







最近发现一个点云分割的框架,安立以下。很是不错,用法简单,速度快。
所需工具为:PCL和SegementerLight
之前提到过安装PCL1.8,但是在默认情况下我们编译的PCL不带NURBS,但是这里需要,所以我们重新安装一下
mkdir build
cd build/
sudo apt-get install cmake-curses-gui
ccmake ..选择”BUILD_surface_on_nurbs” 为 “ON” (default “OFF”)
cmake ..
make -j4
sudo make install安装依赖项
sudo apt-get install libopenni-sensor-primesense-dev
sudo apt-get install libopenni-dev
sudo apt-get install libopenni-sensor-primesense0
sudo apt-get install libopenni0 下载SegmenterLight
cd SegmenterLight/mkdir build
cd build/
ccmake ..press c and then g
make -j4
sudo make install最终测试
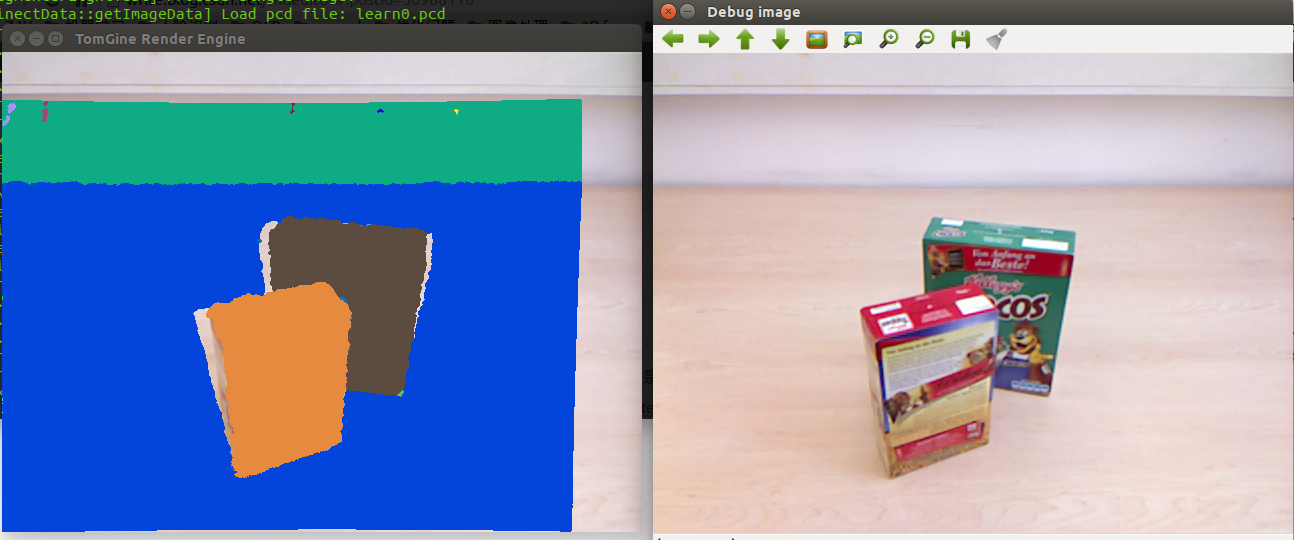
cd SegmenterLight/bin./SegmenterLight -f learn0.pcdlearn0.pcd是放到bin下的待分割文件,出现Debug image的窗口后,点击该窗口按下F9,即可看到分割效果:
要嵌入到自己的工程中,可以直接使用编译出的动态库,
CMakeLists.txt内容
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(v4r_test)
find_package( OpenCV 3 REQUIRED )
find_package(PCL 1.8 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fopenmp")
SET(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -fopenmp")
SET(CMAKE_BUILD_TYPE Release) # Mandatory for openmp!
