







1.专业名词概念
1.1GNSS
GNSS的全称是全球导航卫星系统(Global Navigation Satellite System),它是泛指所有的卫星导航系统,包括全球的、区域的和增强的,如美国的GPS、俄罗斯的Glonass、欧洲的Galileo、中国的北斗卫星导航系统,以及相关的增强系统,如美国的WAAS(广域增强系统)、欧洲的EGNOS(欧洲静地导航重叠系统)和日本的MSAS(多功能运输卫星增强系统)等,还涵盖在建和以后要建设的其他卫星导航系统。国际GNSS系统是个多系统、多层面、多模式的复杂组合系统,如下图所示.

1.2TF
坐标变换,一般对于机器人,有两个最基本的变换,一个是机器人底盘跟激光雷达之间的变换,第二个是机器人底盘与里程计原点之间的变换。
1.3AMCL
AMCL(adaptive Monte Carlo Localization)自适应蒙特卡洛定位。
参考文献
1.4SLAM
simultaneous localization and mapping,即时定位与地图构建。即机器人自身位置不确定的情况下,在完全未知的环境中创建地图,同时利用地图进行自主定位和导航。
1.5启发式搜素
启发式搜索(Heuristically Search)又称为有信息搜索(Informed Search),它是利用问题拥有的启发信息来引导搜索,达到减少搜索范围、降低问题复杂度的目的,这种利用启发信息的搜索过程称为启发式搜索。
1.6增量式搜素
是指在相似的环境中进行一系列搜索时,通过重用技术来更快地得到最优路径的搜索方法。
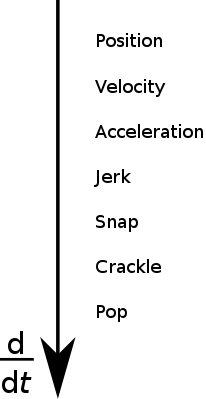
1.7Jerk
WiKipedia
1.8回归分析预测模型
1.9自回归移动平均模型
1.10马尔科夫预测模型
1.11灰色预测模型
1.12LSTM
1.8Kinodynamic 运动学与动力学合称
1993年在一篇名为《Kinodynamic motion planning》期刊论文中被提出,但局限于当时计算机处理和运算的能力,近几年Kinodynamic概念才作为一个研究热点进入研究者的视线。
2.参考文献
2.1算法控制策略需要考虑平台的可行性
算法提供的控制策略也未充分考虑应用在农机平台的可行性,使得现阶段传统路径规划算法或其改进版无法适用于农机工作平台。
——刘宇峰, 姬长英, 田光兆, 等. 自主导航农业机械避障路径规划 [J]. 华南农业大学学报, 2020, 41(2): 117-125
2.2避障后合理地回归原始工作路径
规划的路径指导自主导航农业机械在工作过程中以尽量小的避障代价实现障碍物的避障,并在避障完成后合理地回归原始工作路径,因此,自主导航农业机械避障路径规划的研究具有很强的实际意义。
——刘宇峰, 姬长英, 田光兆, 等. 自主导航农业机械避障路径规划 [J]. 华南农业大学学报, 2020, 41(2): 117-125
3.3单障碍物避障路径规划算法
- 判断障碍物的威胁性
- 避障安全距离的计算
- 避障最大转弯半径的确定
- 路径规划(考虑到自主导航拖拉机在偏转角控制上存在一定的滞后与误差,因此在避障路径的规划过程中应尽量减少偏转角变化的次数,即机器人当前所在路径的曲线的导数尽量少改变)
- 避障代价的计算
- 避障总行驶路径的计算
——刘宇峰, 姬长英, 田光兆, 等. 自主导航农业机械避障路径规划 [J]. 华南农业大学学报, 2020, 41(2): 117-125
3.视频资料
3.1无人机杂耍球
苏黎世联邦理工学院ETH Zurich在无人机平台验证了引入动力学与运动学约束可以提高无人机路径规划的执行效率。
4.环境搭建
1.Ubuntu 18.04 + ROS Melodic + TurtleBot3仿真
2.Gmapping TurtleBot3
3.IDE工具 c++:clion python:pycharm
4.gazebo: building editor可以创建仿真环境
5.gazebo加入动态障碍物
5.代码程序
1.重要变量
- $ROS_DISTRO
echo $ROS_DISTRO
可以输出ros的发行版本
2.ros navigation框架

sudo apt-get install ros-melodic-navigation
3. ros navigation 源码
参考文档
源码
note:ubuntu18.04选择melodic-devel版本,复制里面的文档到~/catkin_ws/src/目录中,然后catkin_make,配置好clion ros环境就可以进行源码的学习。
4.Hybrid A*
6.英语词汇
| 词汇 | 发音 | 释义 |
|---|---|---|
| resolution | [ˌrezəˈluːʃn] | n,分辨率;决议;解决;决心 |
| origin | [ˈɒrɪdʒɪn] | n,原点;起源;开端;出身 |
| interface | [ˈɪntəfeɪs] | n,接口;交界面;v,接合,连接;vi,相互作用;交流 |
| allocate | [ˈæləkeɪt] | vt,分配;拨出;vi,分配;指定 |
| iterate | [ˈɪtəreɪt] | vt,迭代;重复 |
| volumetric | [ˌvɒljʊˈmetrɪk] | adj,体积的 |
| velocity | [vəˈlɑːsəti] | n,速度 |
| trajectory | [trəˈdʒektəri] | n,轨迹;轨道;弹道 |
| deviate | [ˈdiːvieɪt] | vi,脱离;越轨;vt,使偏离 |
| generality | [ˌdʒenəˈræləti] | n,普遍性;大部分 |
| scalability | [ˌskeɪləˈbɪləti] | n,可扩展性;可伸缩性 |
| occupancy | [ˈɒkjəpənsi] | n,占有;占用 |
| specify | [ˈspesɪfaɪ] | vt,指定;列举 |
| inflate | [ɪnˈfleɪt] | vi,膨胀 |
| polygon | [ˈpɒlɪɡən] | n,多边形;多边形物体 |
| collision | [kəˈlɪʒn] | n,碰撞;冲突 |
| column | [ˈkɒləms] | n,列 |
| implementation | [ˌɪmplɪmenˈteɪʃn] | n,实现 |
| plane | [pleɪn] | n,平面;飞机 |
| kinematic | [ˌkɪnɪˈmætɪks] | adj,运动学的 |
| discretely | [dɪˈskriːtli] | adv,离散地,分离地 |
| oscillation | [ˌɒsɪˈleɪʃn] | 摆动,摇摆 |
7.算法
1.A*
2.Dijkstra
3.DWA
4.D*
5.PRM
6.RRT
7.APF
8.Hybrid A*
9.TEB
8.资源链接
Apollo 5.0 障碍物行为预测技术
TEB算法
DWA算法
ROS Navigation Stack
ROS源码阅读—局部路径规划之DWAPlannerROS分析
障碍物预测
强化学习导航
自动驾驶轨迹预测-综述

















 2159
2159











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











