







导语:Multi-View Stereo (MVS) 多视图立体匹配与三维重建的任务是:以已知内外参数的多幅图像(SfM的结果)为输入,重建出真实世界中物体/场景的三维模型。
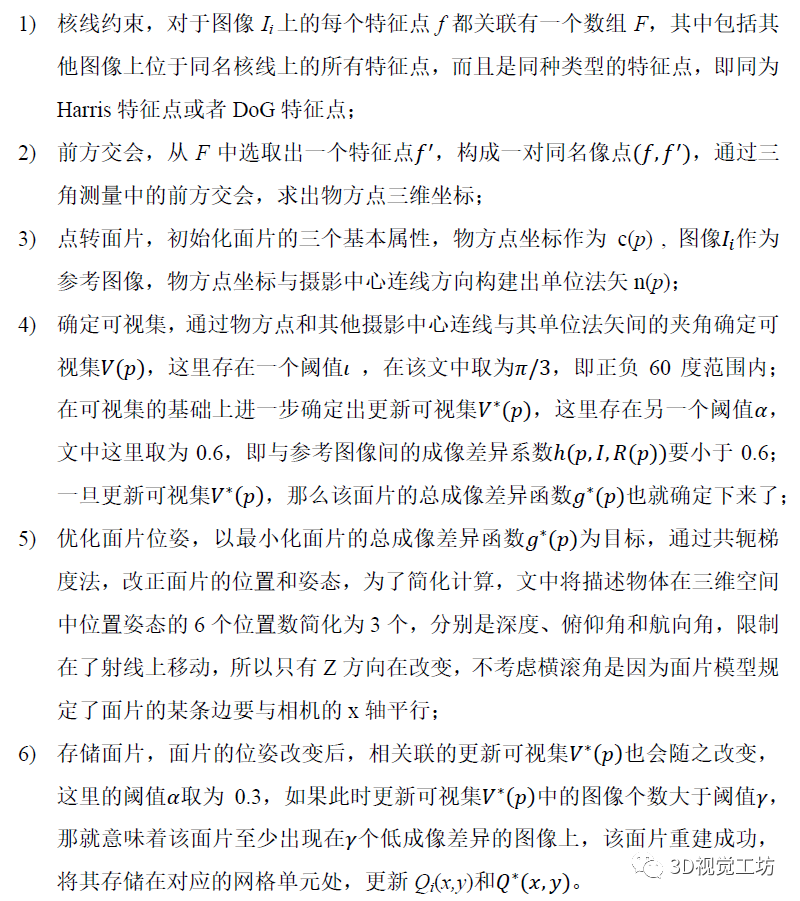
本文作者提出了PMVS的经典算法,深入了解传统算法的实现效果,可以帮助我们与基于深度学习的方法进行对比,对“如何评估多个视图间相似性”这一问题有更深刻的认识,希望能对相关研究人员有一定的参考帮助。
论文题目:Accurate, Dense, and Robust Multiview Stereopsis
论文地址:Accurate, Dense, and Robust Multiview Stereopsis | IEEE Journals & Magazine | IEEE Xplore
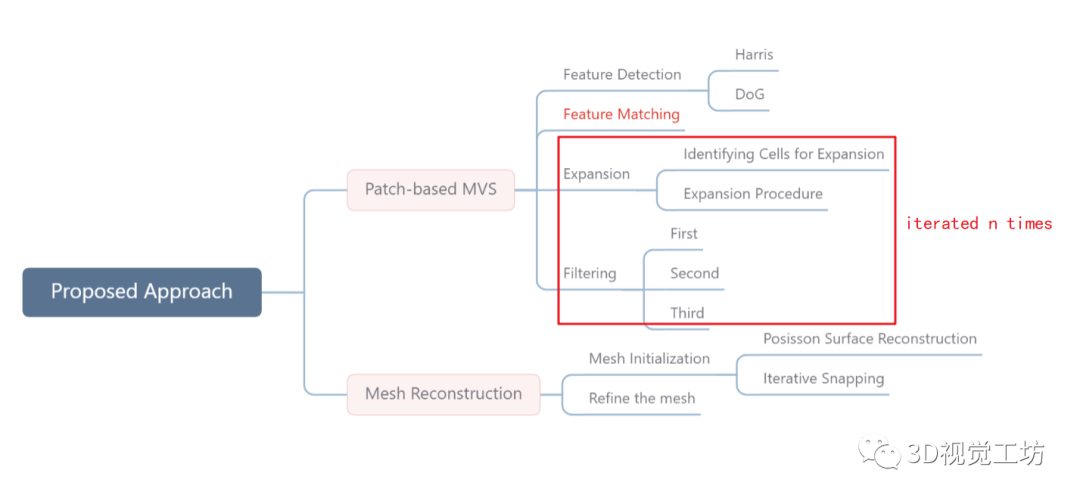
该论文提出的方法可以分解为三个主要的部分:
1. 重建出若干可以完整覆盖目标物体/场景的面片;
2. 将面片模型转换为多边形渔网模型;
3. 优化多边形渔网模型。
