







目录
仿真
完整框图
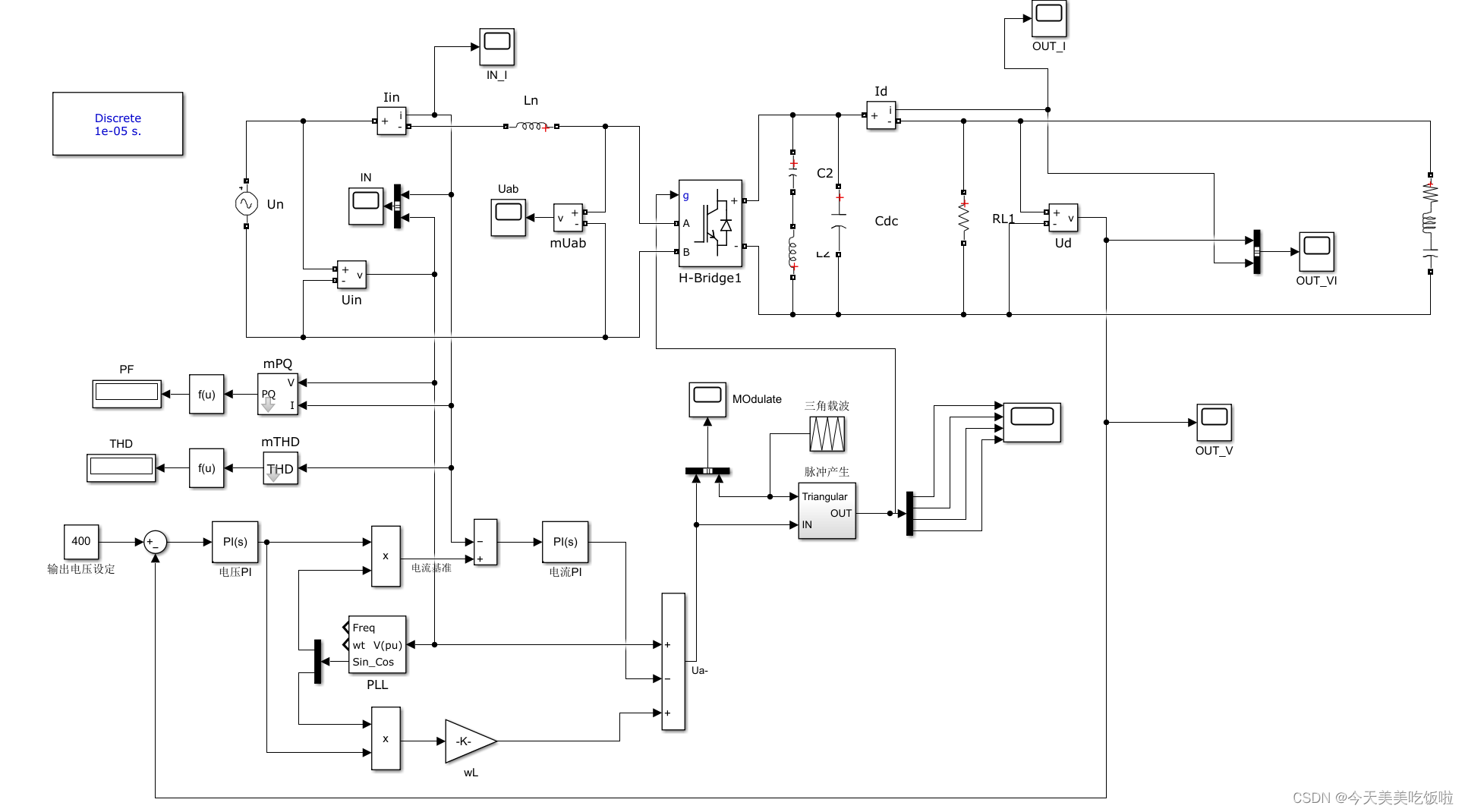
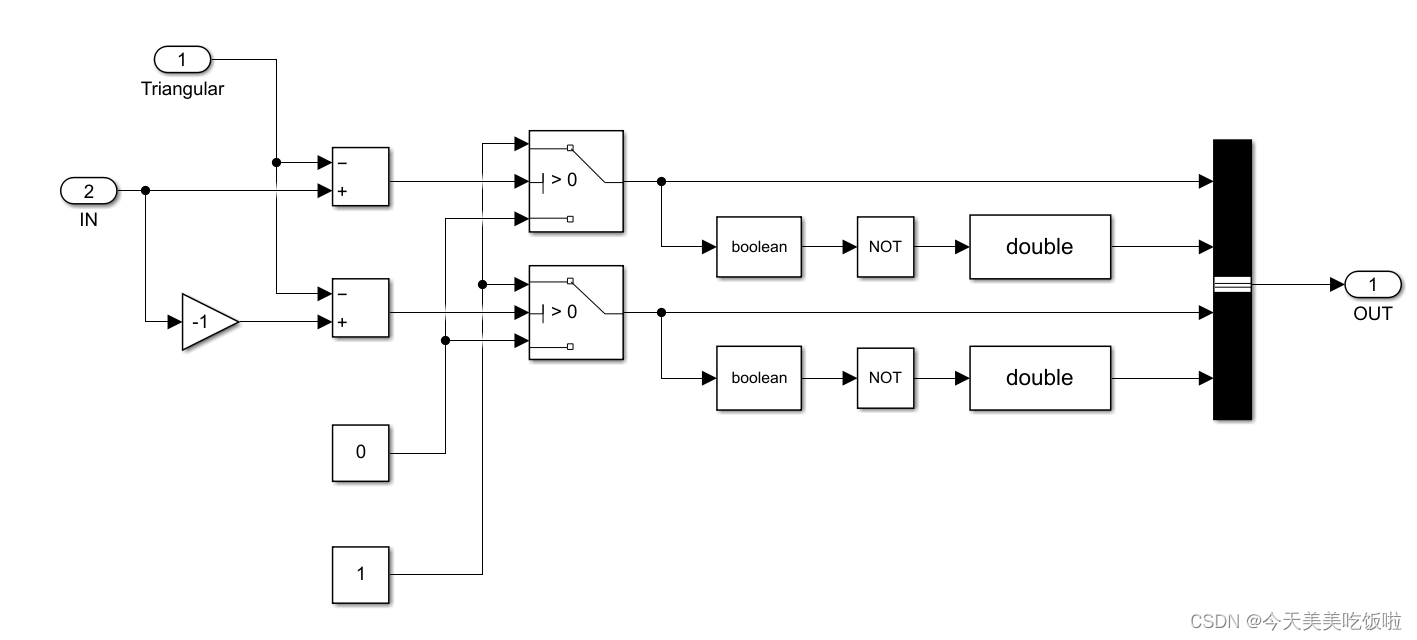
pwm内部调制方式
仿真结果
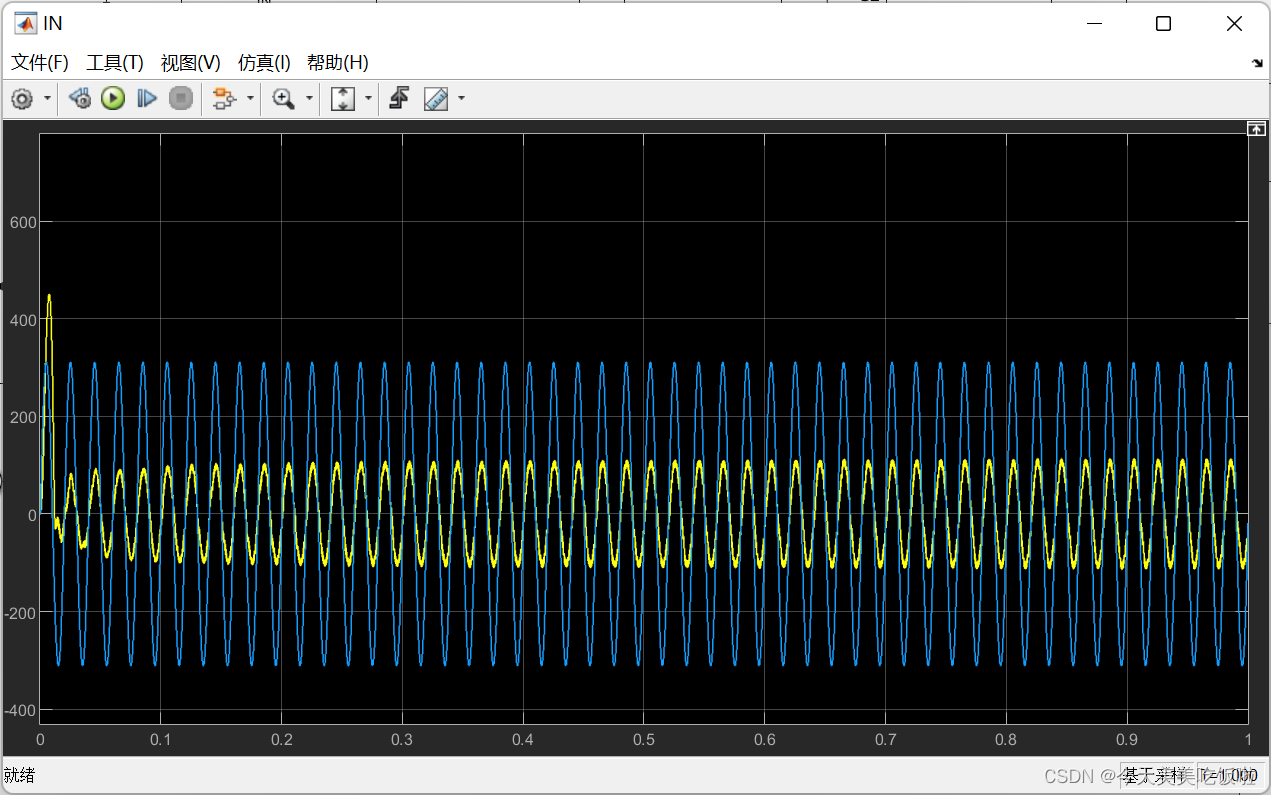
输入电压和输入电流
输出电压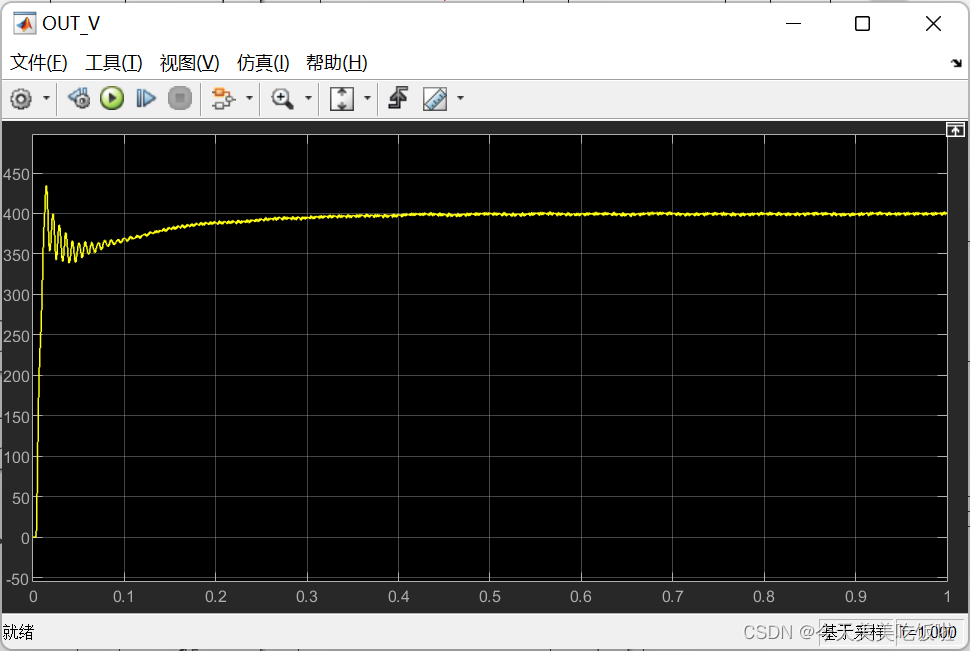
关键源代码
PI参数初始化以及位置式PI计算
void Init_PID(void)
{
pid_Udc.SetValue = 60;
pid_Udc.ActualValue = 0;
pid_Udc.KP = 0;
pid_Udc.KI = 0.6;
pid_Udc.KD = 0;
pid_Udc.ek = 0;
pid_Udc.ek_1 = 0;
pid_Udc.ek_2 = 0;
pid_Udc.PIDmax = tbprd;
pid_Udc.PIDmin = -tbprd;
pid_Udc.Sum_max = 3;
pid_Udc.Sum_min = -3;
pid_Iac.SetValue = 0;
pid_Iac.ActualValue = 0;
// pid_Iac.KP = 18; // 1000mH KP
// pid_Iac.KP = 17;
// pid_Iac.KP = 15;
//pid_Iac.KP = 18; PF=97;
// pid_Iac.KP = 20.5; 94
//pid_Iac.KP=19.5; 94
//pid_Iac.KP=17; 97 98
pid_Iac.KP=17.5; // 50 60 欧姆
// pid_Iac.KP=22;
// pid_Iac.KP = 15;
pid_Iac.KI = 0;
pid_Iac.ek = 0;
pid_Iac.ek_1 = 0;
pid_Iac.ek_2 = 0;
pid_Iac.PIDmax = 1;
