






 本文详细介绍了速腾聚创RS-M1激光雷达的螺旋扫描方式,包括其5通道扫描机制、交叉区域、垂直和水平分辨率的特点,以及坐标系定义。尽管通道间存在物理错开,但通过标定不影响精度。
本文详细介绍了速腾聚创RS-M1激光雷达的螺旋扫描方式,包括其5通道扫描机制、交叉区域、垂直和水平分辨率的特点,以及坐标系定义。尽管通道间存在物理错开,但通过标定不影响精度。
RS-M1扫描方式
RS-M1扫描方式
激光雷达的扫描方式对于点云数据存储以及特征提取等将产生很大影响。与传统旋转式激光雷达扫描方式不同,固态激光雷达通常为不规则的扫描方式,比如大疆的为花瓣形扫描方式,而本文将介绍速腾聚创RS-M1扫描方式为螺旋型扫描。
M1 的 5 个通道通过一个镜子进行扫描,意味着同一时刻发出去 5 个点,一行扫描结束总计 625 个点,其中每个通道对应 125 个点,总计扫描 126 行。
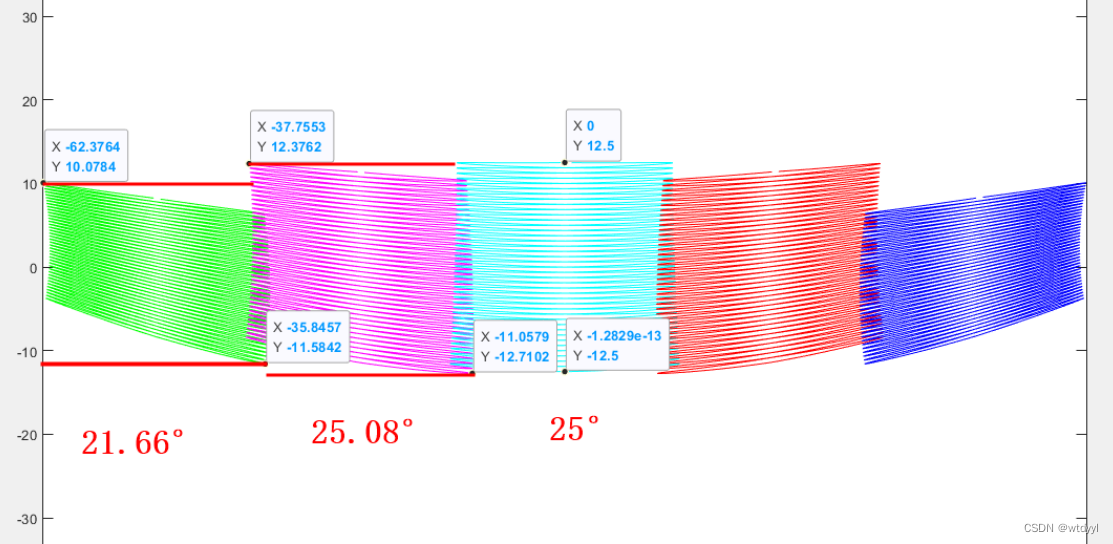
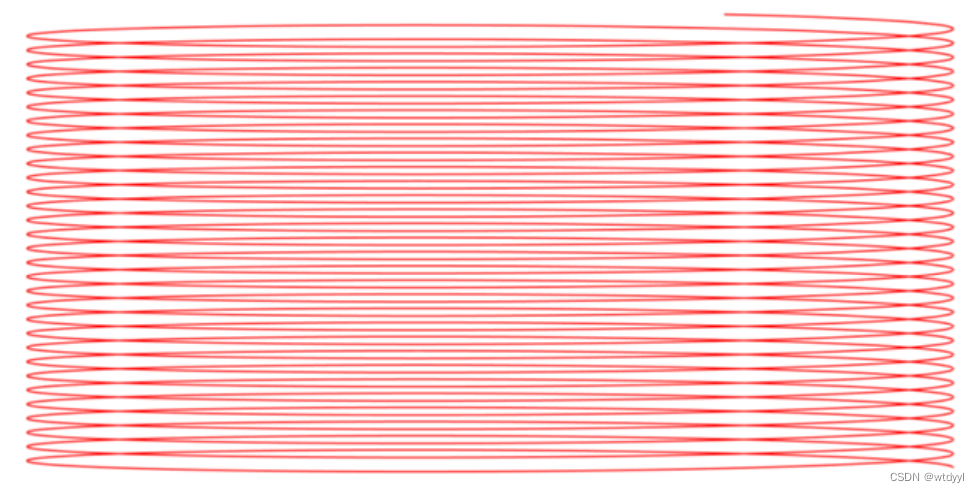
