







1. 技术概览
1.1. 工作原理
雷达的工作原理类似于声波反射。雷达使用电磁能脉冲(在无线波频谱中),发射源发射无线电波,无线电波被表面反射后,会被接收器系统接收和处理。反射波被捕获并处理,确定目标物体的距离、速度和方向。
1.2. 雷达的构造
如今,典型的车载雷达模块包含五个主要功能模块:天线、RF部分包括发射器和接收器、高速数字接口、信号处理器、和电源部分。
-
发射器:使用波形发生器产生雷达信号,并由放大器供电
-
波导:有利于传输发射器产生的雷达信号
-
天线:将发射器的能量作为电磁波传输到空气中
-
接收器:放大和解调接收到的信号
-
信号处理器:处理捕获的信号以计算距离、速度和其他有用信息
汽车雷达系统有垂直或水平天线。垂直极化是最常用的方法,因为它提供的杂波较少,但由于垂直天线的辐射方向图较窄,因此其方位角FoV有限。水平极化天线可以实现更宽的方位角FoV,但会在最终目标图案中引起更多的波纹。
RF CMOS是用于汽车雷达芯片组的最优选技术。RF CMOS是一种集成电路技术,可以简单且经济高效地将RF、模拟和数字组件集成到芯片组上。用于汽车雷达传感器的通常配置是将所有RF组件(发射器和接收器)放在一个PCB上,而将信号处理单元放在另一个PCB上。也可以将两者放置在同一芯片组上,但这会带来发热的问题,信号处理单元和RF组件都会产生大量热。随着半导体技术的进步,一些新兴公司提出了片上雷达(RoC)解决方案,该解决方案将RF组件和处理单元都封装在一个芯片组上,从而减少了组装和功耗。
1.3. 汽车为什么需要雷达
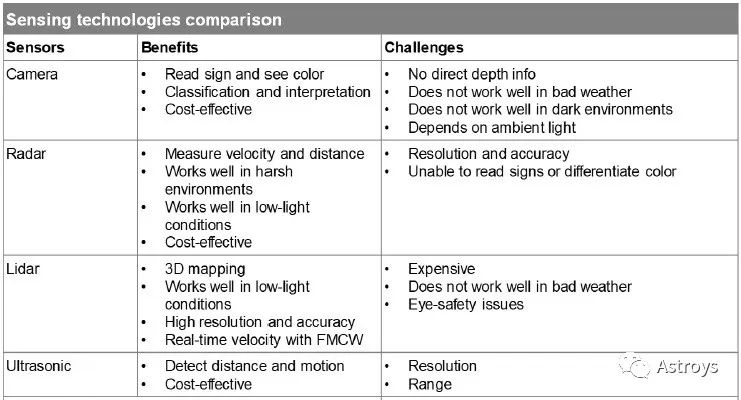
自动驾驶车辆需要多种传感技术来实现无误的传感和感知。每种传感技术(摄像头、雷达或激光雷达)都有其独特的功能,它们可与其他传感器互补,创建可靠的传感套件,确保自动驾驶车辆的安全运行。
基本上,所有上述传感技术都在电磁光谱的不同波长下运行。摄像头使用可见光,因此,它在低光照或高对比度照明条件下,性能会有限制。激光雷达使用的光波不在正常的可见光谱范围内,但在明亮的阳光和恶劣的天气条件下也会受到限制,从而导致信噪比降低。此外,与摄像头或雷达相比,高分辨率激光雷达技术仍然昂贵且不够成熟。