pid_Iac.PIDmin = -1;
pid_Iac.Sum_max = 3;
pid_Iac.Sum_min = -3;
// pid_Iac.Sum_max = 5;
// pid_Iac.Sum_min = -5;
// 电流不需要限幅
}
float PID_Control_Inc(PID *pid, int flag) // 增量式PID
{
float inc = 0;
pid->ek = pid->SetValue - pid->ActualValue;
inc = pid->KP * (pid->ek - pid->ek_1) + pid->KI * pid->ek
+ pid->KD * (pid->ek - 2 * pid->ek_1 + pid->ek_2);
if (inc > pid->PIDmax)
return pid->PIDmax;
if (inc < pid->PIDmin)
return pid->PIDmin;
return inc;
}
float PID_Control_Pos(PID *pid, int flag) // 位置式PID
{
float Pos = 0;
pid->ek = pid->SetValue - pid->ActualValue;
// int flag = 0; // 积分分离pid
// if (fabsf(pid->ek) >= 20)
// flag = 0;
// else
// flag = 1;
pid->ek_sum += pid->ek;
Pos = pid->KP * pid->ek + pid->KI * pid->ek_sum;
// + pid->KD * (pid->ek - pid->ek_1);
// 积分限幅
if (pid->ek_sum > pid->Sum_max)
pid->ek_sum = pid->Sum_max;
if (pid->ek_sum < pid->Sum_min)
