






如果说计算机视觉离不开图像,那么自动驾驶就离不开多传感器!无论是工业视觉、三维重建还是自动驾驶感知都涉及到各种各样的传感器,其中最最基础的就是相机、激光雷达和毫米波雷达,归根结底它们都离不开相机成像的精确几何模型和传感器之间的精确标定,可以说没有准确的标定,就不会有下游任务的正确结果~
而在实际应用中,传感器的内外参数往往需通过精密的实验和复杂的计算来确定。无论是在自动驾驶领域还是图像测量和机器视觉,传感器的准确标定都至关重要,其标定的准确性和算法的稳定性直接决定了传感器性能的优劣及应用结果的可靠性。因此,精确的传感器标定是成功进行后续处理工作的基础,其标定结果的精度及算法的稳定性直接影响结果的准确性。特别是自动驾驶领域,单目测距测速、多传感器融合、毫米波雷达视觉融合、激光雷达视觉融合特别依赖相机/激光雷达标定的精度。

传感器标定方向待遇如何?
下面是一张从某招聘网站获得的最新岗位信息(传感器标定算法开发)截图,可以很清楚的看到企业对标定这个岗位的要求。多条要求中都涉及到了相机/激光雷达标定,因为这些传感器作为智能驾驶或机器人领域中不可或缺的传感器,是几乎所有智驾方案及机器人视觉方案都会使用的,所以熟练掌握传感器标定的原理和开发优化策略是任职的关键。

传感器标定的难点在哪里?
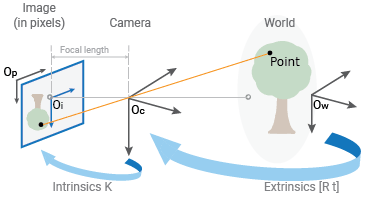
先说最基础的相机标定,每一台相机都有其独特的内参,它们是由相机的设计和制造决定的固有属性。因此,在使用相机进行高精度的测量、摄影或者机器视觉应用之前,需要通过标定过程来确定这些内参,以便能够正确地将三维世界中的点投影到二维图像平面上,或者从二维图像中恢复出三维信息。
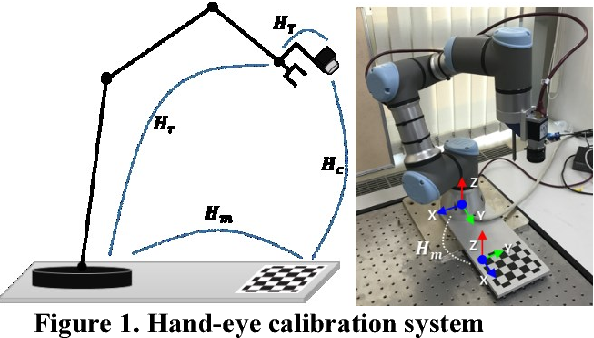
而传感器之间的外参标定精度也尤为重要,自动驾驶车辆的安全运行密切依赖于感知系统提供准确信息的能力。传感器外参标定是实现传感器数据在统一的时空坐标系中融合的基础步骤,以最常见的激光雷达为例,如果外参标定不准,多传感器融合就无法有效感知!!!

