







 本文详细介绍了机器人控制的几种方法,包括关节空间和笛卡尔空间的控制,如位置、速度、加速度、力/力矩控制以及力位混合控制。同时,讨论了控制问题、扰动因素以及运动学和动力学在机器人控制中的应用。通过实例展示了速度前馈如何改善位置控制的动态偏差。
本文详细介绍了机器人控制的几种方法,包括关节空间和笛卡尔空间的控制,如位置、速度、加速度、力/力矩控制以及力位混合控制。同时,讨论了控制问题、扰动因素以及运动学和动力学在机器人控制中的应用。通过实例展示了速度前馈如何改善位置控制的动态偏差。
机器人的控制方法根据控制量分类
按照控制量所处空间的不同,机器人控制可以分为关节空间的控制和笛卡尔空间的控制。对于串联式多关节机器人,关节空间的控制是针对机器人各个关节的变量进行的控制,笛卡尔空间控制是针对机器人末端的变量进行的控制。按照控制量的不同,机器人控制可以分为:位置控制、速度控制、加速度控制、力控制、力位混合控制和振动控制等。这些控制可以是关节空间的控制,也可以是末端笛卡尔空间的控制
位置控制
目标是使被控机器人的关节或末端达到期望的位置。下面以关节空间位置控制为例,说明机器人的位置控制。如图1-1所示,关节位置给定值与当前值比较得到的误差作为位置控制器的输入量,经过位置控制器的运算后,其输出作为关节速度控制的给定值。关节位置控制器常采用PID算法,也可以采用模糊控制算法。

速度控制
在图1-1中,去掉位置外环,即为机器人的关节速度控制框图。通常,在目标跟踪任务中,采用机器人的速度控制。此外,对于机器人末端笛卡尔空间的位置、速度控制,其基本原理与关节空间的位置和速度控制类似
加速度控制
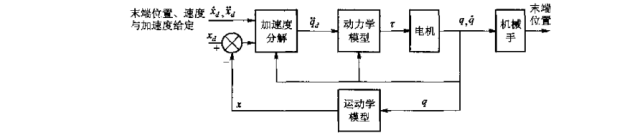
图1-2所示为分解加速度运动控制示意图。首先,计算出末
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2982
2982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









