







 本文详细阐述了旋转矩阵的性质,如转置等于逆和投影特性,并介绍了D-H参数中的标准型和改进型的区别,以及它们在建立机器人坐标系中的应用,包括齐次变换矩阵的生成过程和SDH/MDH参数的异同。
本文详细阐述了旋转矩阵的性质,如转置等于逆和投影特性,并介绍了D-H参数中的标准型和改进型的区别,以及它们在建立机器人坐标系中的应用,包括齐次变换矩阵的生成过程和SDH/MDH参数的异同。
旋转矩阵
性质1.
转置即逆。
因此旋转矩阵是正交阵。另外一点因为旋转矩阵的每一列代表的都是某个坐标系x,y或者z轴的单位矢量在另一个坐标系下的表示。我们知道笛卡尔坐标系的三个坐标轴是相互正交的。从这一点上我们也可以得到转置即逆这个结论。
性质2.
旋转矩阵R的第一列代表坐标系{B}的x轴在坐标系{A}的三个轴上的投影
旋转矩阵R的第二列代表坐标系{B}的y轴单位向量在坐标系{A}的投影
旋转矩阵R的第三列代表坐标系{B}的z轴单位向量在坐标系{A}的投影
性质3.
旋转矩阵的每一行、每一列都是单位向量,即三个元素的平方和为1.
三个性质的具体描述可以参考博客。
