







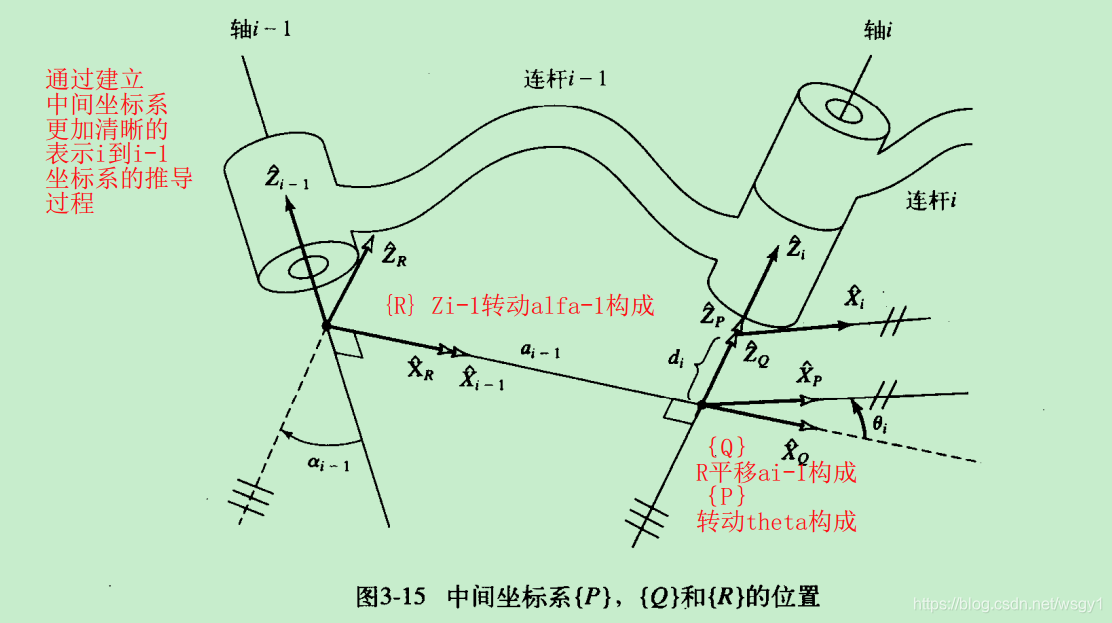
通过建立RQP三个中间坐标系,这样可以简化推导过程
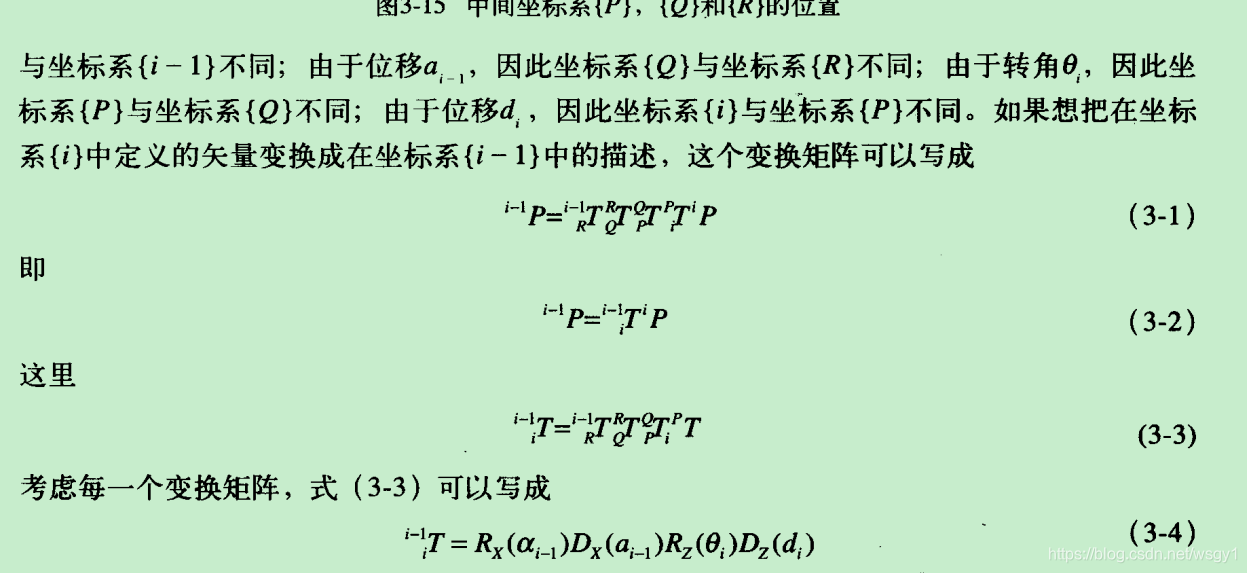
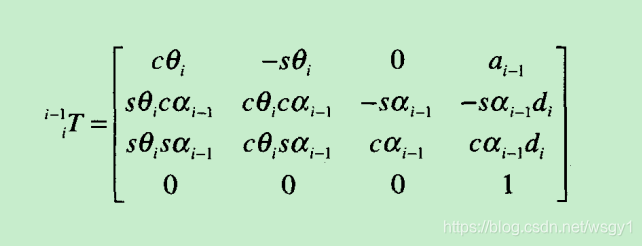
根据DH建模标定后的参数代入下式,可以获得坐标系i中的点在i-1坐标系中的描述。
对于整个机械臂这可以通过每个关节的转换矩阵进行转换
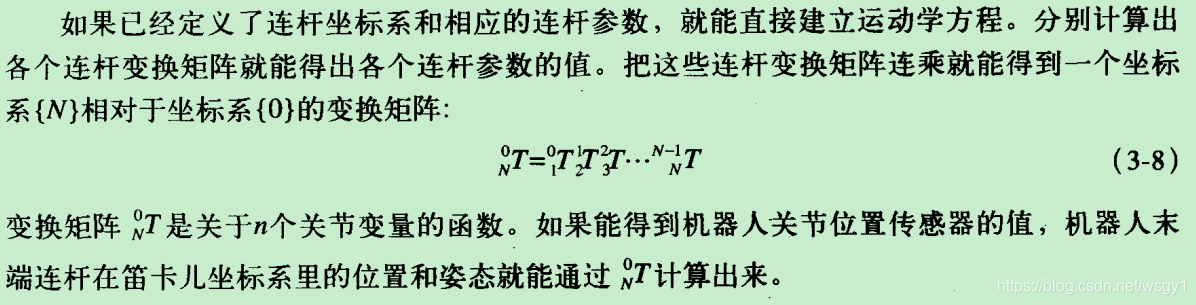
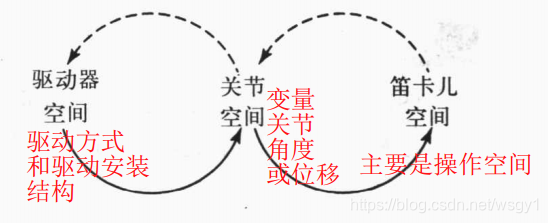
从关节角度 可以推倒出工作空间坐标,也可以推导驱动器的执行命令。这样可以实现机器人的驱动。
从关节角度推导笛卡尔空间的坐标为操作臂的正运动学
从笛卡尔空间推导关节角度是逆运动学。笛卡尔空间的期望位置,要推导关节角度是否有解,可以到达制定位置。
这个角度同时受到驱动器的约束。
通过建立RQP三个中间坐标系,这样可以简化推导过程
根据DH建模标定后的参数代入下式,可以获得坐标系i中的点在i-1坐标系中的描述。
对于整个机械臂这可以通过每个关节的转换矩阵进行转换
从关节角度 可以推倒出工作空间坐标,也可以推导驱动器的执行命令。这样可以实现机器人的驱动。
从关节角度推导笛卡尔空间的坐标为操作臂的正运动学
从笛卡尔空间推导关节角度是逆运动学。笛卡尔空间的期望位置,要推导关节角度是否有解,可以到达制定位置。
这个角度同时受到驱动器的约束。
 1330
4941
1842
1728
1330
4941
1842
1728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