这里重点分析文中提出的“匹配-扩张-剔除”策略,这也是PMVS算法的核心内容。
算法效果如下图所示,从左到右依次为输入图像(不同角度共48张),特征点提取,特征匹配结果,扩张剔除迭代3次后效果,转换为网状模型效果。

1. 基本模型
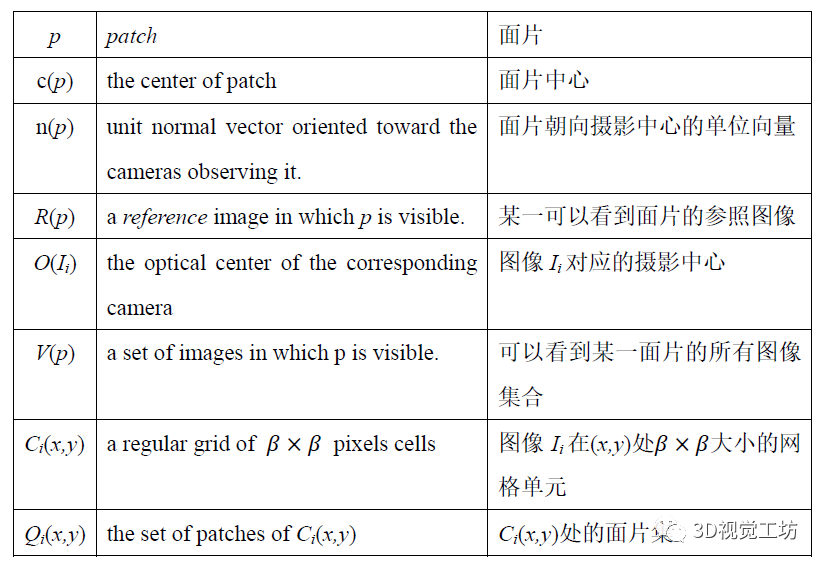
基本模型中提及的符号含义
1.1. 面片模型
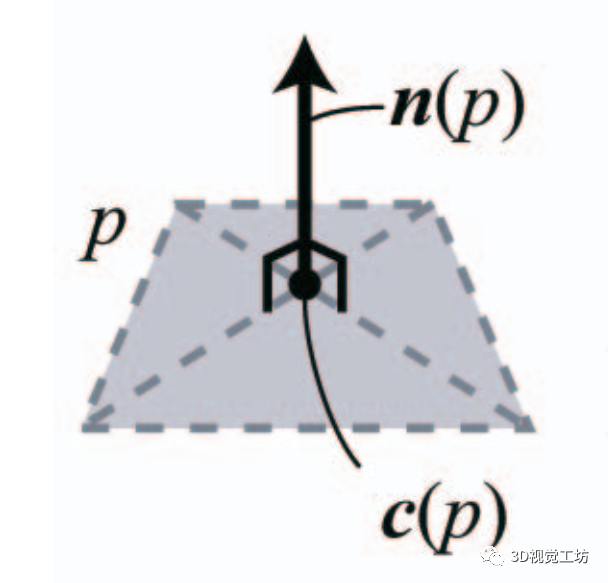
先来了解什么是面片模型 (Patch Model),所谓面片,是指三维物体表面的局部切平面,可以近似地表示某一局部范围内的三维物体表面,与数学中在某一范围内用切线研究曲线的做法一致,都是“将非线性函数线性化来近似处理”的思想。本质上看,一个面片是三维空间中的一个矩形,由其中心点、单位法向和参考图像三者共同确定,中心点c(p)是其对角线交点的坐标,单位法向n(p)是从中心点指向参考图像 R(p) 对应的摄影中心的单位向量,这里之所以要引入参考图像的概念,是因为一个面片会在多幅图像中出现,选定其中的某一图像作为该面片的参考图像,将包含该面片的所有图像组成的集合V(p)称为该面片的可视集。
(思考:如何确定一个面片的可视集并从中指定其参考图像?)
