







TUM数据集下载链接
https://vision.in.tum.de/data/datasets/rgbd-dataset/download
https://vision.in.tum.de/data/datasets/visual-inertial-dataset
 标定数据总共提供四种:
标定数据总共提供四种:
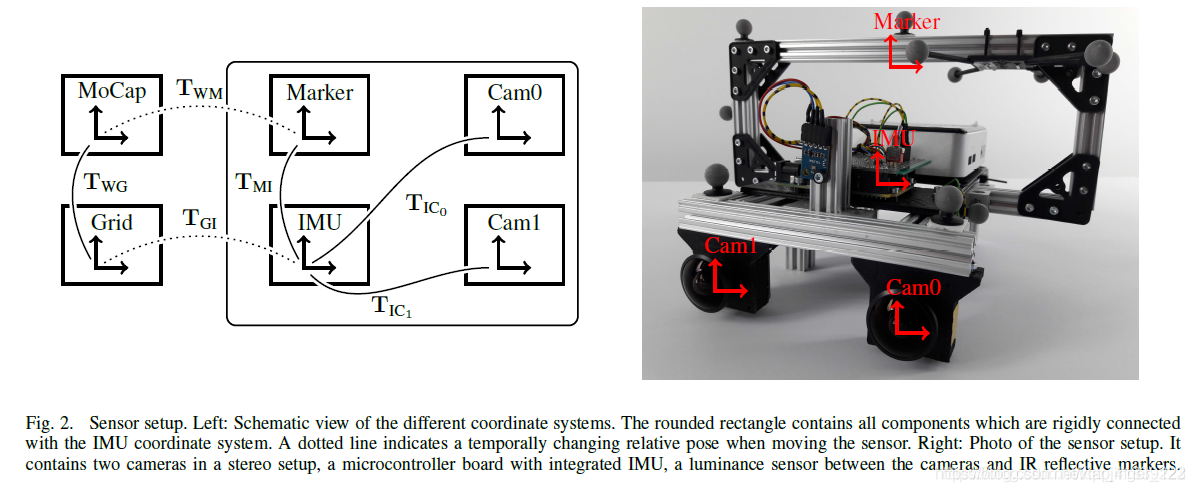
1.calib-cam1~8:相机标定,本质矩阵以及两个相机之间的姿态变换
2.calib-imu1~4:IMU标定,找到相机和IMU之间的最优姿态变换
3.calib-vignette2~3:光晕标定??
4.calib-imu-static2:IMU标定,只包含IMU数据,用于估计IMU噪声和随机游走。格式timestamp, gyro_x, gyro_y, gyro_z, accel_x, accel_y, accel_z, temperature
数据集序列总共5种:
1.corridor1~5(走廊):在走廊和几个办公室拍摄,只在开始和结束有真实值。
2.magistrale1~6(大厅):在校园内的一个大厅拍摄,只在开始和结束有真实值。
3.outdoors1~8(户外):在校园内的室外场景拍摄,只在开始和结束有真实值。
4.room1~6(室内):对应有5个图像序列,整个过程都带有运动捕捉系统提高的真实值。
5.slides1~3(滑梯):在大厅中拍摄,包含一段光照极差的路程,只在开始和结束有真实值。
由于 TUM数据集是从实际环境中采集的,需要解释一下它的数据格式(数据集一般都有自己定义的格式)。在解压后,你将看到以下这些文件:
- rgb.txt 和 depth.txt 记录了各文件的采集时间和对应的文件名。
- rgb/ 和 depth/目录存放着采集到的 png 格式图像文件。彩色图像为八位三通道,深
度图为 16 位单通道图像。文件名即采集时间。 - groundtruth.txt 为外部运动捕捉系统采集到的相机位姿,格式为
(time, t x , t y , t z , q x , q y , q z , q w ),
我们可以把它看成标准轨迹。
rgb和depth文件夹下存放着彩色图和深度图。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