关于系列、易于理解的机器人运动学知识同样可以参考此博客的专栏。
D-H
- θ i \theta_i θi: O i − 1 O_{i-1} Oi−1和 O i O_i Oi坐标系之间 x x x轴夹角。
- d i d_i di: O i O_i Oi相对于 O i − 1 O_{i-1} Oi−1在 z i − 1 z_{i-1} zi−1轴方向的偏移量(有向距离),两个 x x x轴的公垂线长度。
- α i \alpha_i αi: L i n k i Link_i Linki驱动轴和传动轴之间的夹角,两个 z z z轴夹角。
-
a
i
a_i
ai:
L
i
n
k
i
Link_i
Linki数学意义上的长度,
O
i
−
1
O_{i-1}
Oi−1和
O
i
O_i
Oi坐标系沿着
x
i
x_{i}
xi的有向距离(公法线长度)。
1和2描述的是 L i n k i − 1 Link_{i-1} Linki−1和 L i n k i Link_i Linki之间的关系,夹角和偏移量,相对于 L i n k i − 1 Link_{i-1} Linki−1的位置关系;
3和4描述的是 L i n k i Link_i Linki固有属性,夹角和长度。
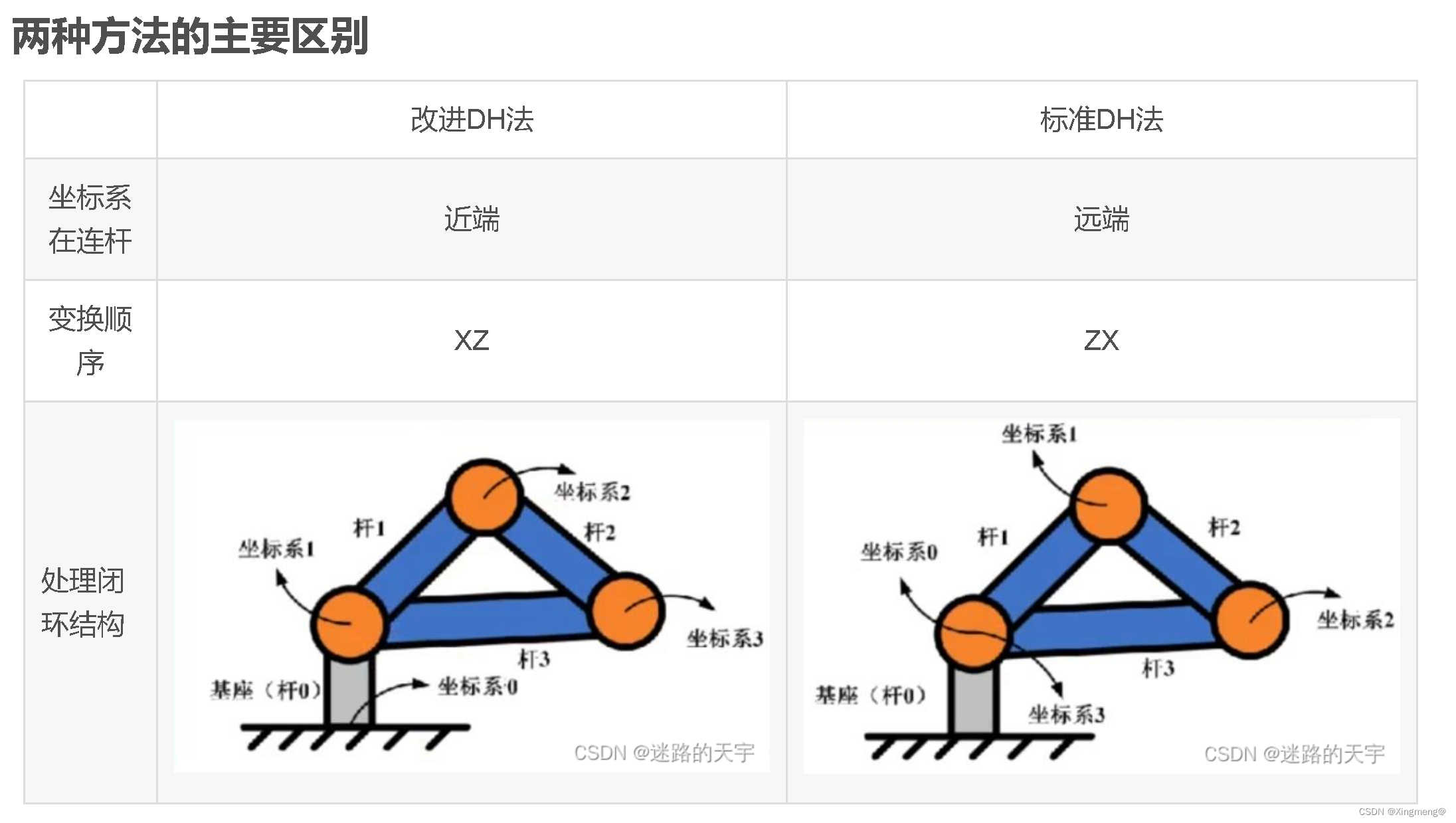
标准型(Standard DH)还是改进型(Modified DH)区别
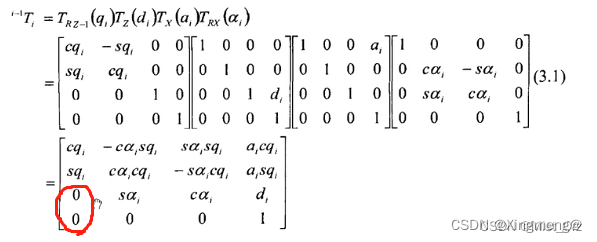
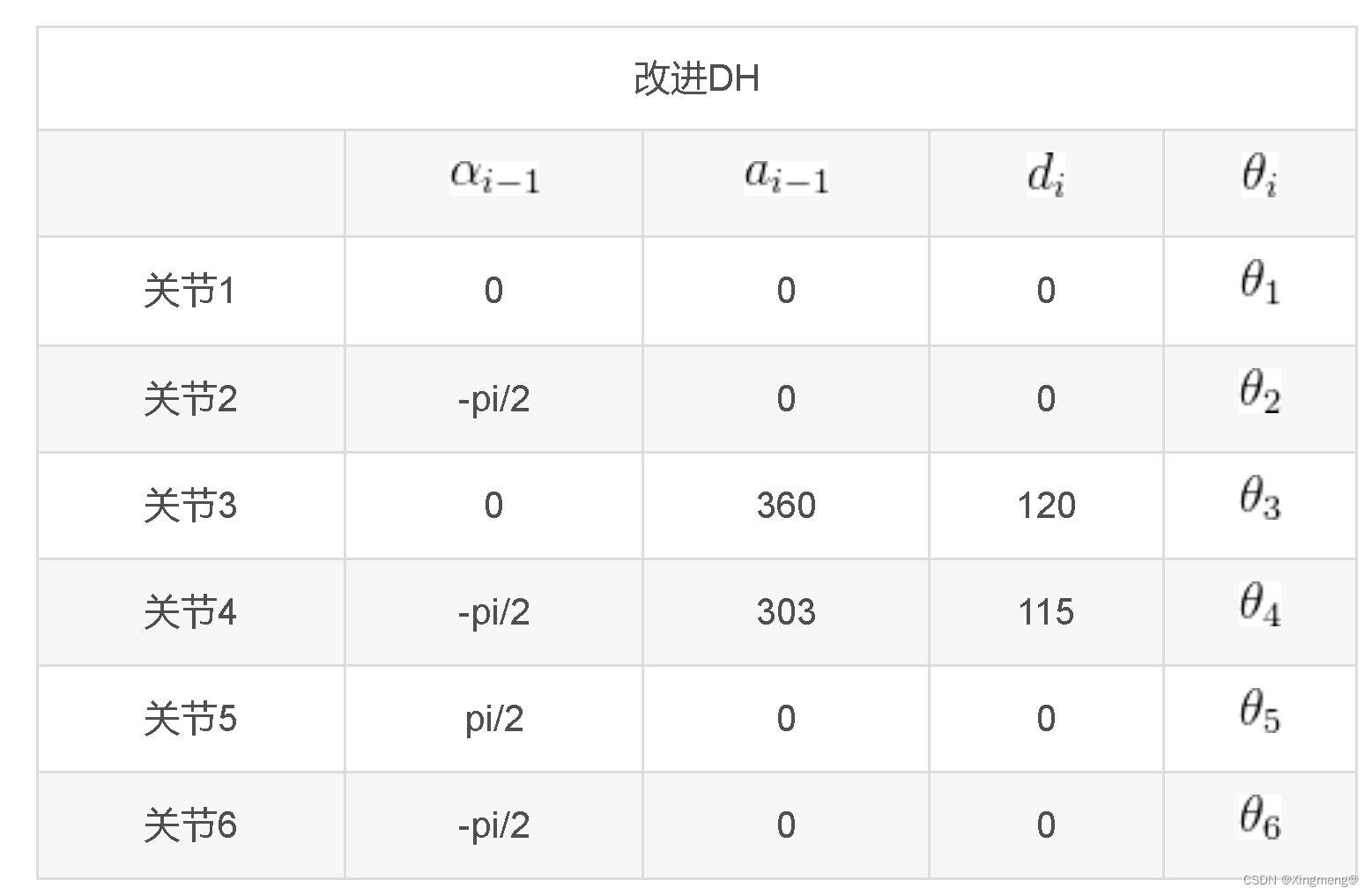
- 根据表达式判断所建立的DH模型是标准型(Standard DH)还是改进型(Modified DH) 第三四行的首元素为0的是标准型,参考博客
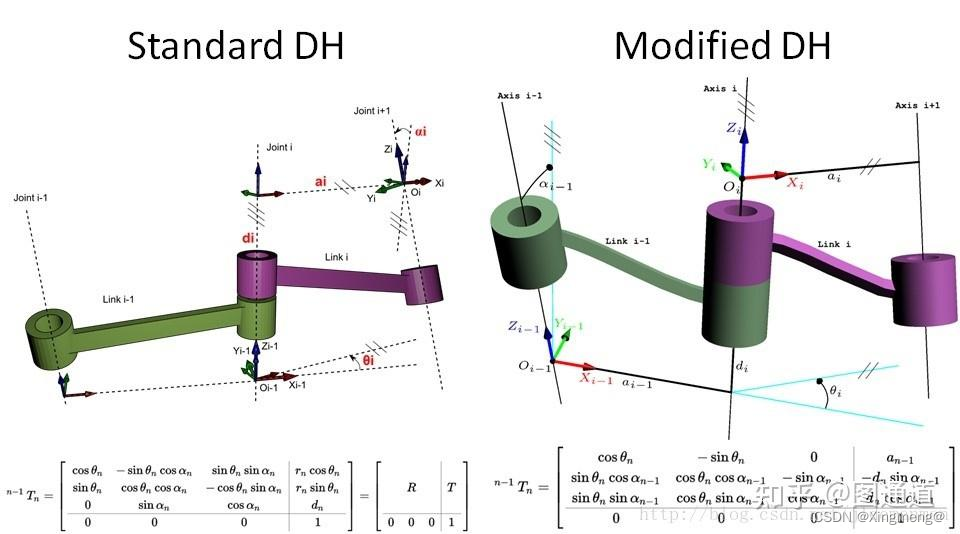
- 标准DH参数坐标系建立在传动轴上,而修正DH参数坐标系建立在驱动轴上。
在DH坐标系中, O i − 1 O_{i-1} Oi−1与 L i n k i − 1 Link_{i-1} Linki−1固连在一起, O i O_{i} Oi与 L i n k i Link_{i} Linki固连在一起。 - 修正DH参数中各个参数的物理意义与标准DH参数是一样的。