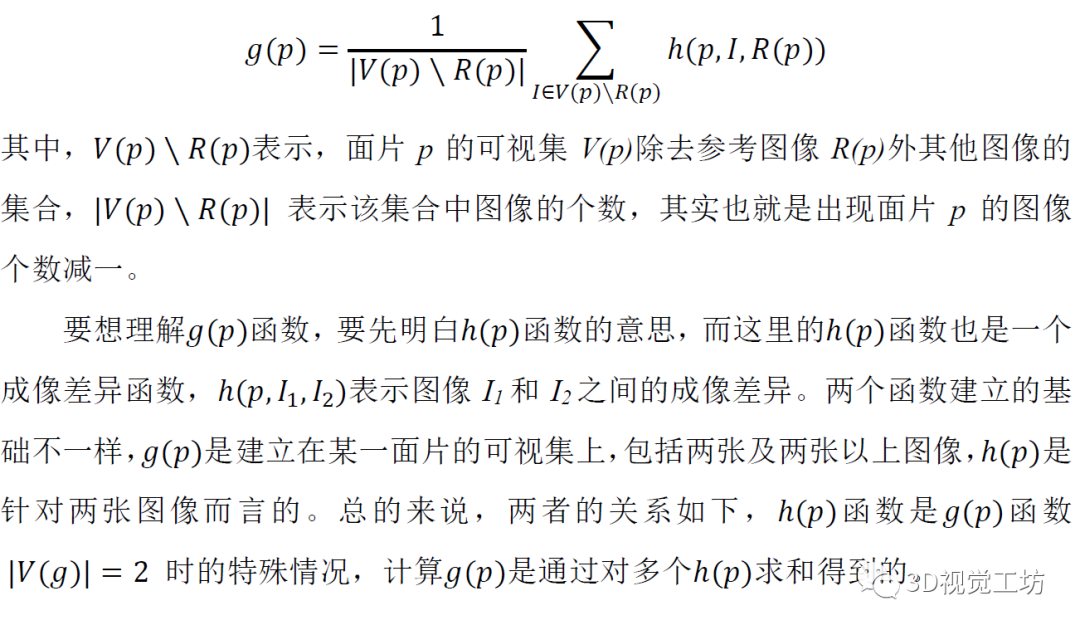
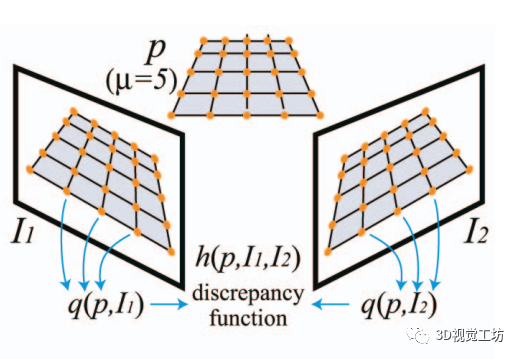
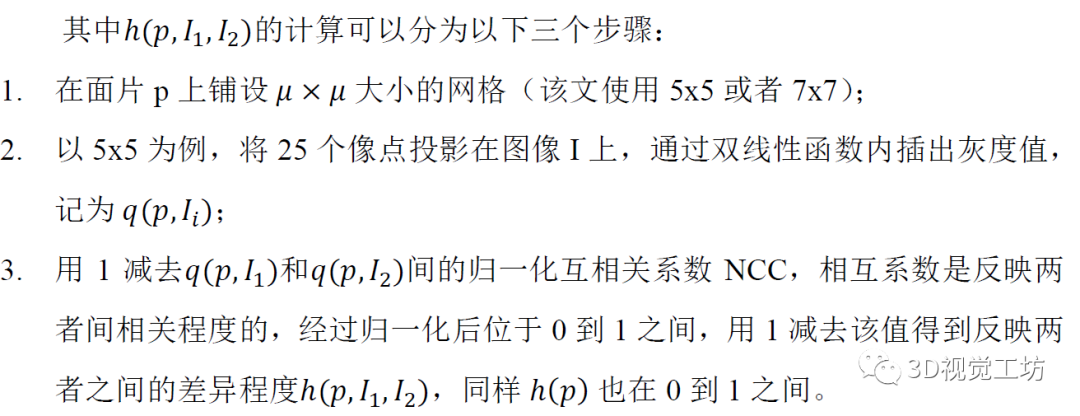
1.2. 成像差异函数
接着作者在面片可视集的基础上引入了成像差异函数 (Photometric Discrepancy Function) 的概念,或者叫灰度差异函数。
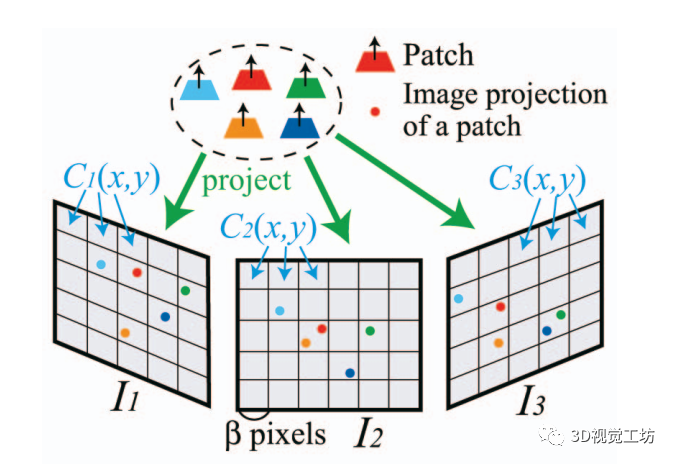
1.3. 图像模型
基于面片的表面表示方式最大的优势是其灵活性,但缺少面片与面片之间的连接信息,这使得寻找邻近面片,面片规整等操作实现起来较复杂,为此引入图像模型 (Image Model),建立起重建出的面片和其可视图像上投影间的联系。具体的讲,将每张图像分割为β×β的网格单元Ci(x, y),在第i张图像的(x, y)处存储一个数组Qi(x, y),其中包含投影在该网格单元上的所有面片信息。
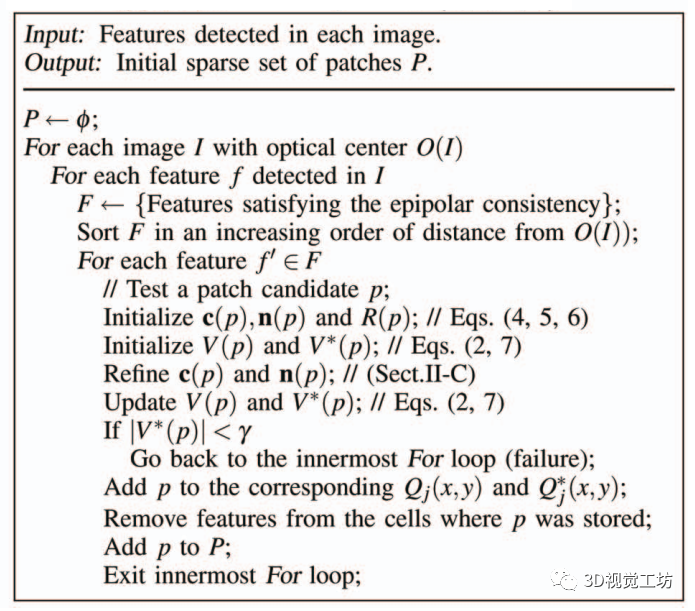
2. 初始面片生成
