







一、从URDF到XACRO
1.声明xml与xacro
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://ros.org/wiki/xacro">2.声明模型所需要的宏,今后便于修改。通过修改对应宏的参数即可对全局参数进行修改。
<!-- Defining the colors used in this robot -->
<material name="Black">
<color rgba="0 0 0 1"/>
</material>
<material name="White">
<color rgba="1 1 1 1"/>
</material>
<material name="Blue">
<color rgba="0 0 1 1"/>
</material>
<material name="Red">
<color rgba="1 0 0 1"/>
</material>
<!-- Constants -->
<xacro:property name="M_PI" value="3.14159"/>
<!-- link1 properties -->
<xacro:property name="link1_width" value="0.03" />
<xacro:property name="link1_len" value="0.10" />
<!-- link2 properties -->
<xacro:property name="link2_width" value="0.03" />
<xacro:property name="link2_len" value="0.14" />
<!-- link3 properties -->
<xacro:property name="link3_width" value="0.03" />
<xacro:property name="link3_len" value="0.22" />
<!-- link4 properties -->
<xacro:property name="link4_width" value="0.025" />
<xacro:property name="link4_len" value="0.06" />
<!-- link5 properties -->
<xacro:property name="link5_width" value="0.03" />
<xacro:property name="link5_len" value="0.06" />
<!-- link6 properties -->
<xacro:property name="link6_width" value="0.04" />
<xacro:property name="link6_len" value="0.02" />
<!-- Left gripper -->
<xacro:property name="left_gripper_len" value="0.08" />
<xacro:property name="left_gripper_width" value="0.01" />
<xacro:property name="left_gripper_height" value="0.01" />
<!-- Right gripper -->
<xacro:property name="right_gripper_len" value="0.08" />
<xacro:property name="right_gripper_width" value="0.01" />
<xacro:property name="right_gripper_height" value="0.01" />
<!-- Gripper frame -->
<xacro:property name="grasp_frame_radius" value="0.001" />
<!-- Inertial matrix -->
<xacro:macro name="inertial_matrix" params="mass">
<inertial>
<mass value="${mass}" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="0.5" iyz="0.0" izz="1.0" />
</inertial>
</xacro:macro>
(1)颜色宏。
(2)机器人尺寸。
(3)其中注意惯性矩阵的宏,惯性矩阵通过网上查询,mass为质量大小,单位为kg。
3.关节与杆,六个关节,7个杆(多个base_link)
<!-- /// bottom_joint // -->
<joint name="bottom_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 0" />
<parent link="base_link"/>
<child link="bottom_link"/>
</joint>
<link name="bottom_link">
<visual>
<origin xyz=" 0 0 -0.02" rpy="0 0 0"/>
<geometry>
<box size="1 1 0.02" />
</geometry>
<material name="Brown" />
</visual>
<collision>
<origin xyz=" 0 0 -0.02" rpy="0 0 0"/>
<geometry>
<box size="1 1 0.02" />
</geometry>
</collision>