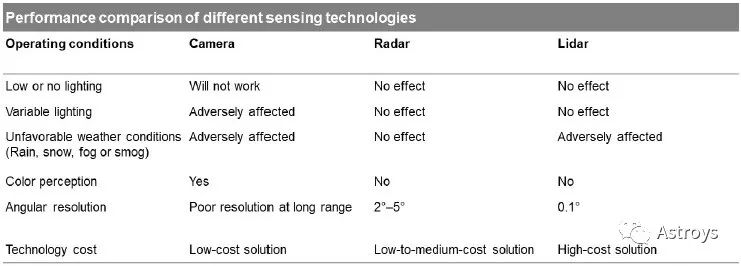
雷达使用无线电波,不受光照条件的影响。它们可以轻松穿透雨雪环境,并在恶劣的天气条件下表现良好。雷达还可以轻松计算出移动物体的距离、速度和轨迹。雷达的另一个主要优点是它能够透视物体并检测车辆上方或后方的障碍物。但雷达的主要缺点是分辨率低,例如识别两个距离很近的物体。
雷达系统尺寸较小,部署成本低得多。就价格而言,雷达是仅次于激光雷达的自动驾驶汽车第二昂贵的传感器类别,其次是摄像头。由于与雷达相关的所有技术优势,目前在道路上行驶的几乎每辆具有自动驾驶功能对车辆都配备了某种雷达。但雷达仍需要其他传感器来弥补其局限性。
由于每种感知技术都有其自身的优缺点,因此自动驾驶汽车不太可能仅依靠一种感知技术。大多数OEM和自动驾驶公司正在使用多种传感器技术来解决自动驾驶汽车的感知问题,并根据其特定的部署需求采用最合适的解决方案。
2. 功能与应用范围
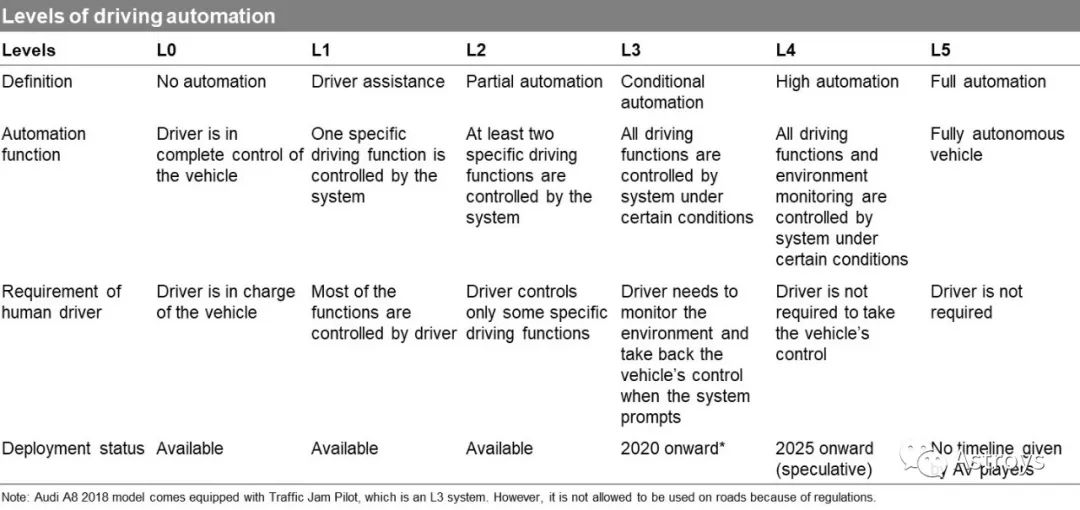
2.1. SAE自动驾驶级别
SAE International已定义了从L0到L5的六个不同自动驾驶级别。随着级别的增加,自动驾驶程度逐渐升高,其中L0没有自动驾驶功能,而L5则是完全自动驾驶。
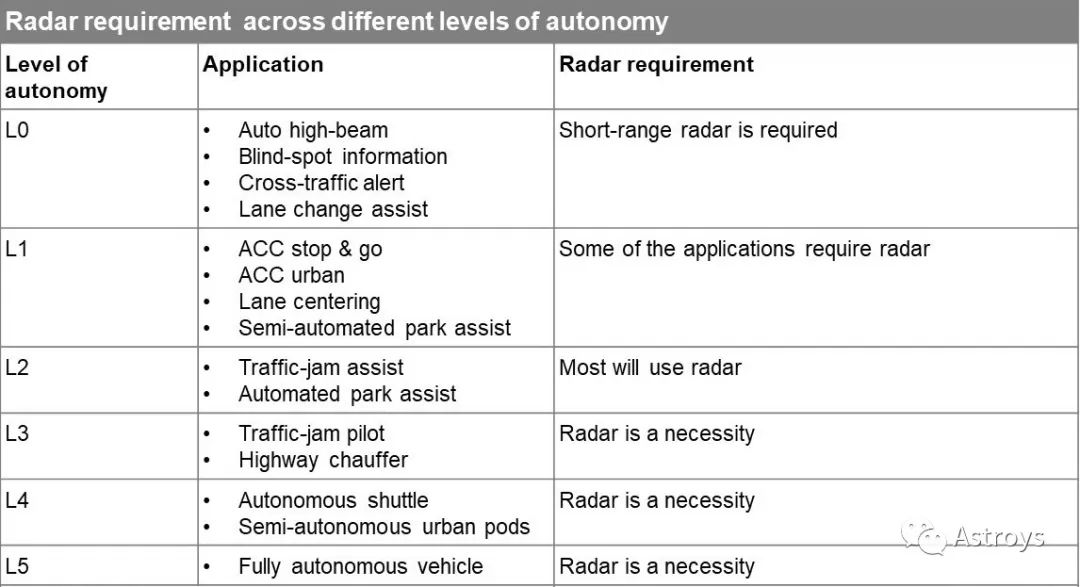
2.2. 跨不同自动驾驶级别的雷达要求
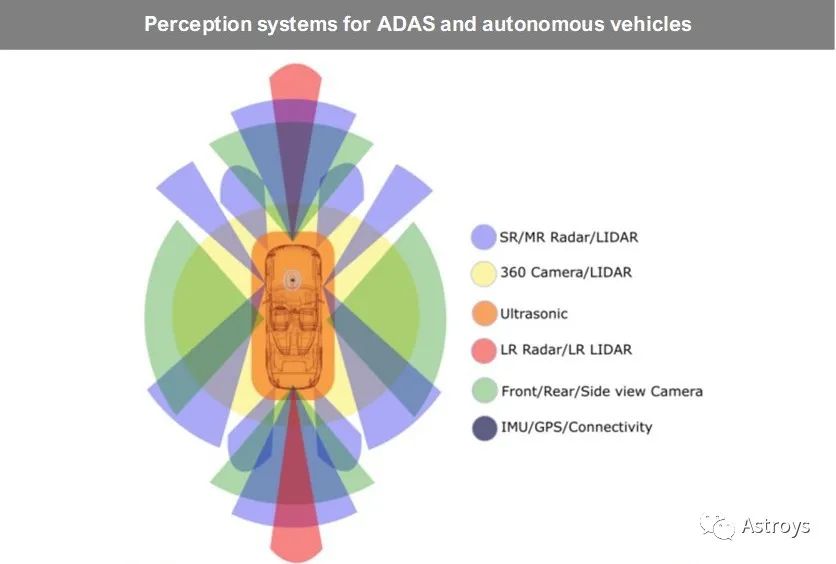
上图说明了ADAS和自动驾驶应用所需的不同传感技术。为了实现不同的驾驶员辅助系统,甚至是半自动和全自动驾驶,不同的OEM会采用不同的传感器配置。
随着主动安全和ADAS技术的日益普及,以及自动驾驶技术的发展,正在部署各种传感技术以实现平稳可靠的运行。雷达已经在车辆中使用了十多年,以确保为消费者提供舒适和安全的驾驶体验。