add_executable(main main.cpp)
target_link_libraries(main ${PCL_LIBRARIES} ${OpenCV_LIBS} v4rTomGine v4rSegmenterLight)main.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_cloud.h>
#include <pcl/console/parse.h>
#include <pcl/common/transforms.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <boost/thread/thread.hpp>
#include <pcl/common/common_headers.h>
#include <pcl/features/normal_3d.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/parse.h>
#include <v4r/SegmenterLight/SegmenterLight.h>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/opencv.hpp>
#include <time.h>
using namespace std;
using namespace cv;
// This function displays the help
void showHelp(char * program_name)
{
std::cout << std::endl;
std::cout << "Usage: " << program_name << " cloud_filename.[pcd|ply]" << std::endl;
std::cout << "-h: Show this help." << std::endl;
}
void PCLCloud2Image(const pcl::PointCloud<pcl::PointXYZRGB>::Ptr & pcl_cloud, cv::Mat_<cv::Vec3b> &image){
unsigned pcWidth = pcl_cloud->width;
unsigned pcHeight = pcl_cloud->height;
unsigned position = 0;
image = cv::Mat_<cv::Vec3b>(pcHeight, pcWidth);
for (unsigned row = 0; row < pcHeight; row++) {
for (unsigned col = 0; col < pcWidth; col++) {
cv::Vec3b &cvp = image.at<cv::Vec3b> (row, col);
position = row * pcWidth + col;
const pcl::PointXYZRGB &pt = pcl_cloud->points[position];
cvp[2] = pt.r;
cvp[1] = pt.g;
cvp[0] = pt.b;
}
}
}
int getLabels(pcl::PointCloud<pcl::PointXYZRGBL>::Ptr cloud){
int max_label = 0;
set<int> result;
for(int i=0; i<cloud->points.size(); i++){
if(cloud->points[i].label > max_label){
max_label = cloud->points[i].label;
}
result.insert(cloud->points[i].label);
}
cout <<"set cout begin " <<endl;
cout <<"set.size = " << result.size()<<endl;
for(set<int>::iterator it = result.begin(); it != result.end(); it++){
cout << *it <<" ";
}
cout <<endl;
return max_label;
}
typedef union
{
struct
{
unsigned char b; // Blue channel
unsigned char g; // Green channel
unsigned char r; // Red channel
unsigned char a; // Alpha channel
};
float float_value;
long long_value;
} RGBValue;
inline float GetRandomColor()
{
RGBValue x;
x.b = std::rand()%255;
x.g = std::rand()%255;
x.r = std::rand()%255;
x.a = 0.;
return x.float_value;
}
// This is the main function
int main (int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZRGB>::Ptr pcl_cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::io::loadPCDFile("learn1.pcd", *pcl_cloud);
cout << pcl_cloud->points[0].r <<endl;
pcl::io::savePCDFileASCII("1111.txt", *pcl_cloud);
std::string modelPath = "../model/";
pcl::PointCloud<pcl::PointXYZRGBL>::Ptr pcl_cloud_labeled(new pcl::PointCloud<pcl::PointXYZRGBL>);
segment::SegmenterLight seg(modelPath);
seg.setFast(true);
seg.setDetail(2);
pcl_cloud_labeled = seg.processPointCloud(pcl_cloud);
int max_label = getLabels(pcl_cloud_labeled);
RGBValue colors[max_label+1];
for(int i=0; i<=max_label; i++){
colors[i].float_value = GetRandomColor();
}
for(int i=0; i<pcl_cloud_labeled->points.size(); i++){
pcl::PointXYZRGB &p = pcl_cloud->points[i];
p.rgb = colors[pcl_cloud_labeled->points[i].label].float_value;
}
pcl::visualization::PCLVisualizer viewer("saldfjald");
viewer.addPointCloud(pcl_cloud);
viewer.addCoordinateSystem(1.0, "cloud", 0);
while(!viewer.wasStopped()){
viewer.spinOnce();
}
std::cout << "okkkkk" << std::endl;
cv::Mat_<cv::Vec3b> src;
long int t1,t2;
t1 = getTickCount();
PCLCloud2Image(pcl_cloud, src);
t2 = getTickCount();
cout << "frequency = " << getTickFrequency() <<endl;
cout << (t2- t1)/getTickFrequency() << " s" <<endl;
cout << "time = " << t2 - t1 << " ms " <<endl;
cv::imshow("saf", src);
cv::waitKey(0);
return 0;
}















 38万+
38万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