下图是单个通道理论的一个扫描轨迹,为螺旋式扫描,因此在局部存在交叉的情况。目前由于镜子本身的椭圆度参数特性存在差异,所以实际控制的扫描轨迹的交叉区域存在不同,因此出现了交叉区域在视场中间的情况。
螺旋扫描的方式决定了垂直方向上的分辨率并不是均匀分布,根据 126 线,25°的垂直 FOV 推算,其平均垂直分辨率是 0.2°。垂直分辨率是由振镜的慢轴(pitch 方向摆动)决定,水平分辨率则是由振镜的快轴(yaw 方向摆动)决定,每一行从左到右或者从右到左,并不是一个匀速过程,意味着水平分辨率也并不是均匀分布,根据一行 125 个点,25°水平 FOV 推算,其平均水平分辨率是0.2°。
通道与通道之间垂直的排列方向有一定的错开,每个视场区域自己的 FoV不完全一致。物理上的排列错开,并不会影响到点云的精度,只要通道与通道之间标定对准后,扫描一面墙,在重合区域的精度是完全正常的,并不会造成扫描到的相同区域在点云上面产生错误的错位现象。
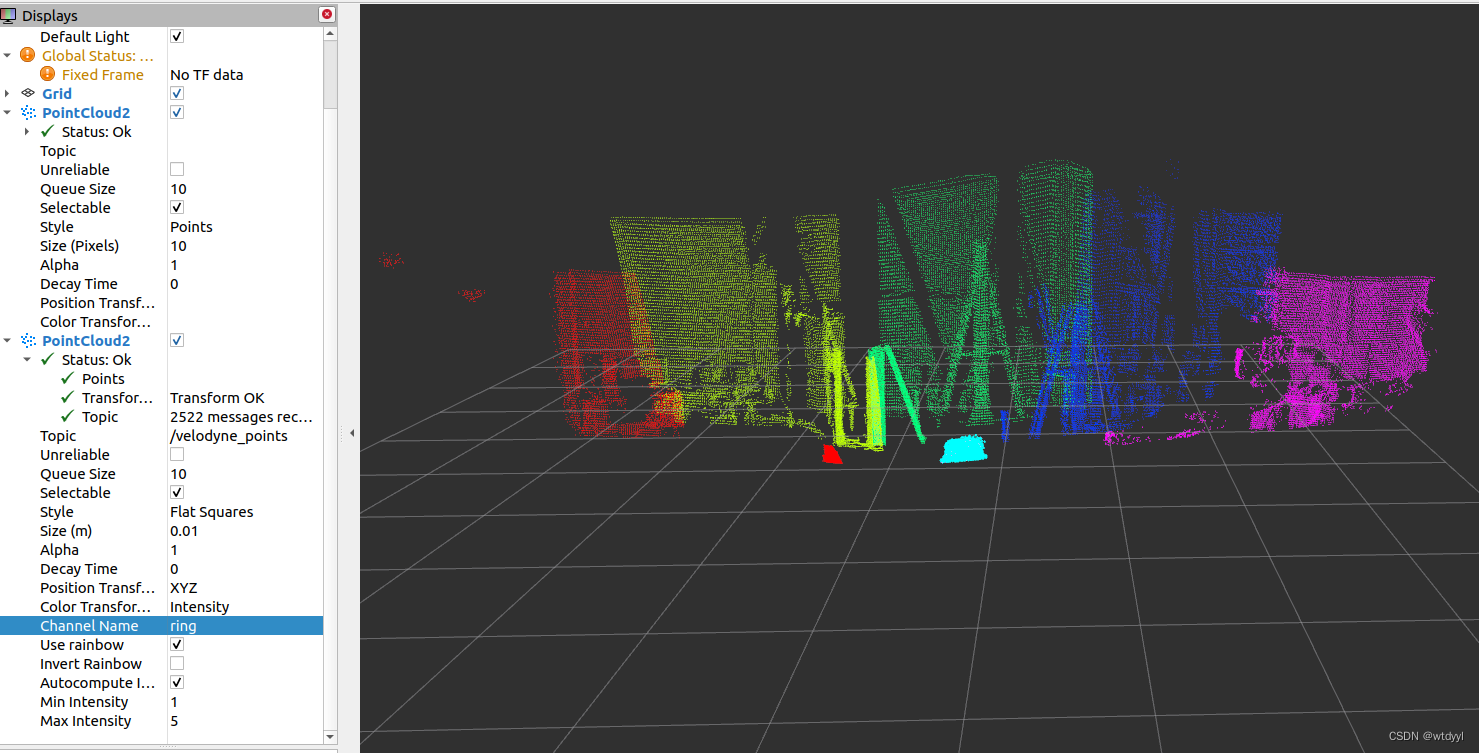
在实验室环境下测试RS-M1采集到点云将其按通道着色如图3,可见中间通道垂直视角明显大于两侧。
RS-M1坐标系定义