pid->ek_sum = pid->Sum_min;
pid->PIDout = Pos;
if (flag == 0)
{
if (Pos > pid->PIDmax)
{
pid->PIDout = pid->PIDmax;
return pid->PIDmax;
}
if (Pos < pid->PIDmin)
{
pid->PIDout = pid->PIDmin;
return pid->PIDmin;
}
return pid->PIDout;
}
else
return pid->PIDout;
}锁相环计算
#define DPLL_LOOP(X) LPF_LG.FilterInput = X * HPLL.CosFeedback ;\
LPF_LG.U[2] = LPF_LG.FilterInput - LPF_LG.a*LPF_LG.U[1] - LPF_LG.b *LPF_LG.U[0];\
LPF_LG.Filteroutput = LPF_LG.c*(LPF_LG.U[2] + 2*LPF_LG.U[1] + LPF_LG.U[0]);\
LPF_LG.U[0]=LPF_LG.U[1];\
LPF_LG.U[1]=LPF_LG.U[2];\
HPLL.EphiIntegral +=LPF_LG.Filteroutput * Ts;\
HPLL.w = HPLL.Kp * LPF_LG.Filteroutput + HPLL.Ki * HPLL.EphiIntegral;\
HPLL.AngleVelocityIntegral = HPLL.AngleVelocityIntegral + ( HPLL.w + 100*PI)*Ts;\
HPLL.wt = HPLL.AngleVelocityIntegral - ((int)(HPLL.AngleVelocityIntegral*0.15915494309189533576888376337251))*(2*PI);\
