








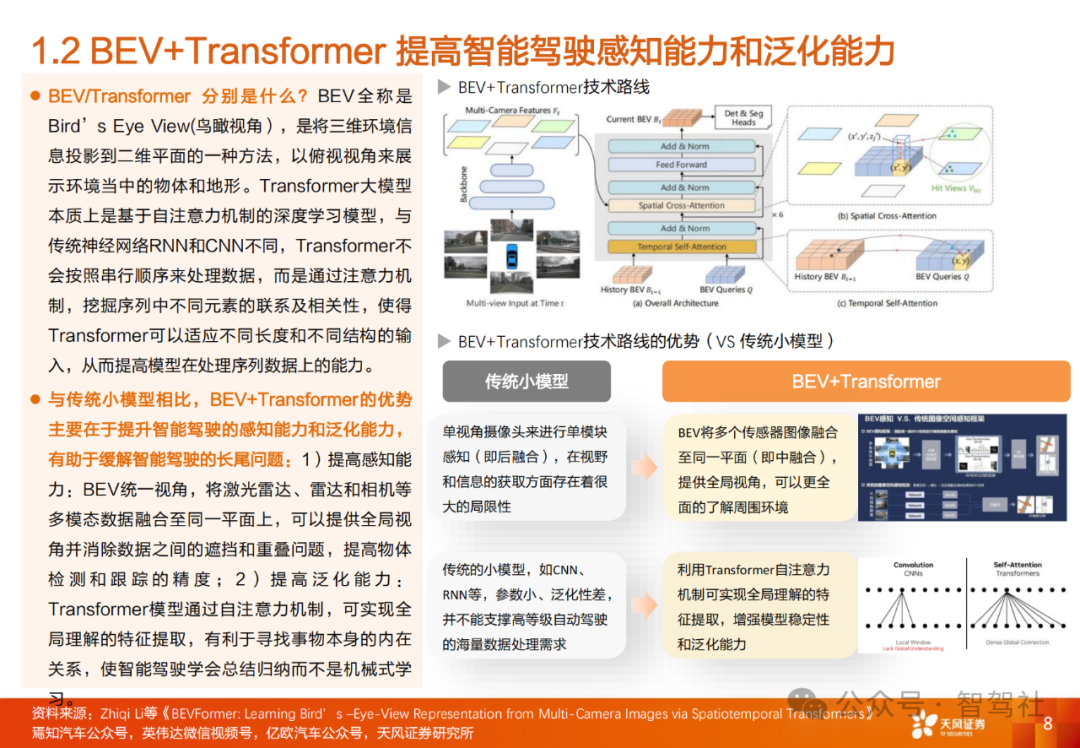
BEV+Transformer技术已成为自动驾驶领域的主流趋势,它通过整合多模态数据,提供全局视角,消除遮挡和重叠问题,从而提高物体检测和跟踪的精度。这种技术还通过注意力机制增强了智能驾驶的泛化能力,促使智能驾驶从机械式学习向总结归纳转变。
