







Apollo自动驾驶开放平台是一个开放的、完整的、安全的自动驾驶开源平台。代码已经跑通了园区物流、自动泊车、园区接驳、智慧农业、高速物流、健康养老等场景,并稳步面向量产和运营。Apollo推出面向量产的人工智能车联网系统解决方案小度车载OS,具备开放语音、语义、多模交互、车载信息安全、驾驶员检测五大核心能力,可根据需求定制化,实现“千人千面”。
Autoware是世界上第一款用于自动驾驶骑车的“一体化”开源软件。Autoware的功能主要适用于城市,但高速公路和非市政道路同样可以使用。同时在依赖ROS建⽴的Autoware自动驾驶开源软件上可以提供丰富的开发和使用资源。
Ⅱ 硬件区别
以NXP的二代蓝盒子为硬件基础,这两个自动驾驶软件开源平台最大的区别在于底层,最上层的应用模块差别不大。硬件系统方面,Apollo推荐64位x86指令集的CPU加英伟达GPU架构。Autoware主要使用英伟达的AGX Xavier或PX2,也就是推荐ARM的V8指令集架构CPU。当然,也支持64位x86指令集的CPU加英伟达GPU架构。

Ⅲ 框架区别
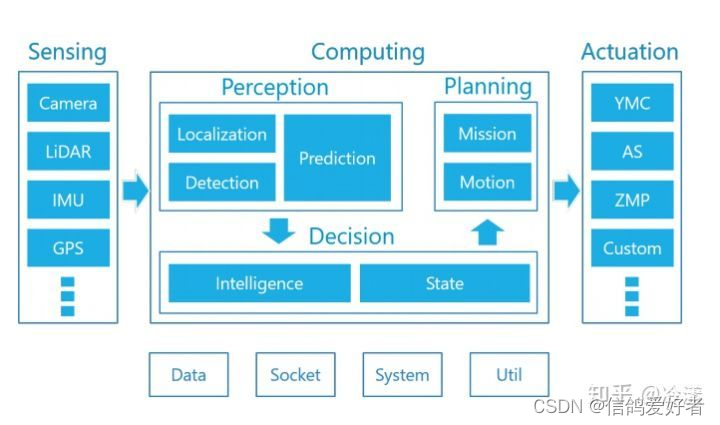
Autoware的框架主要包含感知(Perception)、决策(Planning)两个部分,感知部分包含定位(Localization)、检测(Detection)、预测(Prediction)三个模块,决策包含全局运动规划(Mission)、局部运动规划(Motion)两个模块。
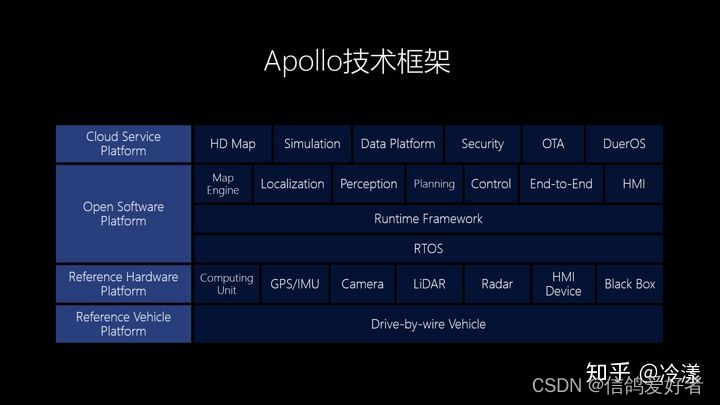
相比Autoware,Apollo的框架更加丰富和复杂,整个框架包括云服务平台、开源软件平台、参考硬件平台和参考软件平台四部分。
云服务平台包括:
高精地图服务:高精度地图是实现无人驾驶汽车高精度定位、路径导航、路径规划的基础;
仿真引擎:通过海量实际路况及自动驾驶场景数据,促进自动驾驶系统的开发快速迭代进行;
数据平台:包括传感器数据、车辆行驶数据等;安全:数据安全、通信安全、服务安全;
OTA:空中下载技术(Over-the-Air Technology)是远程升级系统的必备技能;
DuerOS:百度的语音交互平台,未来可通过语音与车实现交互。
开源软件平台是Apollo自动驾驶系统的核心部分,包括功能模块、运行框架和实时操作系统三部分。功能模块可细分为:
地图引擎:运行高精度地图;
定位模块:通过GPS、V-SLAM、L-SLAM、里程计等多种定位源融合,结合高精度地图,实现精准定位;
感知:通过激光雷达、毫米波雷达、摄像头,精确感知车辆周围的环境路况,包括车辆、行人、交通标志等等;
规划:主要包括路径规划、运动障碍物的预测等;
控制:实现控制车辆的转向、油门、刹车等操作;End-to-End:基于深度学习的横向和纵向驾驶模型;
HMI:人机交互模块。
硬件平台主要是无人驾驶系统的计算硬件和各种传感器硬件,包括GPS/IMU、摄像头、激光雷达、毫米波雷达、HMI设备、黑盒子等。
车辆平台,可实现线控转向、线控油门和线控制动等线控功能。
原文链接:https://zhuanlan.zhihu.com/p/142775802
Universe 还是Apollo | 关于自动驾驶公司选择Apollo还是Autoware的一些思考:1) 对比autoware. Universe,百度所谓的开源,其实有商业目的,他们开源的代码和自己使用的代码不是同一套代码,想商用的公司要注意了。apollo自动驾驶都是基于高精地图的,比如他们提供了一个虚拟车道线的云端地图制作工具,对record文件大小做了限制,只能做一段很短的地图(不到100米),这种限制即使封闭园区也不满足需求,需要自己解决。对比autoware的社区环境,apollo比较差。再比如标定工具,居然搞了个云标定。算法类的更需要云端支持。比如倒车入库,车辆进去了,就无法再开出来,帅不?DKIT各种小问题很多,硬件发货过来一些就是坏的。2)cyber rt , bazel 这些对于非百度的开发者属于画蛇添足,既然最多算个学习的项目,还不如ros2 ,cmake来得实在,增加学习成本,与autoware 也不兼容。3)cpu gpu的开销都比较大。这个对算力要求很高,一般的机器安装虚拟机是无法开发调试的。Auoware.Unverse提供了Docker和源码两种编译方式,Apollo只能Docker编译,因为他有一些函数没有开源。4)Apollo文档有,也比较集中,都在里面的doc中的markdown文件有说明,缺点是6.0里包括2.0文档,非常混乱。另外代码中基本没有注释,要命的是.proto协议中也没什么注释。5)客服,也许我们是企业用户,apollo studio几乎没什么技术支持,回答问题比较一般和初级,对提出问题他们可以选择根据喜好选择回复或者不回复。如果你用了Apollo的这套代码,有点技术水平,那么你前期做个封闭园区50米的自动驾驶是比较舒服的,同时也确实能学到一些基础知识。中期如果想增加一些功能,在这个项目里就找不到了,比如slam ,室内自动驾驶,点云底图制作,地图标注,传感器自动标定,各种规划算法等等吧,还是autoware靠谱。总体看,百度的模型在环,各种在环等等的说法都是对他们自己而言的,三方的应用这些功能都是没有的,反而会被云端限制,想离线要自研绕开,非常的麻烦。发布于
作者:Martin Zhu
链接:https://www.zhihu.com/pin/1630846986193412097
来源:知乎

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