量产级的项目丰富简历,解决工程问题
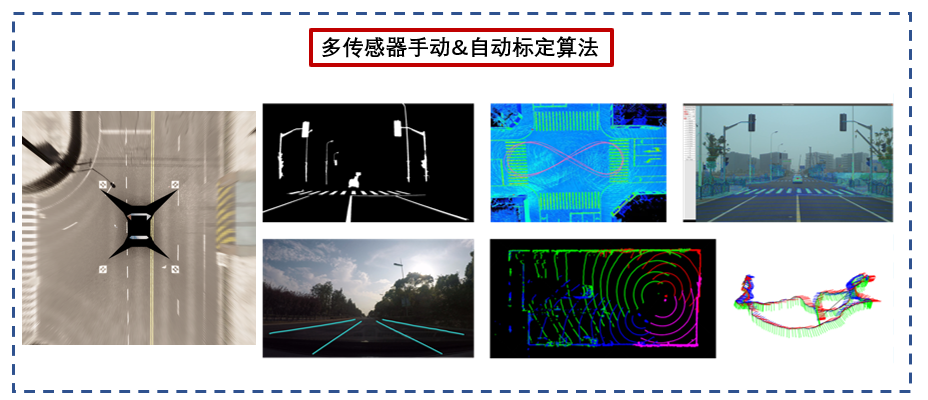
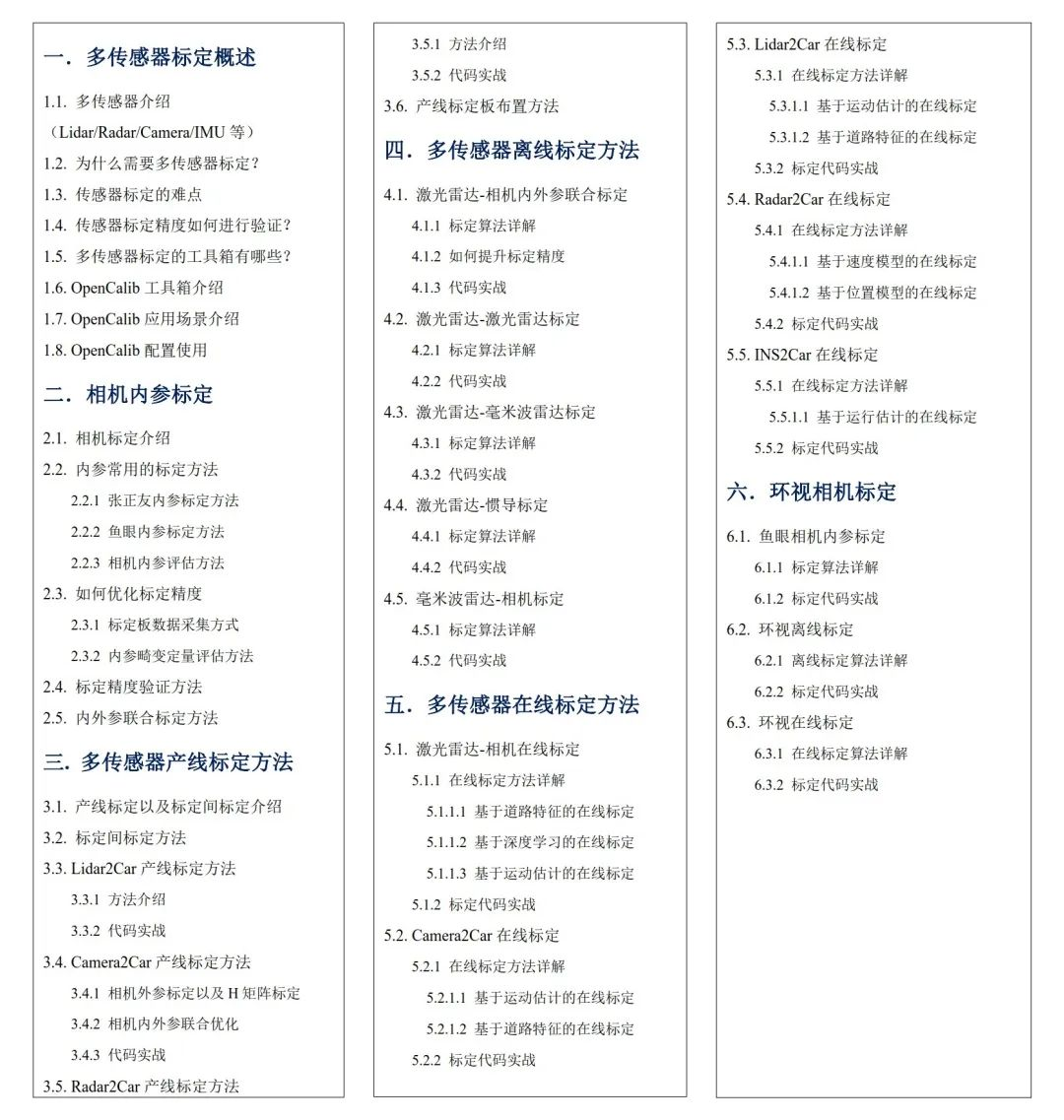
自动驾驶之心在深入调研相机标定相关内容后,针对常见的工程和量产问题,开发了一套详细的课程,对于标定用到的各种标定板的识别技术进行详细的讲解。课程以自动驾驶场景为例来讲解相机内参和相机到车体外参的标定,包括在线标定与产线标定。经过我们的项目实训后,是可以实实在在写入简历中的项目,对于自动驾驶实车量产中遇到的问题都有涉及,精选大纲如下:

而针对工业界和学术界对多传感器标定所需的技能和实战要求,我们制定了深入浅出的理论+非常丰富的实战类课程大纲,针对相机内参标定、标定精度优化、传感器到车体标定、多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定方案展开了算法讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习,让大家循序渐进,学完课程后能够掌握不同传感器的标定方法及优化策略。
主讲老师
路飞,自动驾驶之心前沿技术研究团队成员,国内首个面向自动驾驶多传感器标定课程讲师。曾在头部自动驾驶公司工作多年,有多年的自动驾驶算法研发和项目交付经验。在IROS,ICRA,RA-L,SIGGRAPH,TVCG等机器人、计算机图形学领域发表多篇论文,在自动驾驶传感器标定、SLAM、模型优化方面有着丰富的研究和项目交付经验。
适合人群
自动驾驶、计算机视觉、机器人、AR/VR相关研究方向的本科/硕士/博士;
自动驾驶、计算机视觉、机器人、AR/VR相关方向算法工程人员;
想要转入自动驾驶、计算机视觉、机器人、AR/VR方向,并希望能够深入相机标定算法的小伙伴;
本课程需要具备的基础
具有一定的C++或python基础,熟悉深度学习常用的一些基础算法;
对自动驾驶中的相机传感器的应用有一定了解;
一定的高等数学、线性代数、矩阵理论基础;
学后收获
对相机/多传感器标定所有主流方案的原理有着深入理解,在产线、离线、在线标定中精度能达到量产级别;
学习到自动驾驶相机/多传感器标定的算法,从根本上学会如何进行手动和自动标定;
能够精通常用相机/多传感器标定算法,理论实践并重,无论是学术界抑或工业界都能直接复用;
学完本课程能够达到2年左右的相机标定工程师水平;
能够结识许多行业从业人员与学习合作伙伴;
拥有实战项目和解决实际问题的能力,可直接写入简历,且含金量高。
课程咨询

版权声明
自动驾驶之心所有课程最终版权均归自动驾驶之心团队及旗下公司所属,我们强烈谴责非法盗录行为,对违法行为将第一时间寄出律师函。也欢迎同学们监督举报,对热心监督举报的同学,我们将予以重报!
投诉微信:AIDriver004(备注:盗版举报)

















 148
148

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