大模型的应用加速了自动驾驶辅助系统(NOA)的落地,并可能推动L3及以上级别自动驾驶技术的快速发展。云端大模型通过自动化标注、数据挖掘和仿真场景生成,提升了自动驾驶的迭代效率。同时,车端大模型在感知和预测环节的赋能,以及向决策层的渗透,预示着驾驶策略将从规则驱动向数据驱动转变。
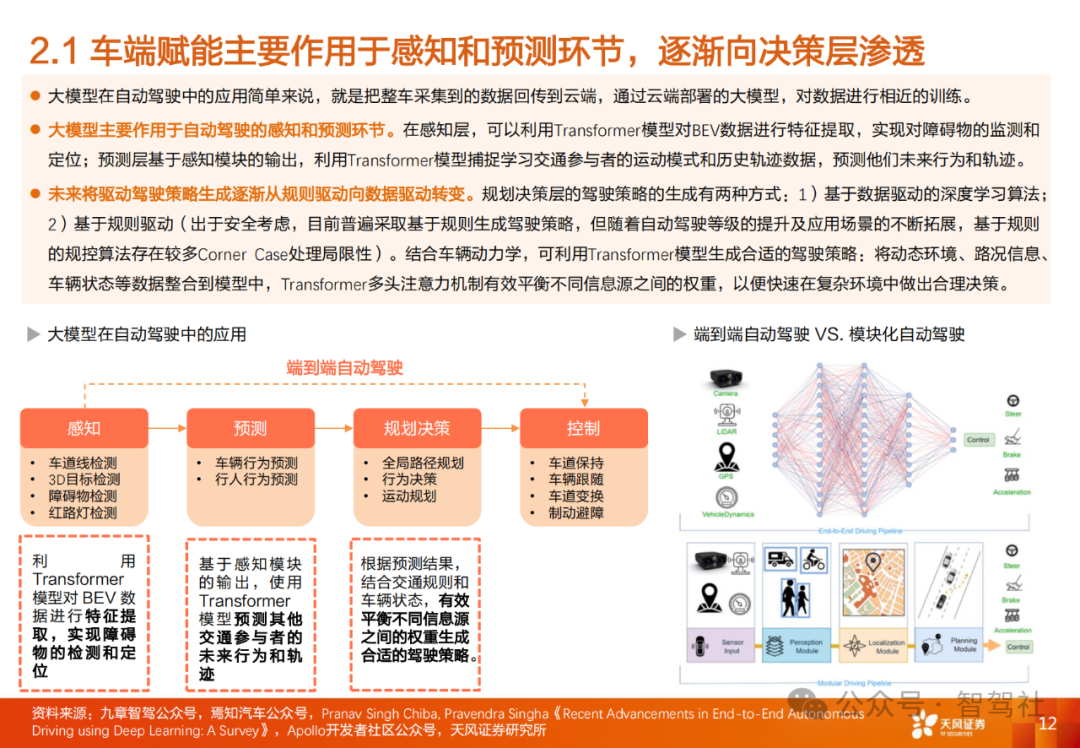