该论文提出的多视图匹配三维重建方法,可以分为初始面片生成、面片加密、面片剔除三部分,经过初始特征匹配得到一组稀疏的面片集合,然后通过反复加密、剔除面片的过程得到最终的结果。每幅图像通过Harris和DoG算子提取出特征点后,进入到特征匹配阶段,这是PMVS算法的核心内容,思路如下:

3. 面片加密
经过上述的特征匹配后,重建出了一组稀疏的面片,接下来通过已有的面片在周围空处生成新的面片进行加密,期望达到的效果是每个图像网格单元上都至少包含有一个面片。首先,对于一个面片p,明确其周边可以扩张的网格单元,然后按照某种扩展策略进行扩展,具体思路如下:
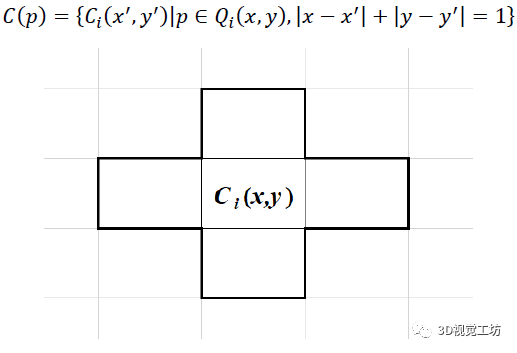
3.1. 确定可扩张网格单元
存在面片p的网格单元Ci(x, y),根据下式,将其上下左右四个网格单元视作邻近网格单元,但并非每个邻近网格单元都是可扩张的网格单元,还需要满足两个基本条件。
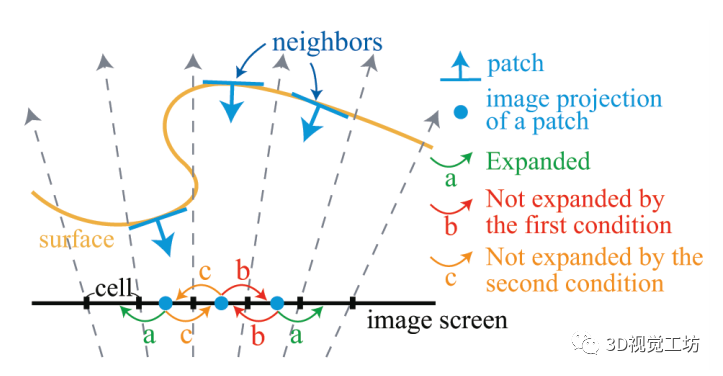
第一个条件:该网格单元中不存在邻近面片p’,邻近面片的判定条件如下,意思是说两个面片中心点的距离不能过大,且两个面片的朝向不能偏差很大。