<xacro:inertial_matrix mass="500"/>
</link>
<!-- / BASE LINK // -->
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.04" />
</geometry>
<material name="White" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.04" />
</geometry>
</collision>
<xacro:inertial_matrix mass="1"/>
</link>
<joint name="joint1" type="revolute">
<parent link="base_link"/>
<child link="link1"/>
<origin xyz="0 0 0.02" rpy="0 ${M_PI/2} 0" />
<axis xyz="-1 0 0" />
<limit effort="300" velocity="1" lower="-2.96" upper="2.96"/>
<dynamics damping="50" friction="1"/>
</joint>
<!-- / LINK1 // -->
<link name="link1" >
<visual>
<origin xyz="-${link1_len/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link1_width}" length="${link1_len}"/>
</geometry>
<material name="Blue" />
</visual>
<collision>
<origin xyz="-${link1_len/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link1_width}" length="${link1_len}"/>
</geometry>
</collision>
<xacro:inertial_matrix mass="1"/>
</link>
<joint name="joint2" type="revolute">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="-${link1_len} 0 0.0" rpy="-${M_PI/2} 0 ${M_PI/2}" />
<axis xyz="1 0 0" />
<limit effort="300" velocity="1" lower="-2.35" upper="2.35" />
<dynamics damping="50" friction="1"/>
</joint>
<!-- /// LINK2 // -->
<link name="link2" >
<visual>
<origin xyz="0 0 ${link2_len/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link2_width}" length="${link2_len}"/>
</geometry>
<material name="White" />
</visual>
<collision>
<origin xyz="0 0 ${link2_len/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link2_width}" length="${link2_len}"/>
</geometry>
</collision>
<xacro:inertial_matrix mass="1"/>
</link>
<joint name="joint3" type="revolute">
<parent link="link2"/>
<child link="link3"/>
<origin xyz="0 0 ${link2_len}" rpy="0 ${M_PI} 0" />
<axis xyz="-1 0 0" />
<limit effort="300" velocity="1" lower="-2.62" upper="2.62" />
<dynamics damping="50" friction="1"/>
</joint>
<!-- / LINK3 / -->
<link name="link3" >
<visual>
<origin xyz="0 0 -${link3_len/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link3_width}" length="${link3_len}"/>
</geometry>
<material name="Blue" />
</visual>
<collision>
<origin xyz="0 0 -${link3_len/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link3_width}" length="${link3_len}"/>
</geometry>
</collision>
<xacro:inertial_matrix mass="1"/>
</link>
<joint name="joint4" type="revolute">
<parent link="link3"/>
<child link="link4"/>
<origin xyz="0.0 0.0 -${link3_len}" rpy="0 ${M_PI/2} ${M_PI}" />
<axis xyz="1 0 0" />