HPLL.AngleVelocityIntegral = HPLL.wt;\
HPLL.CosFeedback = cosf(HPLL.wt);
#endif
void LPF_Data_Init(struct LPF_But * LPF)
{
float m;
m = LPF->SamplePeriod / PI / LPF->Fstop; // 2*Fs/wf
LPF->a = 2 * (1 - m * m) / (m * m + m / LPF->QualityFactor + 1);
LPF->b = (m * m - m / LPF->QualityFactor + 1)
/ (m * m + m / LPF->QualityFactor + 1);
LPF->c = 1 / (m * m + m / LPF->QualityFactor + 1);
LPF->e = m / LPF->QualityFactor / (m * m + m / LPF->QualityFactor + 1);
}
PWM调制发波
DPLL_LOOP(Uac);
float wt = HPLL.wt + PFC.offset;
float phase = sinf(wt);
// // DAC output theta
EALLOW;
DacbRegs.DACVALS.bit.DACVALS = (uint) ((phase + 1) * 1241);
EDIS;
static int i = 0;
// 电压外环闭环控制
if (i >= 250)
{
pid_Udc.ActualValue = Udc;
// Ref = 0.6;
Ref = PID_Control_Pos(&pid_Udc, 1); // within limit
Ref = 0.8 * Ref;
i = 0;
}
i++;
pid_Iac.SetValue = Ref * phase;
pid_Iac.ActualValue = Iac;
float temp = PID_Control_Pos(&pid_Iac, 1); // positional PID control
// generate modulate wave spwm
ModulateWave = (-temp + Uac + Ref * cosf(wt) * 0.15 * PI); // - 0.2 * PI * spll1.cos[1]); //- 0.34 * PI * spll1.cos[1]; // 调制波
float temp1 = (0.5 * (tbprd + tbprd * 0.008 * ModulateWave));
float temp2 = (0.5 * (tbprd - tbprd * 0.008 * ModulateWave));
// limit modulate wave // 限幅考虑死区时间的占空比
if (temp1 > 0.98 * tbprd)
temp1 = 0.98 * tbprd;
if (temp1 < 0.02 * tbprd)
temp1 = 0.02 * tbprd;
if (temp2 > 0.98 * tbprd)
temp2 = 0.98 * tbprd;
if (temp2 < 0.02 * tbprd)
temp2 = 0.02 * tbprd;
// assign modulate wave
EPwm2Regs.CMPA.bit.CMPA = (uint) temp1;
EPwm3Regs.CMPA.bit.CMPA = (uint) temp2;完整工程代码链接
https://download.csdn.net/download/xht2403267701/86326992?spm=1001.2014.3001.5503
















 1258
1258











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