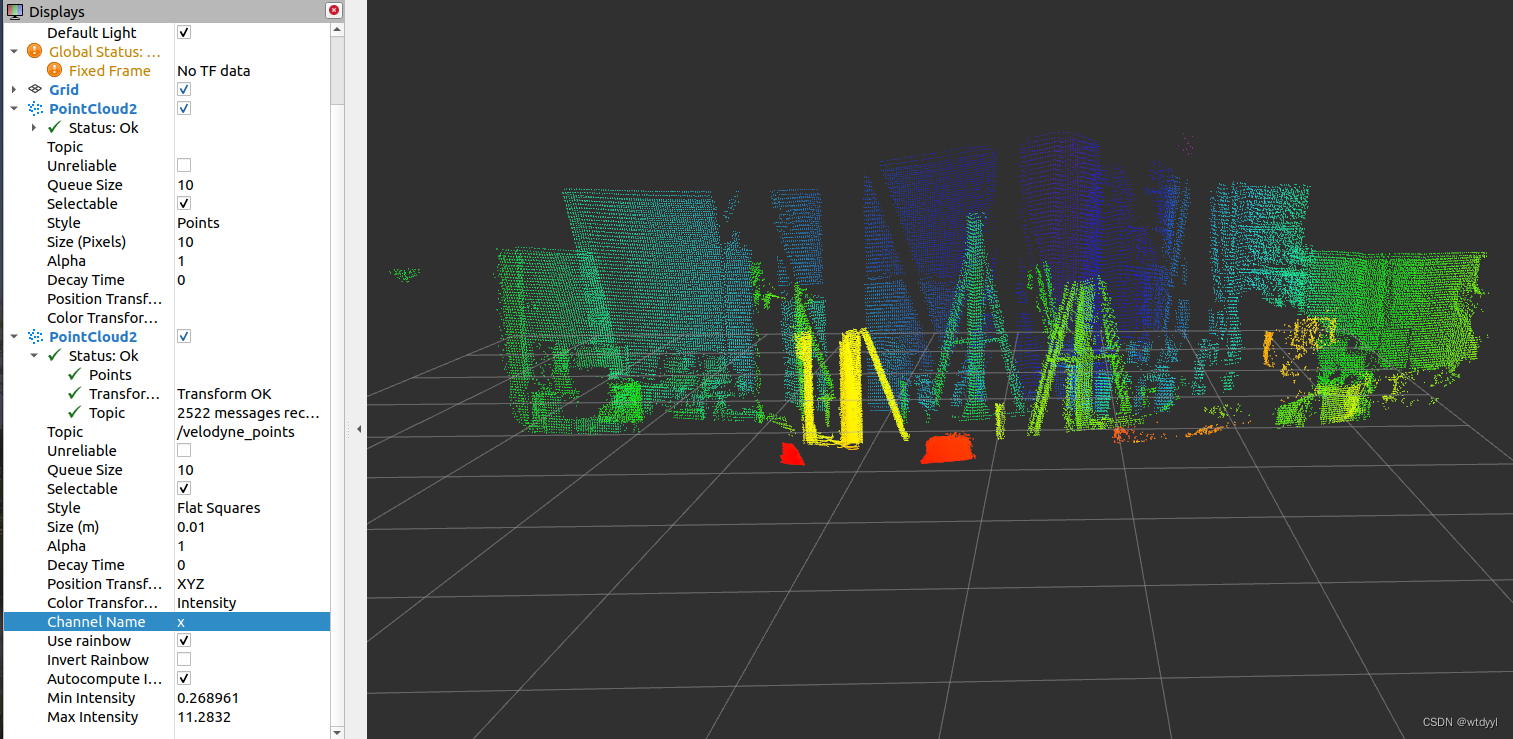
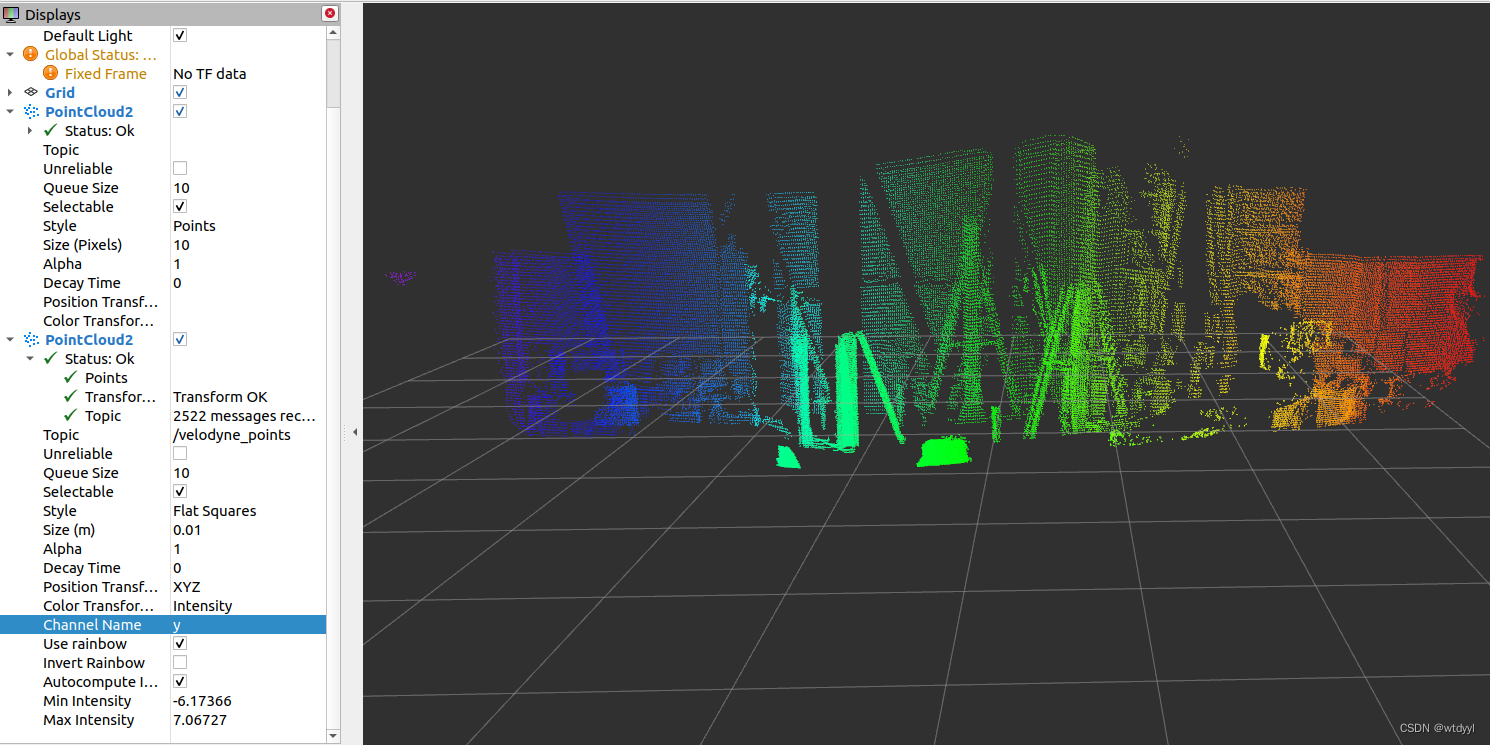
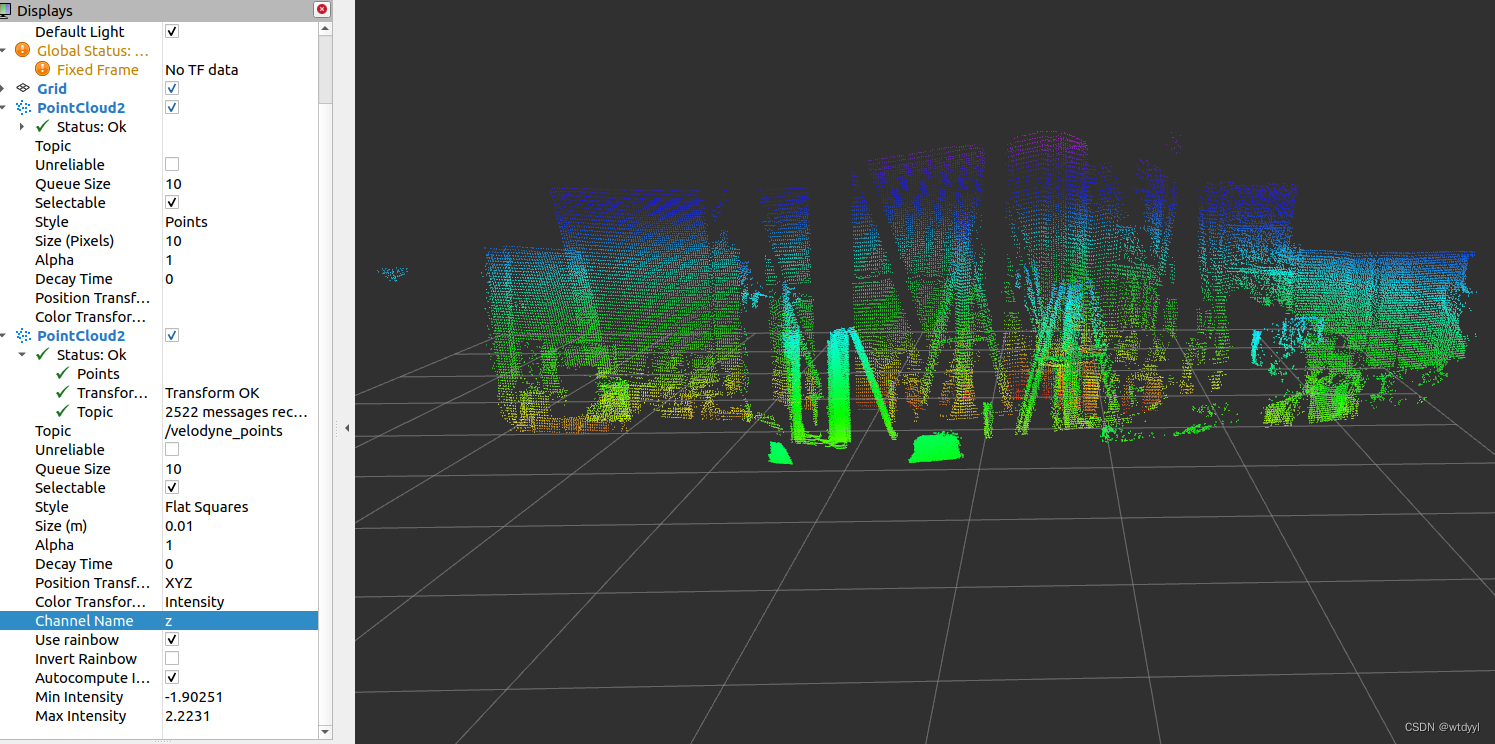
RS-M1坐标系定义为前(X)左(Y)上(Z),下列三图依次为依据XYZ三轴点云距离大小着色,由红–>紫依次增大

















 384
384

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