最初,雷达曾经很慢、笨重且昂贵。但随着技术的进步,雷达供应商带来了性能更高、价格更低的集成雷达解决方案。大多数ADAS严重依赖雷达和基于视觉的传感技术。由于视觉系统仅限于摄像头的视野,并且在不利的天气条件下性能受到限制,因此雷达在能见度低和复杂驾驶情况下提供了必要的感知度。
雷达的ADAS用例:
-
短程雷达:盲点检测、变道辅助、ACC的stop&go功能、停车辅助(倒车和前进)、后方交叉路口警报和碰撞警告。
-
远程雷达:ACC、AEB系统、半自动停车辅助系统。
对于L2及更高级别的自动驾驶,没有一种传感技术可以达到目的。对于更高的自动驾驶级别,多种传感技术是在车辆周围启用360度安全茧的前提。雷达与摄像头、激光雷达和超声波传感器一起,可以在每种工作条件下进行物体检测和分类。传感器冗余和传感器融合对于确保安全关键的功能都至关重要。
3. 关键参数——频段
汽车雷达的设计工作范围超出了传统的2-18GHz军用雷达系统的范围,通常工作在24GHz和76–81GHz频段。这些频段进一步分为以下其他频段。
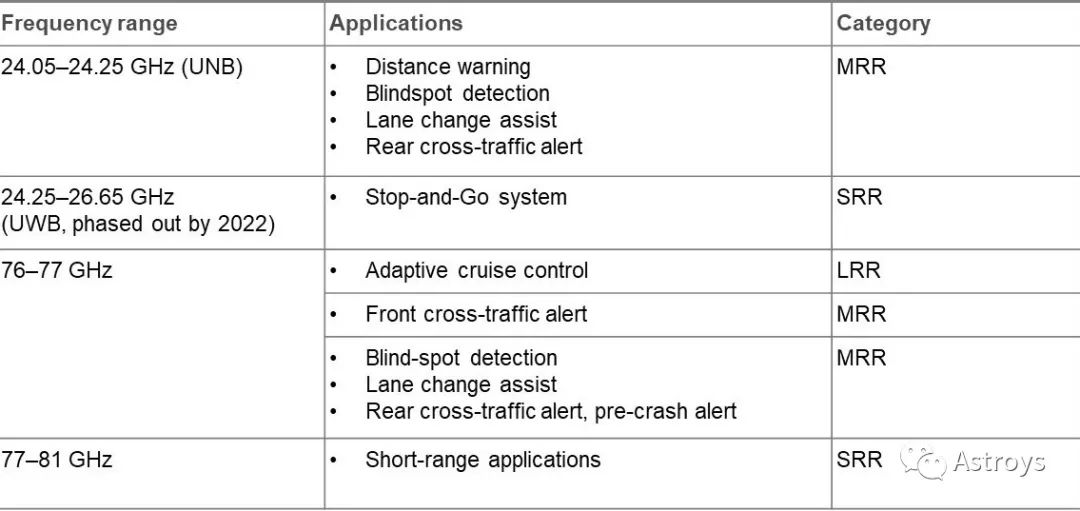
3.1. 24GHz
24GHz频段包括两个频段:
- 24.05–24.25GHz(UNB)
该频段包括从24.05-24.25GHz的工业、科学和医疗(ISM)频段,也被称为超窄带(ultra-narrow band-UNB)。该频段未经许可,已在传统的汽车雷达中广泛使用。它支持短距离功能,例如盲点检测、短距离预警,接近障碍物预警和变道预警系统等。
- 21.65–26.65GHz(UWB)
UWB的总带宽为5GHz,这也主要用于传统雷达中。由于其分辨率比UNB更好,因此UWB通常用于类似UNB的短距离应用。
到2022年,将逐步淘汰24GHz UWB频段,为更广泛的77GHz频段用于汽车应用铺平道路。
3.2. 77GHz
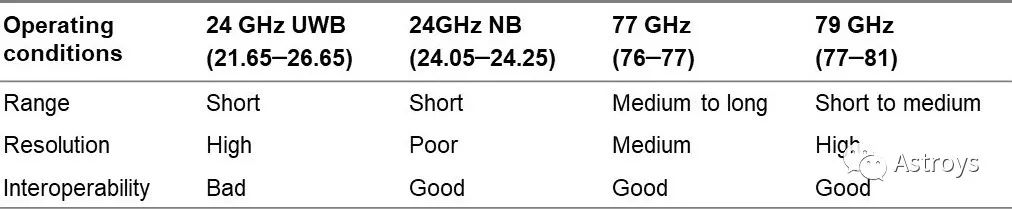
77GHz雷达频段包括5GHz总带宽的一部分,范围是76-81GHz。远程雷达(LRR)在76–77GHz范围内总共占用600MHz带宽。中程雷达(MRR)在77-81GHz的600MHz带宽内,而扫频短程雷达(SRR)可以访问77-81GHz的4GHz总带宽。