第二个条件是作者从深度方面考虑的,扩张出的面片p’和面片p对应的实际深度不能相差过大,但是实际的深度要在完成三维重建的过程后才能知道,这里就进入了一个“鸡生蛋”的逻辑死循环中,该论文中作者在这里仅做了一个简单的处理,判断两者间的成像差异函数。
简单总结一下,结合下图,在确定可扩张的网格单元时分为三种情况,没有面片时(绿色箭头a)进行扩张;有面片且为邻近面片时(红色箭头b)没有必要扩张;
有面片但非邻近面片时(橙色c)需要进一步判断成像差异系数,若小于给定阈值没必要扩张,大于给定阈值则扩张。
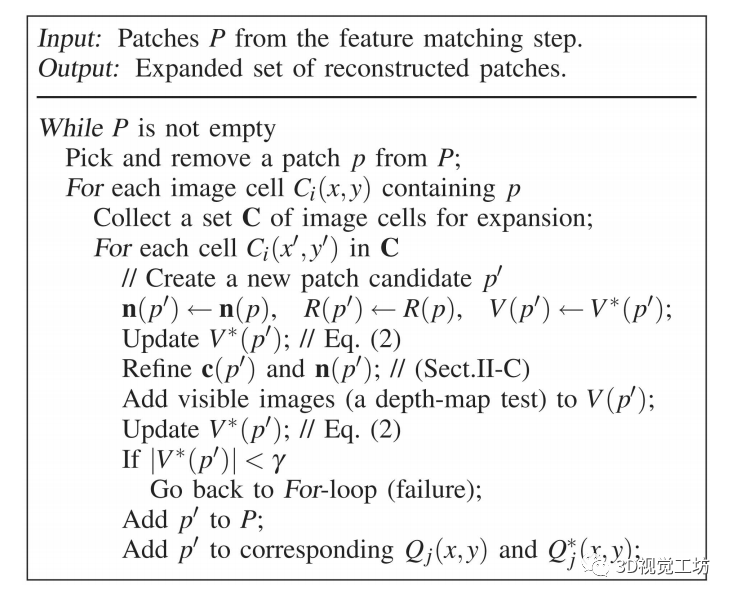
3.2. 扩张策略
在明确了哪些网格单元可以扩张后,接下来的问题就是如何根据已有的面片构建出新的面片了,思路如下:
4. 面片剔除
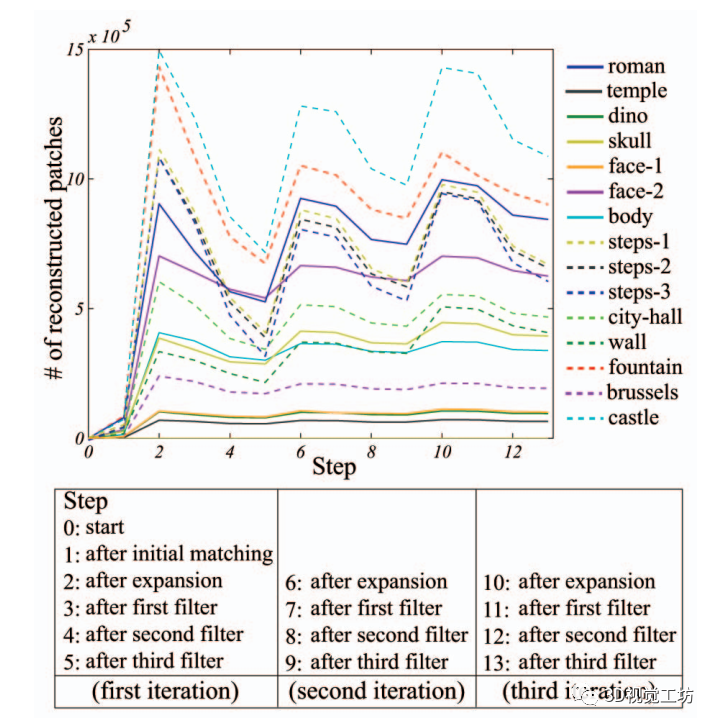
在扩张的过程中,为应对那些变化较大、较难重建的区域,调大了成像差异的阈值,但与此同时不可避免地会出现一些冗余、灰度差异大等低质量的面片,在这一步中进行剔除,“扩张-剔除”的操作需要迭代进行若干次(该论文中统一进行3次),每次剔除分三步进行,每步的侧重不同,前两步从成像一致性/灰度一致性入手,第三步强调面片间的关联性。第一步剔除掉出现在同一个网格单元中,但并非邻近面片的粗差情况;第二步通过视差图测试,剔除掉那些较少图像上能看到的面片;第三步,剔除掉在相邻网格单元中相邻面片个数占总面片数小于1/4的面片。
下图表示了整个算法过程中面片的个数变化,通过“扩张”后面片个数急剧增加,然后通过三种策略剔除较差的面片,面片数不断减少,再进行下一次的“扩张-剔除”。


可以看出,除了重复纹理区域(人的头发)、凹陷部分、深度突变区域外,重建的整体效果还是不错的,这得益于“匹配-扩张-剔除”策略的成功,成像差异函数的提出是立体匹配从双目走向多视图的关键,可视集V(p)在极线约束下利用几何信息,更新可视集V*(p)进一步考虑灰度信息,在深度学习出现后,已有论文实现通过学习的方式来评估多个面片间的相似性。

















 2095
2095

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