<limit effort="300" velocity="1" lower="-2.62" upper="2.62" />
<dynamics damping="50" friction="1"/>
</joint>
<!-- /// LINK4 -->
<link name="link4" >
<visual>
<origin xyz="${link4_len/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link4_width}" length="${link4_len}"/>
</geometry>
<material name="Black" />
</visual>
<collision>
<origin xyz="${link4_len/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link4_width}" length="${link4_len}"/>
</geometry>
</collision>
<xacro:inertial_matrix mass="1"/>
</link>
<joint name="joint5" type="revolute">
<parent link="link4"/>
<child link="link5"/>
<origin xyz="${link4_len} 0.0 0.0" rpy="0 ${M_PI/2} 0" />
<axis xyz="1 0 0" />
<limit effort="300" velocity="1" lower="-2.62" upper="2.62" />
<dynamics damping="50" friction="1"/>
</joint>
<!-- // LINK5 / -->
<link name="link5">
<visual>
<origin xyz="0 0 ${link4_len/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link5_width}" length="${link5_len}"/>
</geometry>
<material name="White" />
</visual>
<collision>
<origin xyz="0 0 ${link4_len/2} " rpy="0 0 0" />
<geometry>
<cylinder radius="${link5_width}" length="${link5_len}"/>
</geometry>
</collision>
<xacro:inertial_matrix mass="1"/>
</link>
<joint name="joint6" type="revolute">
<parent link="link5"/>
<child link="link6"/>
<origin xyz="0 0 ${link4_len}" rpy="${1.5*M_PI} -${M_PI/2} 0" />
<axis xyz="1 0 0" />
<limit effort="300" velocity="1" lower="-6.28" upper="6.28" />
<dynamics damping="50" friction="1"/>
</joint>
<!-- LINK6 / -->
<link name="link6">
<visual>
<origin xyz="${link6_len/2} 0 0 " rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link6_width}" length="${link6_len}"/>
</geometry>
<material name="Blue" />
</visual>
<collision>
<origin xyz="${link6_len/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link6_width}" length="${link6_len}"/>
</geometry>
</collision>
<xacro:inertial_matrix mass="1"/>
</link>
<joint name="finger_joint1" type="prismatic">
<parent link="link6"/>
<child link="gripper_finger_link1"/>
<origin xyz="0.0 0 0" />
<axis xyz="0 1 0" />
<limit effort="100" lower="0" upper="0.06" velocity="1.0"/>
<dynamics damping="50" friction="1"/>
</joint>(1)<joint>: 定义joint的名字、定义joint的类别、定义joint的起始位姿,定义所连接杆的父子关系。<axis xyz=" ">对旋转轴方向进行了定义。通过<limit>对力、速度、角度的限制(弧度制)。通过<dynamics>对动力学参数阻尼与摩擦进行了定义。
(2)<link>:分<visual>可视化部分与<collision>碰撞部分。其中可视化部分定义了杆模型建立的起始位置、几何形状与颜色(gazebo需要重新定义)。其中碰撞部分定义了碰撞包围盒的起始位置与几何形状。同时此处的碰撞矩阵<inertial>部分通过宏定义的方式只对质量mass(kg)进行了修改。
4.加入gazebo属性
<!-- / Gazebo // -->