在77GHz下工作的汽车雷达为远程物体检测提供了更高的分辨率,并具有足够的带宽甚至在近距离下也可以支持高分辨率。例如,在76-77GHz的1GHz带宽下的短距离雷达可以提供约0.5m的分辨率,而在77-81GHz的4GHz带宽下的另一种近程雷达可以提供约0.1m的分辨率。下表比较了各种频段带宽的范围、分辨率和互操作性。
3.3. 从24GHz转向77GHz
汽车雷达传统一直使用24GHz频段,但包括ETSI(欧洲)和FCC(美国)在内的全球频段监管机构已宣布,到2022年将逐步淘汰UWB带宽,此后只有UNB频段可用用于汽车应用。缺乏宽带宽以及对汽车雷达应用中更高性能的要求,导致汽车雷达公司转向77GHz(76–81 GHz)频段。
由于以下几种原因,全球汽车雷达生态系统正在向77GHz频段转变:
-
与较长波长相比,短波长的高频率由于降雨、积雪、灰尘颗粒的散射而遭受的传播损失较小。
-
短波长(与24GHz频段相比,波长短于77GHz的三分之一)可以使用较小的雷达组件,例如收发器和天线,从而减小了雷达的外形尺寸,易于在车身中安装和隐藏。
-
与行驶中的车辆一样,较短的77GHz波长也更能抵抗冲击和振动的影响,从而提高了检测精度。
-
77GHz频段可提供更高分辨率的远程目标检测,从而支持更高级别自动驾驶的要求。更高的范围和速度分辨率使传感器能够有效区分间距较小的物体,提高ADAS的性能和高度自动驾驶功能。
3.4. 监管框架
汽车应用需要更统一的国际雷达频段,这使得包括FCC(美国)和ETSI(欧洲)在内的监管机构都留出了76-81GHz频段。这也导致取消了汽车应用UWB频段的授权。
3.5. 欧洲
随着雷达在汽车行业的应用日益广泛,欧盟于2017年决定对汽车雷达频段进行规范,并据此制定了以下规定:
-
欧洲电信标准协会(ETSI)宣布,2022年1月1日之后,UWB(21.65–26.65GHz)将不再用于汽车应用。
-
77-81GHz之间的频段范围将称为79GHz。
-
雷达传输的最大平均功率密度应为3dBm/MHz,峰值限制为55dBm。
-
一个短程雷达在车辆外部的最大平均功率密度不得超过9dBm/MHz。