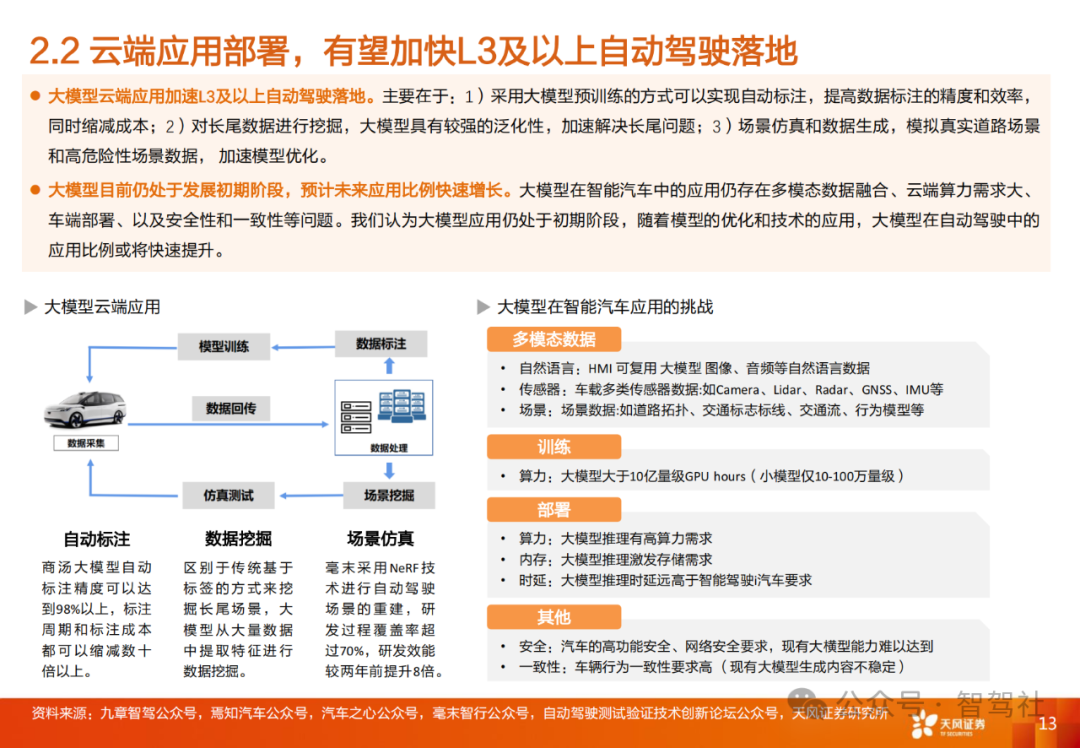
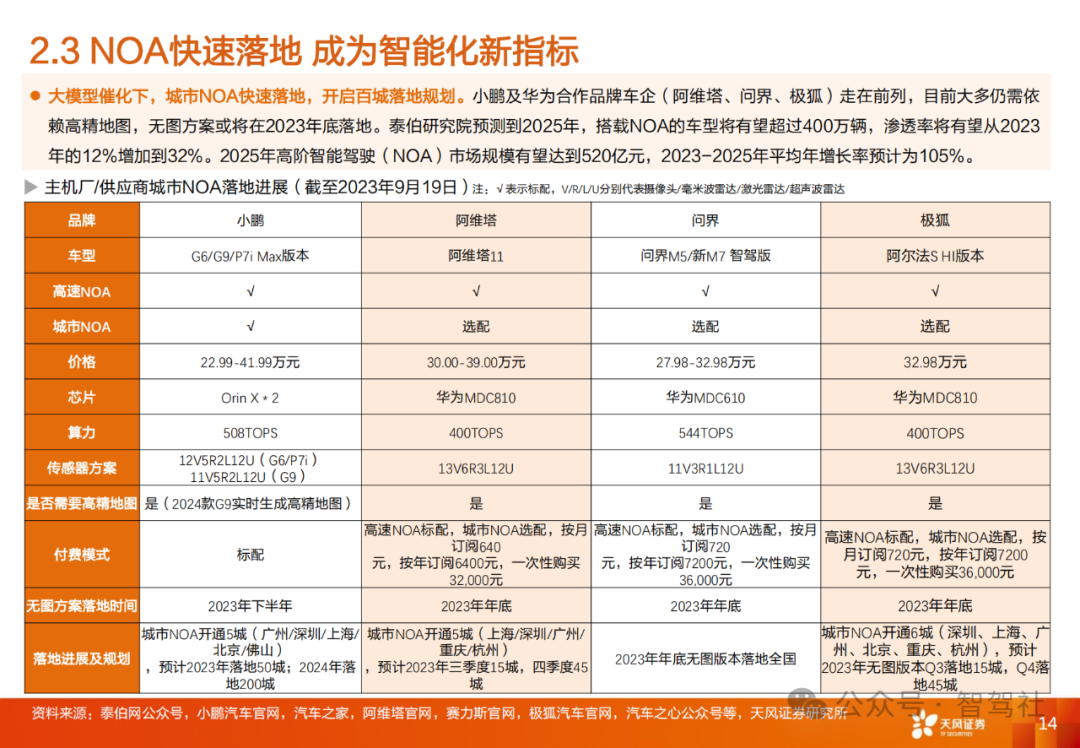
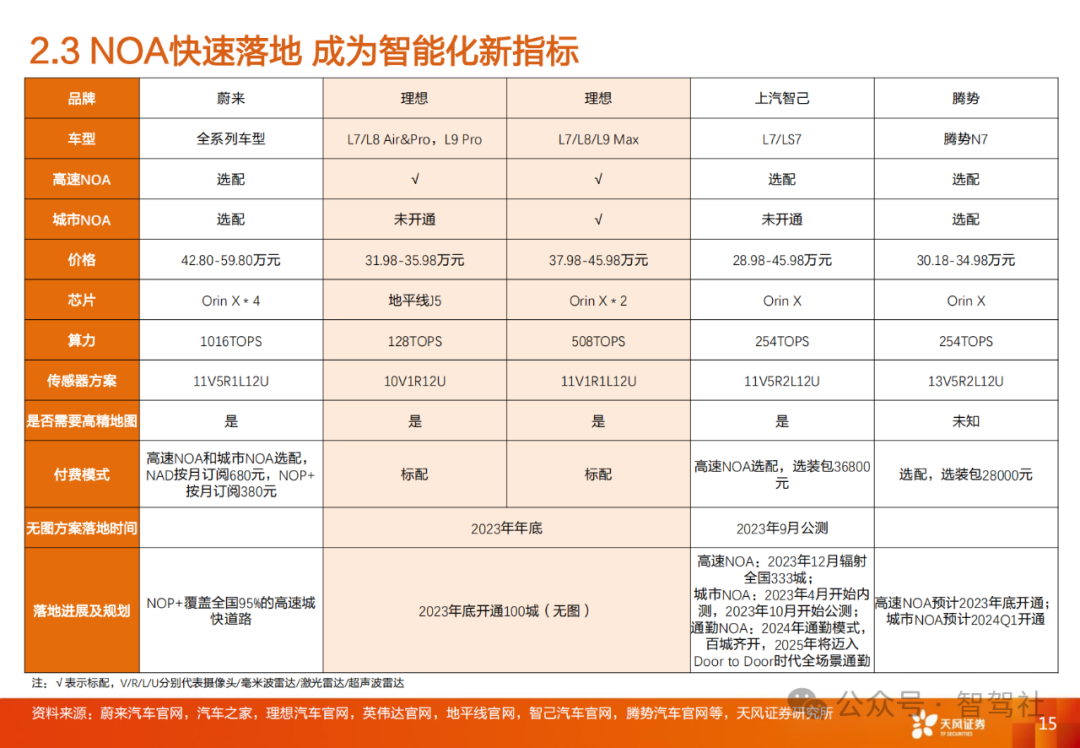
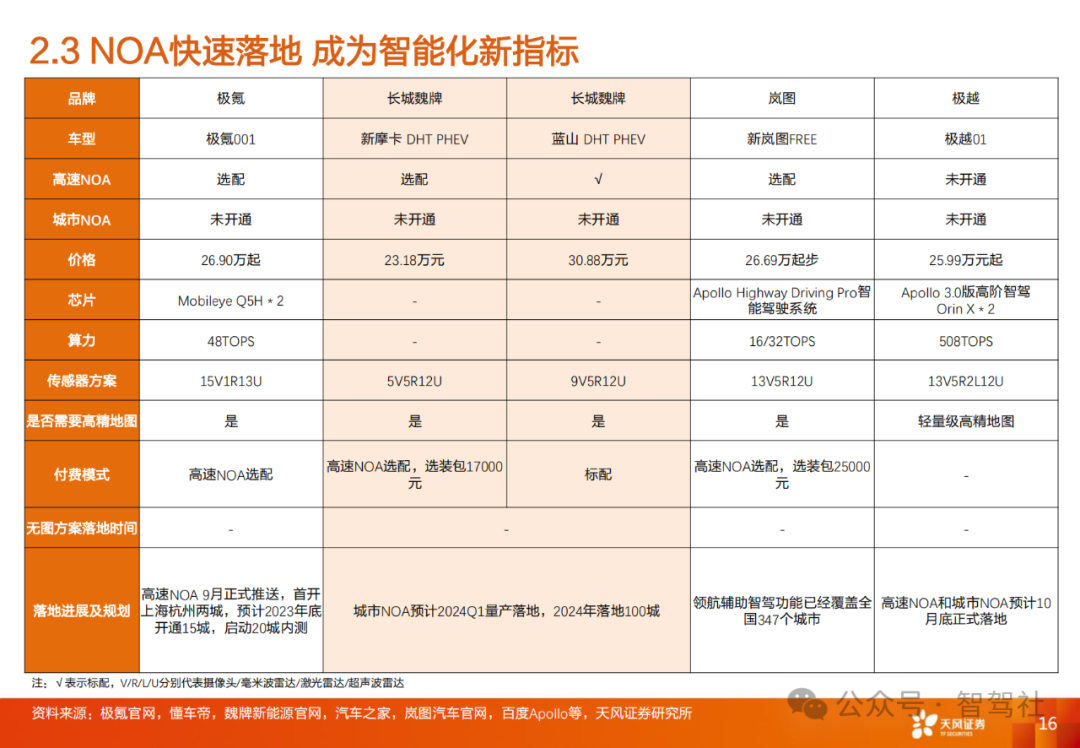