- 对于传统的串联机器人而言,两者的表现能力是一样的,没有优劣之分,我们可以选择其中一种方法进行建模。然而,由于修正DH参数坐标系建立在驱动轴上,对于树状结构的机器人,其表现能力更强,可以简化问题。
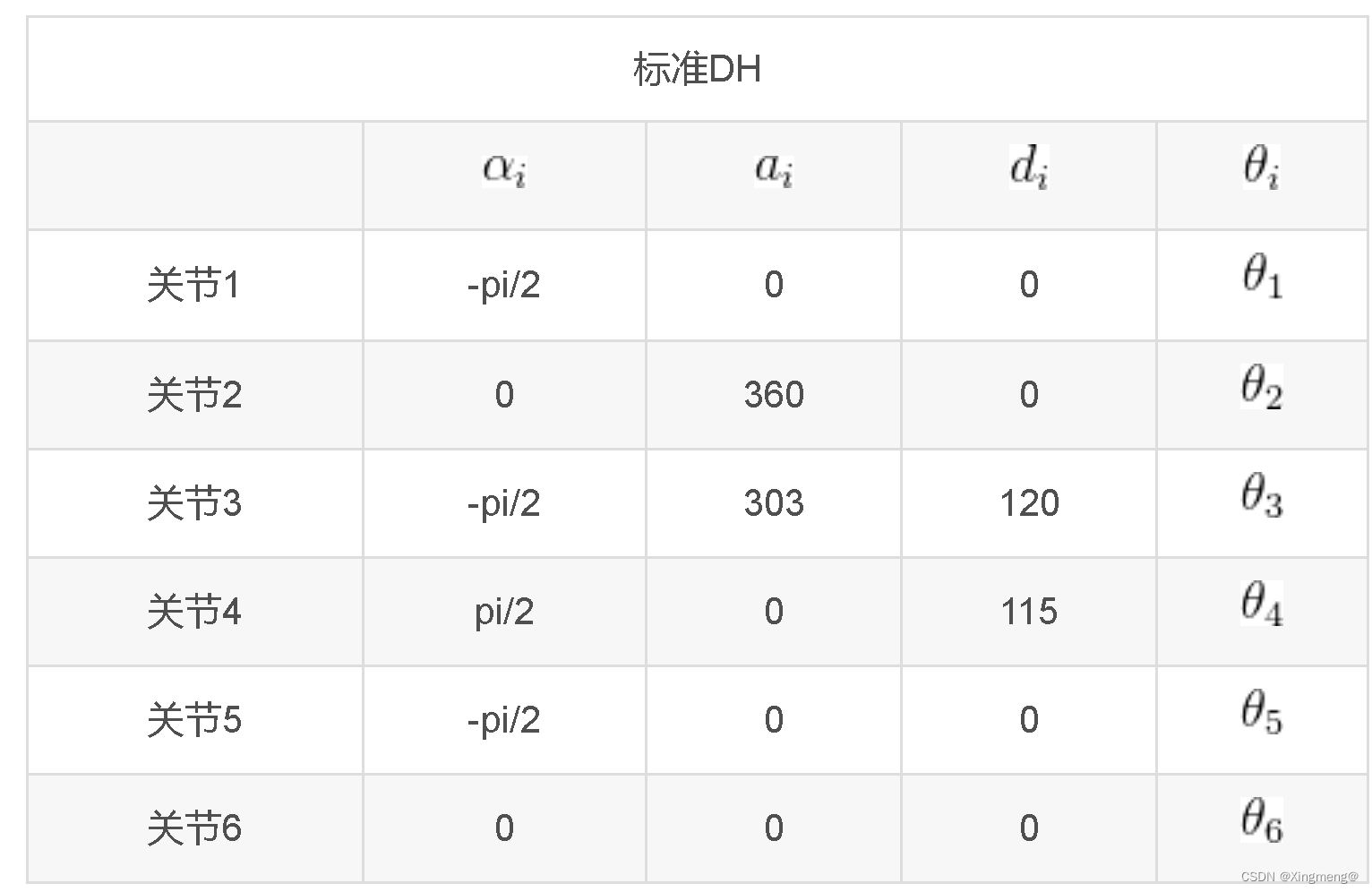
- 对于标准DH参数,根据DH参数表,连乘得到的是末端工具坐标系到机器人基坐标系的齐次变换矩阵;
- 对于修正DH参数,根据DH参数表,连乘得到的是最后一个驱动关节上的坐标系到机器人基坐标系的齐次变换矩阵,变换到末端工具坐标系还需增加一个变换(通常为平移变换)。
-
θ
i
\theta_i
θi和
d
i
d_i
di在SDH和MDH中一样,只有
α
\alpha
α和
a
a
a不同,具体可以参考博客,表述如下:
标准DH和改进型DH参数表的相互转换
















 6550
6550











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