3.6. 美国
联邦通信委员会(FCC)也宣布取消了汽车应用UWB频段的授权。根据公告,从2022年1月1日起,21.65-26.65GHz的5GHz频段将不再在美国用于汽车应用。
FCC还为汽车雷达应用在76–81GHz频段中预留了总计5GHz带宽。在此频段内,LRR在76-77GHz范围内占用600MHz带宽。MRR也占用了77-81GHz的600MHz带宽,而扫频SRR应用则可以访问77-81GHz的4GHz带宽。
在美国,雷达必须遵守FCC第95部分的规则和规定。为了获得认证,雷达必须先对RF性能和发射水平进行一系列广泛的测量,然后才能部署到车辆中。
3.7. 小结
将汽车雷达频率转换到整个76-81GHz频段将产生可支持LRR和SRR应用的国际统一频段。此外,专用汽车雷达频段的可用性将减少对其他雷达系统潜在干扰的可能。这种分配使全球的雷达供应商和OEM可以利用频段协调所带来的规模经济优势。预计这将进一步降低成本,并推动雷达在汽车中的广泛应用。
4. 关键技术——调频
雷达调频技术在确定雷达性能方面起着至关重要的作用,因此它会根据应用场景而变化。两种最常用的调频技术是调频连续波(FMCW)和脉冲多普勒技术。两种技术均可在24GHz或77GHz频段的汽车应用中使用。
4.1. FMCW
基于FMCW的雷达系统发送和接收连续信号,这些信号随时间线性变化,所发射的波称为啁啾。发射和接收天线彼此分开,防止发射和回波信号的干扰。该系统可以同时精确地测量距离和相对速度。
汽车FMCW雷达通常使用啁啾调频波形,频率从77GHz线性增加到77.8GHz。信号瞬时频率差的测量给出了距离信息。汽车雷达也越来越多地使用多输入多输出(MIMO)技术来增加天线的有效接收截面(孔径)。这大大提高了响应解析目标位置的能力。
4.2. 脉冲波技术
脉冲多普勒雷达架构采用传统方法,即在短时间内(脉冲重复间隔-PRI)在整个区域内传输具有高峰值功率的短脉冲。脉冲多普勒雷达可以轻松地在大杂波背景下检测出小幅度移动目标。