在车端大模型可赋能自动驾驶的感知和预测环节,并逐渐向决策层渗透,驾驶策略或将从规则驱动向数据驱动转变。在云端大模型通过实现自动标、数据挖掘、仿真场景生成,提高自动驾驶迭代效率和速度。大模型催化下,高速NOA、通勤NOA、城市NOA等功能快速上车,同时有望加快L3及以上自动驾驶落地进程。
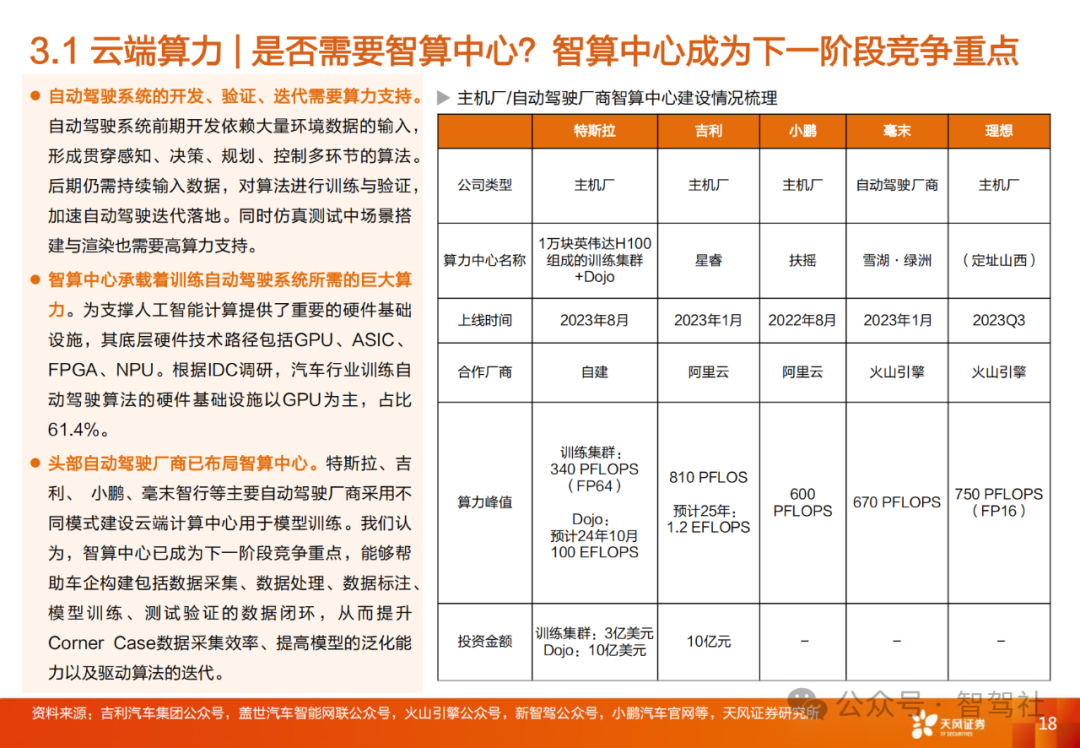
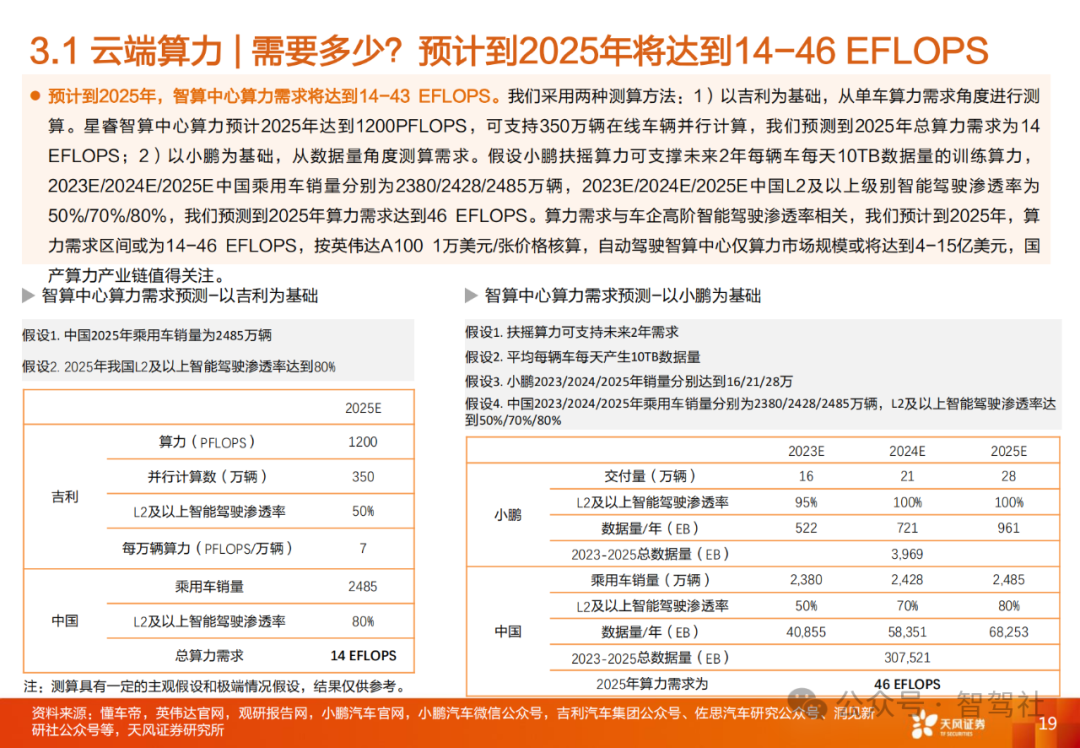
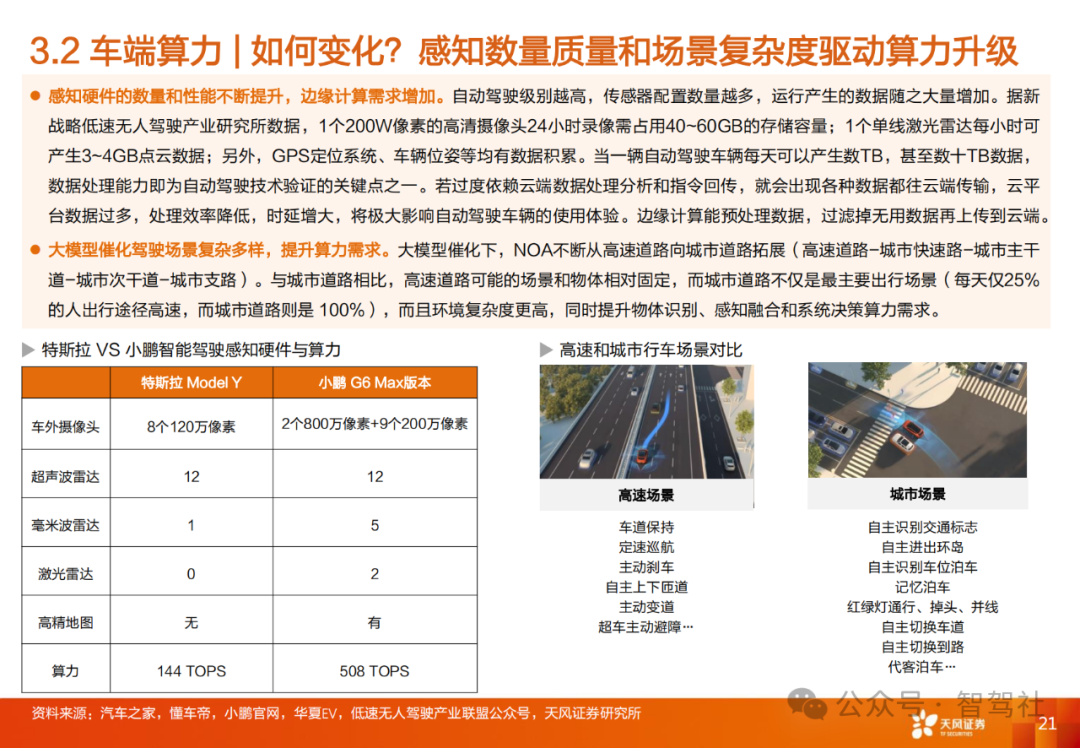
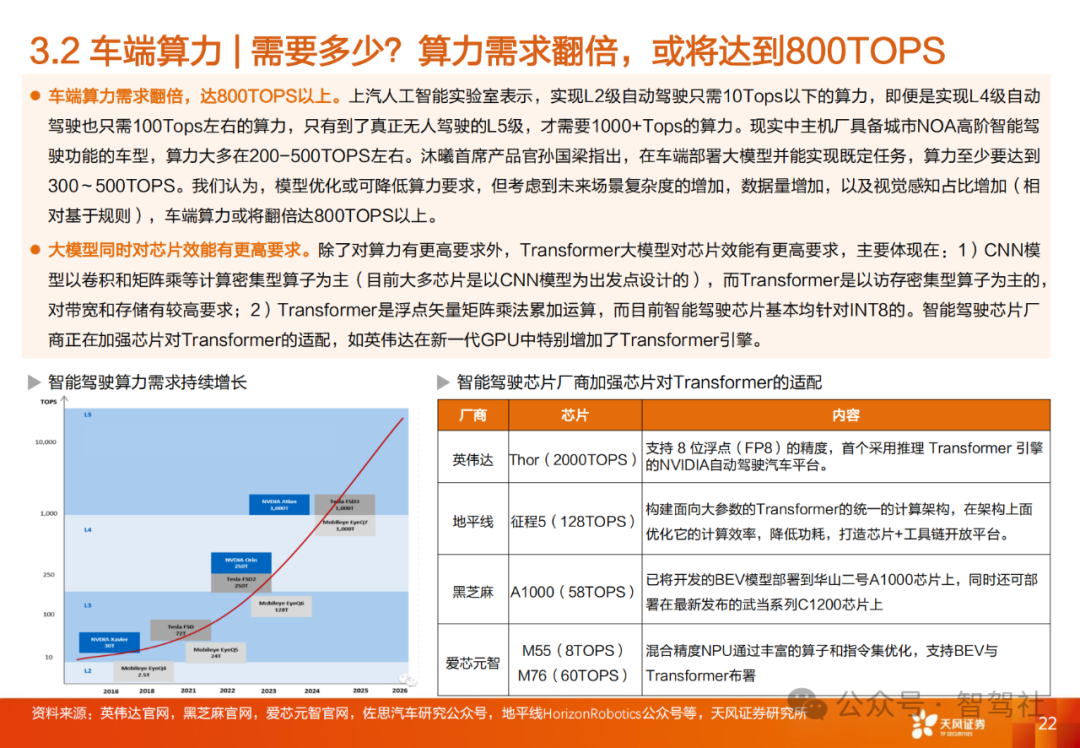
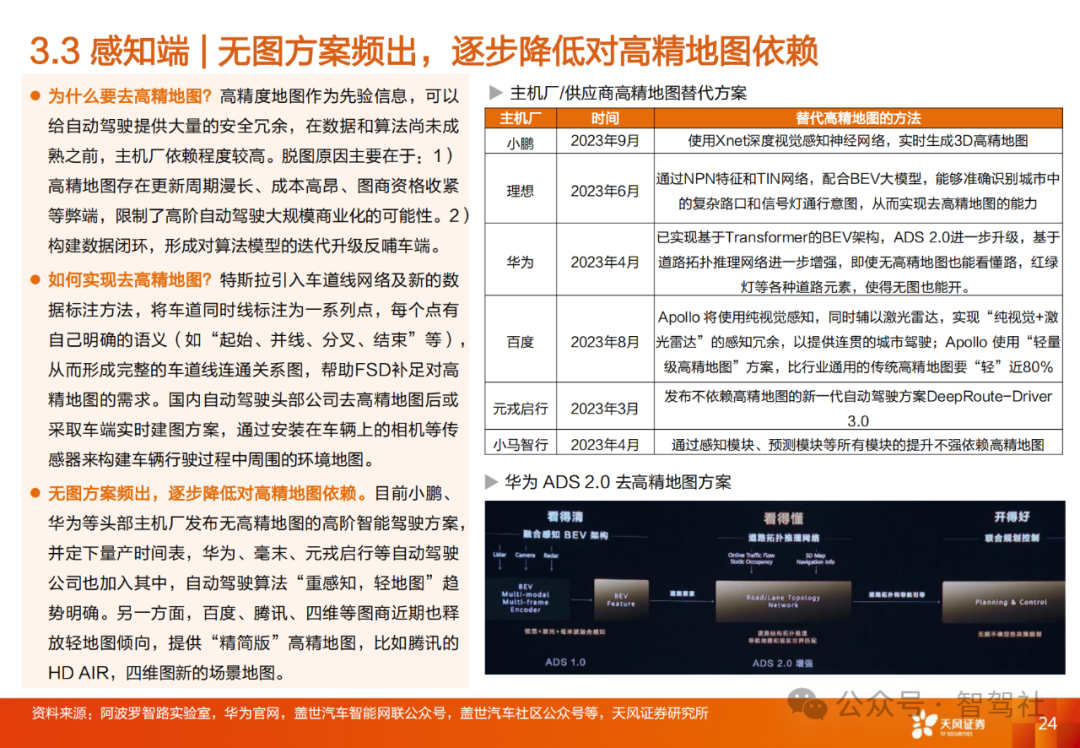
