







 文章介绍了多种类型的机器人底盘,包括两电机差速底盘常用于巡线比赛,驱动轮居中的设计适合服务机器人,四驱底盘在VEX比赛中常见,三电机全向轮底盘适用于足球机器人,而履带底盘则应用于排爆和爬楼机器人。每种底盘的设计考虑了运动灵活性、稳定性及负载能力。
文章介绍了多种类型的机器人底盘,包括两电机差速底盘常用于巡线比赛,驱动轮居中的设计适合服务机器人,四驱底盘在VEX比赛中常见,三电机全向轮底盘适用于足球机器人,而履带底盘则应用于排爆和爬楼机器人。每种底盘的设计考虑了运动灵活性、稳定性及负载能力。
两电机差速底盘
方式1:驱动轮在后,万向轮在前(支撑轮也可以换成全向轮,目的只是撑地),在一般的巡线比赛中较常用。
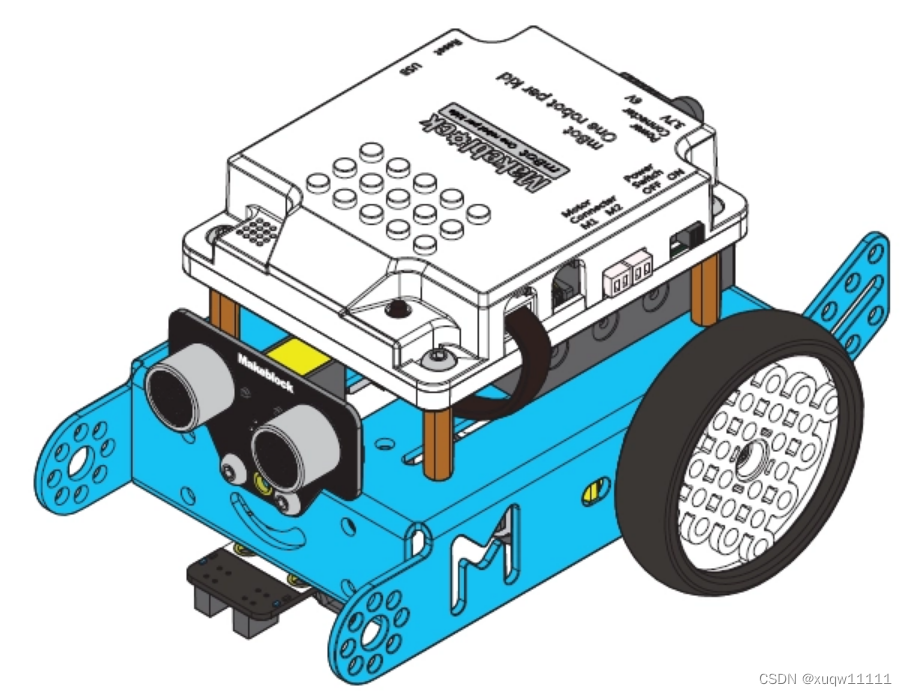

该底盘的优点:运动灵活,组装简单
该底盘的缺点:车体上负载不宜太大,重心不宜过高,否则容易前倒或者后倒,车子的重心最好落在后轮偏前一点,启动速度不要过快。
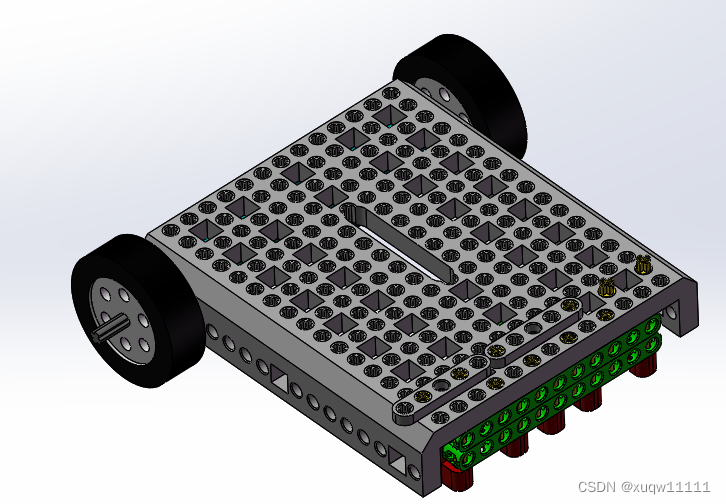
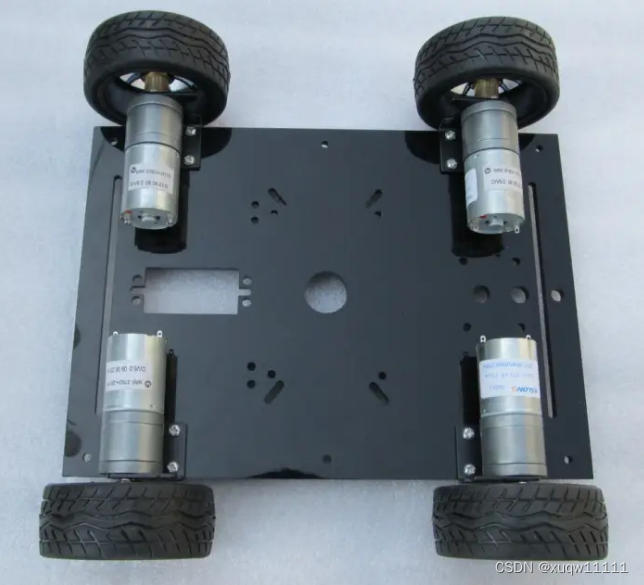
方式2:驱动轮居中,万向轮在前后各一套(结构稳定些,也不宜负载重量较大)在服务机器人领域较常用。