脉冲多普勒雷达可以使用单天线进行发送和接收,从而可以有效地进行远距离目标检测,且具有较高的分辨率。但所需的峰值发射功率非常高。发射和接收模式之间的切换会导致检测中出现盲区,因此脉冲多普勒雷达更适合于远距离应用,而不是中距或短距应用。
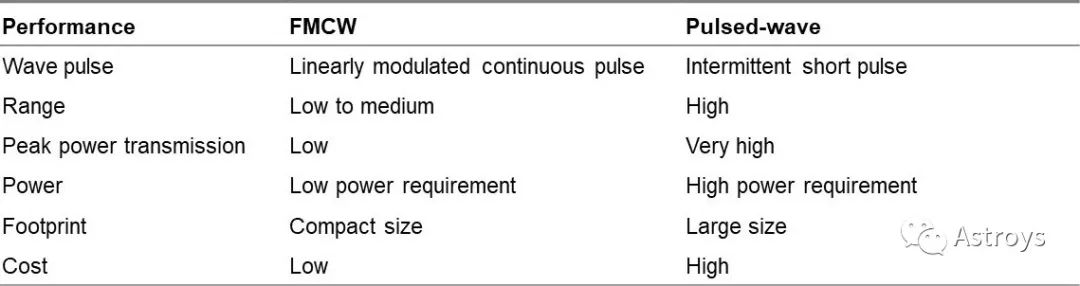
脉冲多普勒雷达的工作原理是接收信号和发射信号之间的时间差。在电子系统中,由于测量频率变化比测量时差要容易得多,因此FMCW成为汽车应用中的首选传感器类型。此外,在脉冲多普勒的情况下,最小可观察距离大于FMCW,这不利于汽车应用。
FMCW传感器需要更快的实时处理,而目前的处理器可以轻松解决此类处理所需的复杂数学计算,而且这些处理器价格也不贵,这使得FMCW更加适合于汽车应用。
5. 需求定位与配置
汽车雷达传感器可分为:短距雷达(SRR),中距雷达(MRR)、远距雷达(LRR)。
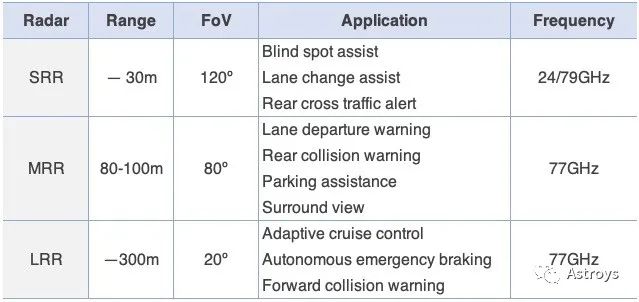
每个雷达传感器都有其特定的应用,并且所有这些雷达传感器的组合都用于ADAS和自动驾驶应用。
不同的公司采用SRR、MRR和LRR的不同配置以及其他传感技术来达到所需的感知水平。例如,SRR可以在100°–120°范围的FoV中检测车辆的周围环境,而LRR可以在20°的窄FoV下检测长达300m距离的道路。
在定位方面,主要雷达应用可分为角雷达和前向雷达。角雷达安装在车辆的后部和前部两侧,并且大多是SRR。前向雷达通常为MRR和LRR,安装在车辆的格栅和前保险杠上。
对于L2,大多数OEM选择了至少三个具有不同配置的雷达,到L3就会增加到5个雷达。下表重点介绍了不同自动驾驶级别的不同雷达配置。
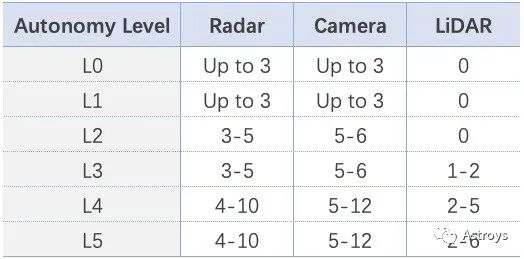
为了实现更高的自动驾驶水平,例如L4和L5,将在车身周围配备4-10个雷达以及至少2个激光雷达。更高的自动驾驶水平将需要多种传感技术,以及重叠的覆盖范围(360度茧),以实现所需的可靠性和冗余度。

















 467
467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