<gazebo reference="bottom_link">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="base_link">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link1">
<material>Gazebo/Blue</material>
</gazebo>
<gazebo reference="link2">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link3">
<material>Gazebo/Blue</material>
</gazebo>
<gazebo reference="link4">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="link5">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link6">
<material>Gazebo/Blue</material>
</gazebo>
<gazebo reference="gripper_finger_link1">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="gripper_finger_link2">
<material>Gazebo/White</material>
</gazebo>
<!-- Transmissions for ROS Control -->
<xacro:macro name="transmission_block" params="joint_name">
<transmission name="tran1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${joint_name}">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor1">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:transmission_block joint_name="joint1"/>
<xacro:transmission_block joint_name="joint2"/>
<xacro:transmission_block joint_name="joint3"/>
<xacro:transmission_block joint_name="joint4"/>
<xacro:transmission_block joint_name="joint5"/>
<xacro:transmission_block joint_name="joint6"/>
<xacro:transmission_block joint_name="finger_joint1"/>
<!-- ros_control plugin -->
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/arm</robotNamespace>
</plugin>
</gazebo>(1)gazebo需要重新定义材料颜色。
(2)通过编写宏与使用宏,为每个joint提供传动装置,注意硬件抽象的接口。
(3)调用ros_control插件,并再机器人命名空间对机器人进行命名。ros_control插件是libgazebo_ros_control.so。
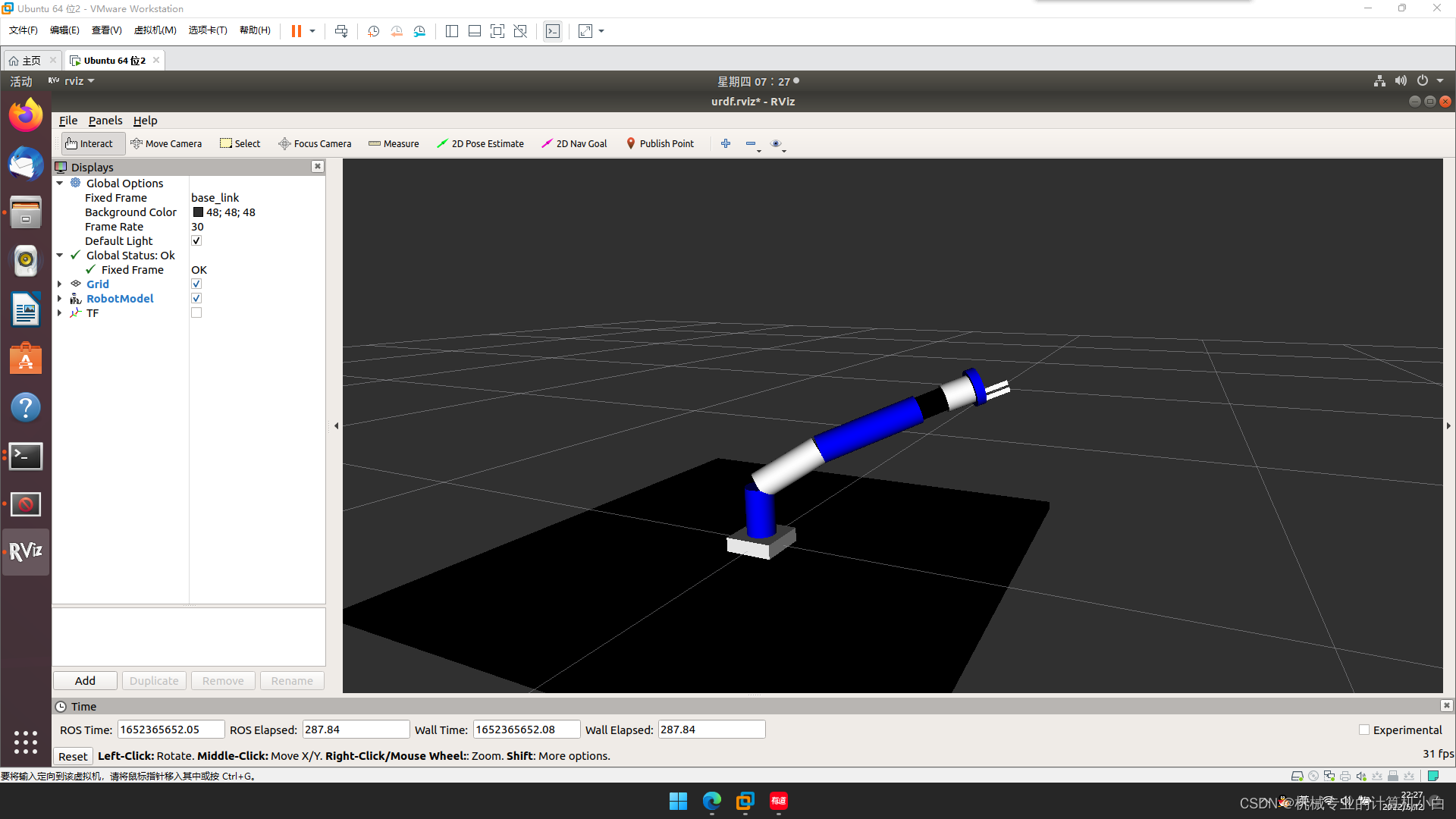
5.机械臂模型可视化
通过rviz可视化显示。首先编写launch文件,依次完成
(1)加载机器人模型参数,在相应位置添加正确的路径。
(2)关节控制器GUI调用,小工具——滑动条。
(3)joint_state_publisher,注意加上_gui,其作用是发布关节状态(除了fixed),关节状态发布者。robot_state_publisher,作用是将机器人各个link和joint之间关系通过TF形式整理成三维姿态信息并发布。
(4)运行rviz。
launch>
<arg name="model" />
<!-- 加载机器人模型参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder $(find marm_description)/urdf/arm.xacro" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find marm_description)/urdf.rviz" required="true" />
</launch>原书基于ubuntu16.04版本kinetic版本,需要小改。
6.运行launch文件
出现警告,但rviz仍正常运行:
[ WARN] [1652365357.956639182]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
(1)robot_state_publisher通过TF方式发布link与joint的三维位姿。勾选TF。
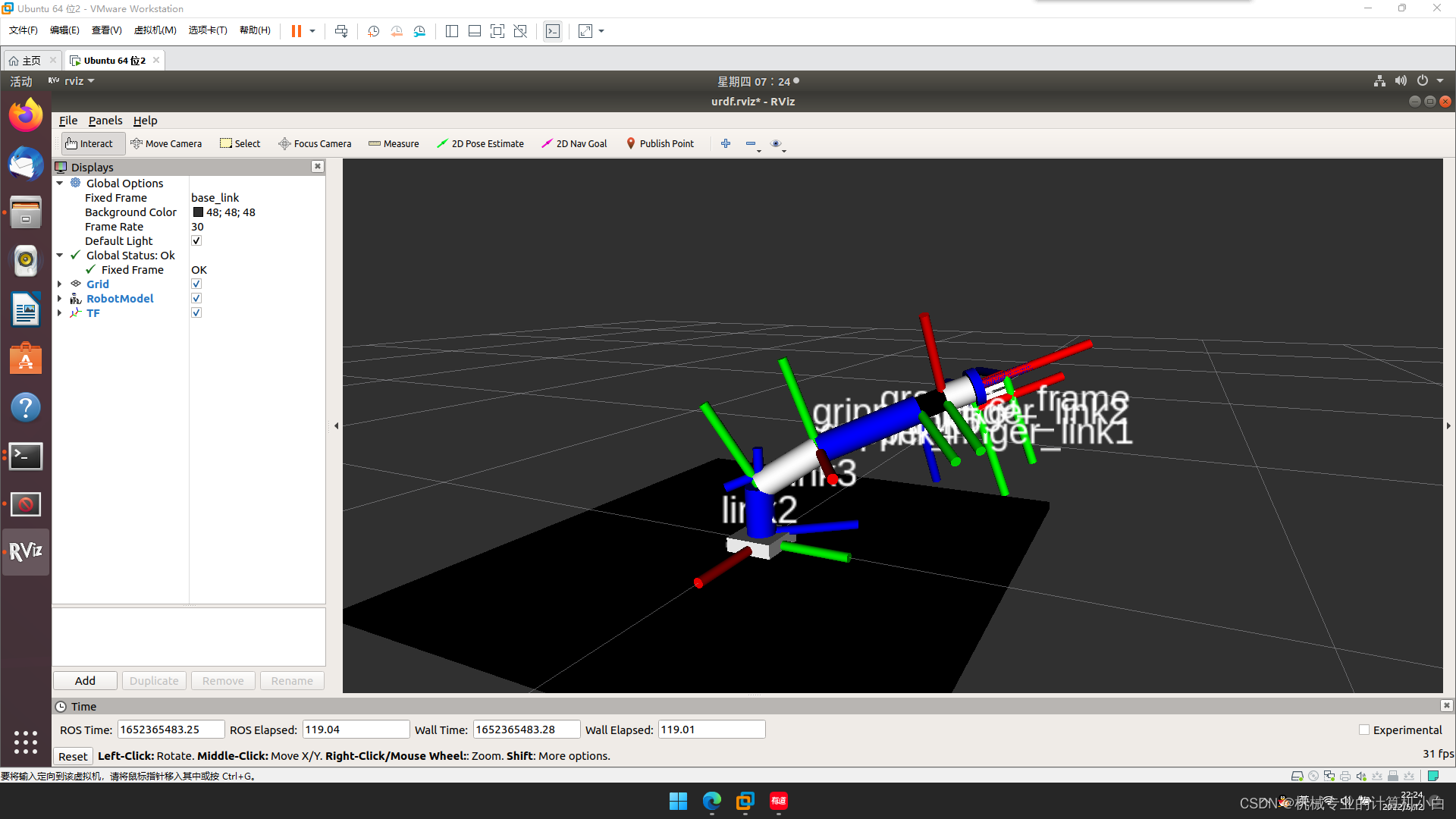
(2)GUI界面的使用
拖动条调整除fixed以外的关节的角度。
Randomize随机位姿。
Center初始位姿。















 1647
1647











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