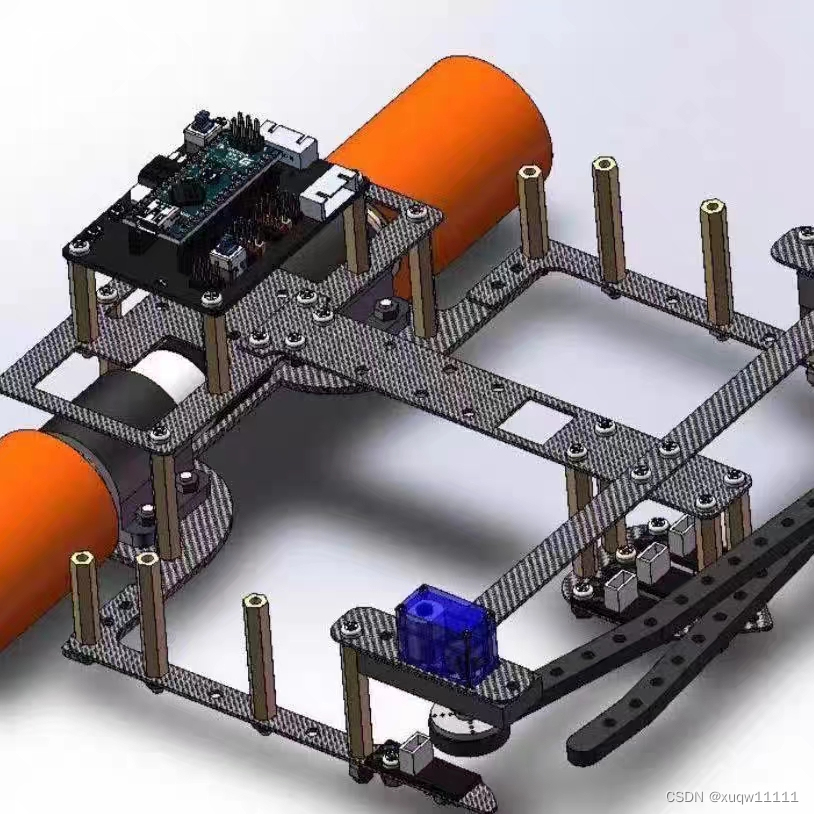
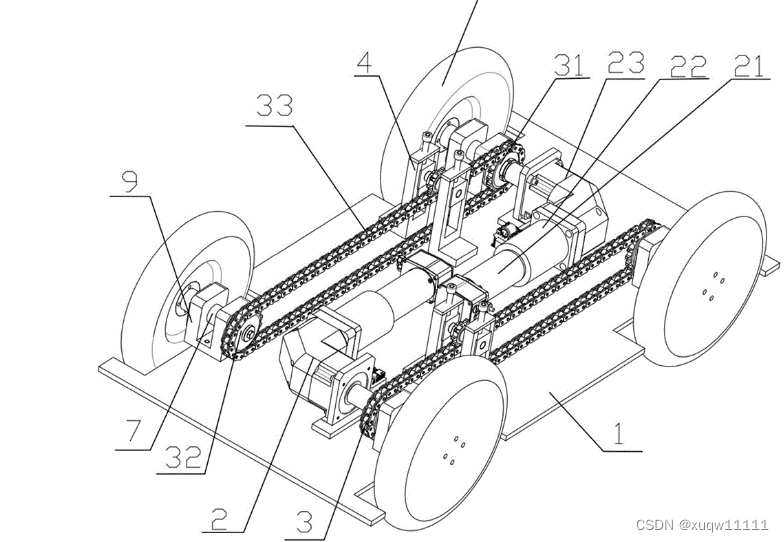
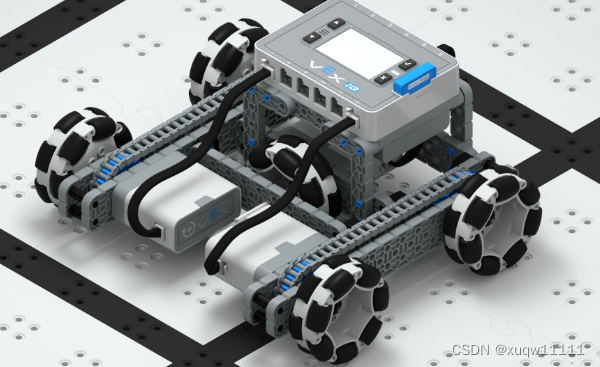
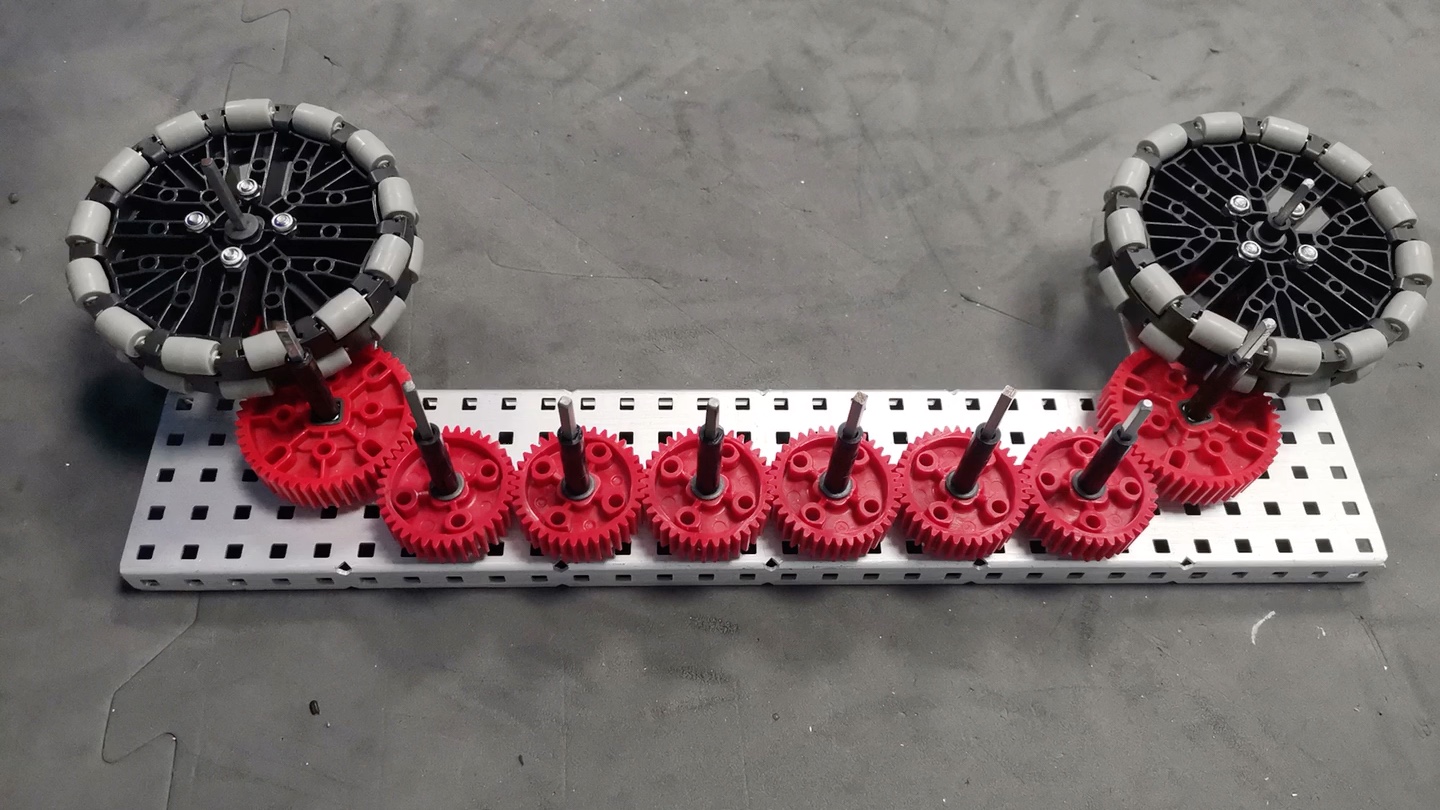
方式3:两电机 前后同步的四驱(可以使用链条同步或者齿轮同步,安装较麻烦,但运动一致性较好,阻力调节很关键) 在vex机器人的比赛中较常用。
三电机全向底盘