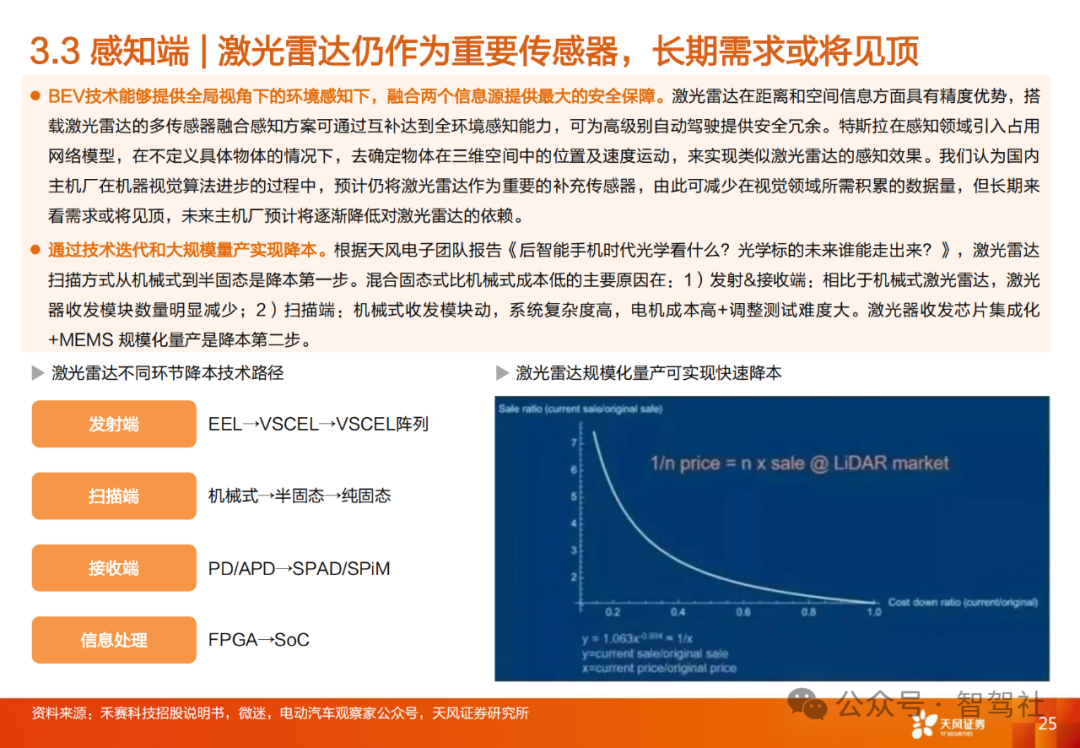
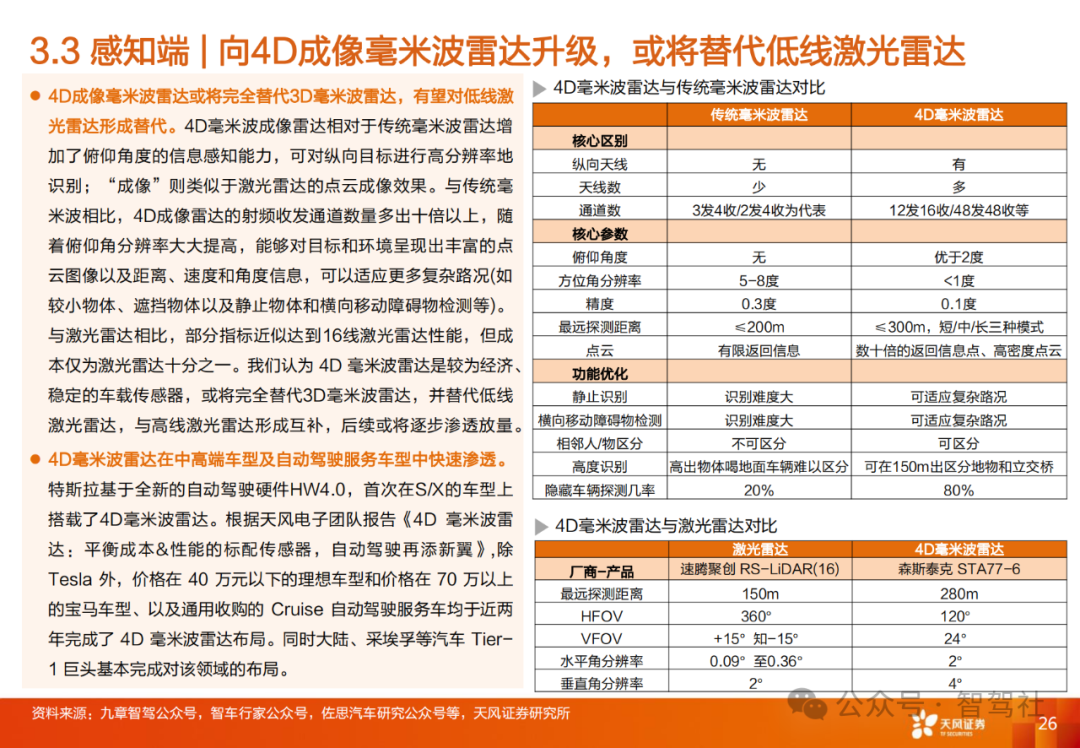
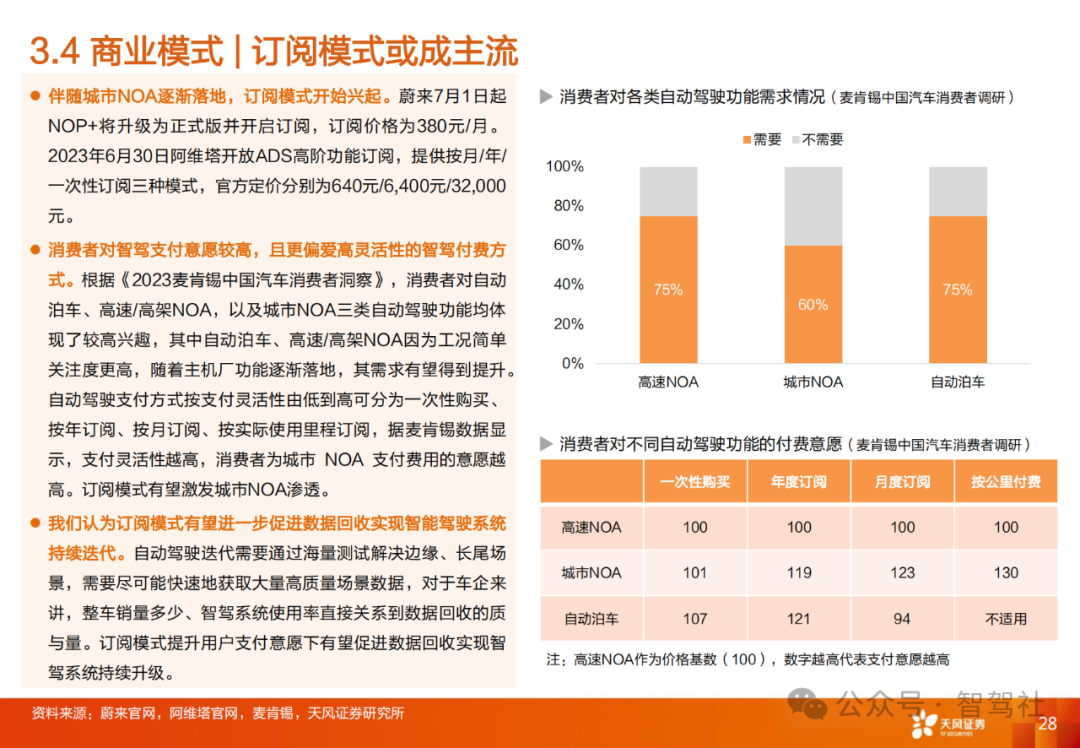
大模型的发展对云端和车端算力、感知端、执行端以及商业模式都产生了深远影响。预计到2025年,智算中心的算力需求将大幅增长,市场规模可能达到数亿美元。车端算力需求也将翻倍,对芯片的效率和能耗提出了更高要求。感知端的技术进步,如摄像头像素的提升和对高精地图依赖的减少,以及激光雷达和4D成像毫米波雷达的应用,都将推动自动驾驶技术的发展。执行端的线控底盘技术也将成为实现智能驾驶的关键。此外,随着城市NOA功能的落地,订阅模式的兴起为消费者提供了更灵活的付费选择,有助于NOA功能的普及和智能驾驶系统的持续迭代。
























 2487
2487











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