三电机全向轮底盘,根据速度的分解与合成,可以较灵活的运动。在足球机器人比赛中该形式的底盘较常用。


具体运动控制参考视频
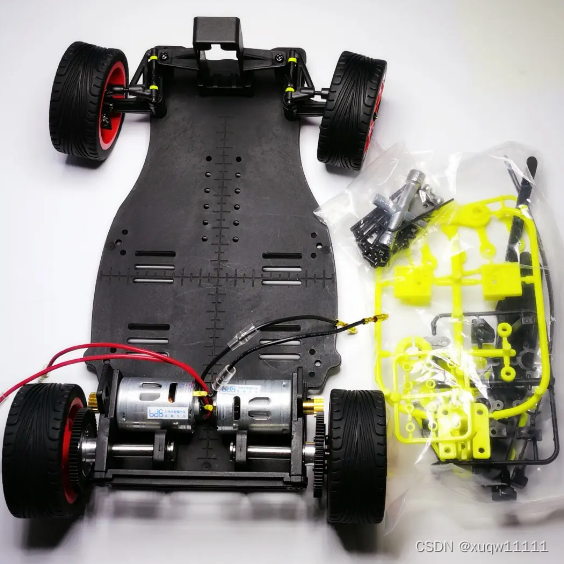
汽车原理的底盘(车模与智能车竞赛,转弯角度小,无法实现原地转弯)
四电机全向底盘(足球机器人比较常用)
普通轮底盘,前进后退一致性好,但是转弯的摩擦力较大,不宜精确控制,适合较重物品的搬运和较小角度的调整,全向轮四电机底盘前后一致性还可以,转向摩擦力小,但是在左右倾斜的路面上容易产生侧滑。右边的图片在makex比赛中较常用。

四电机全向轮底盘,根据速度分解和合成可实现全向移动(在小型足球比赛中常用)


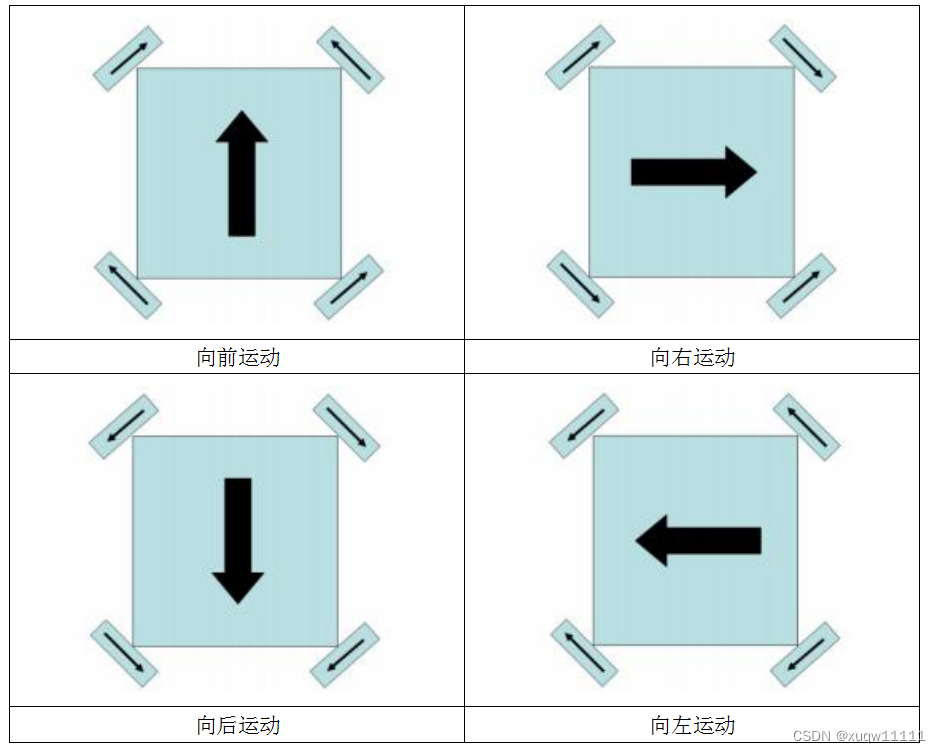
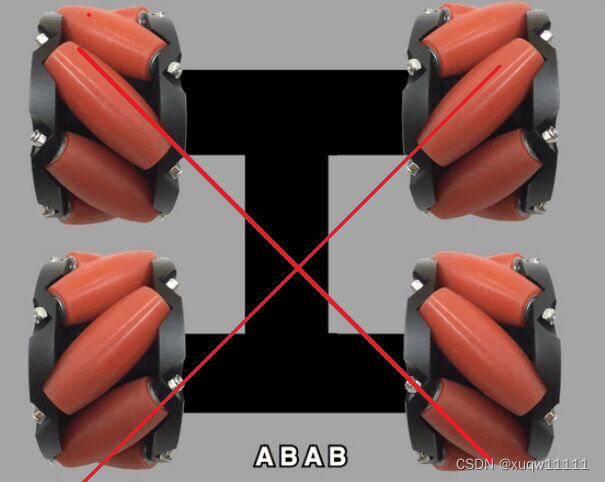
四电机麦克纳姆轮底盘(侧向运动有偏差,前后精确)


底盘的安装成X字型
具体运动的实现方式参考视频
「021」经典机械原理3D动画,重载麦克纳姆轮工作原理讲解!,科技,机械,好看视频
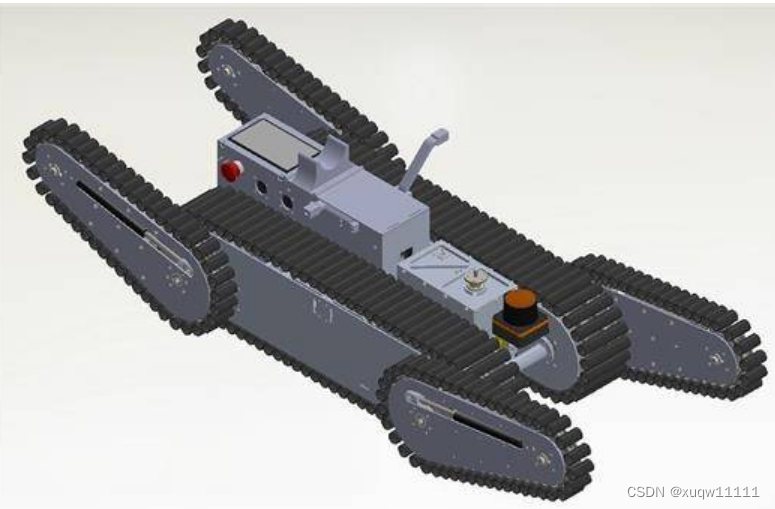
履带底盘(经常应用排爆机器人、爬楼梯机器人)

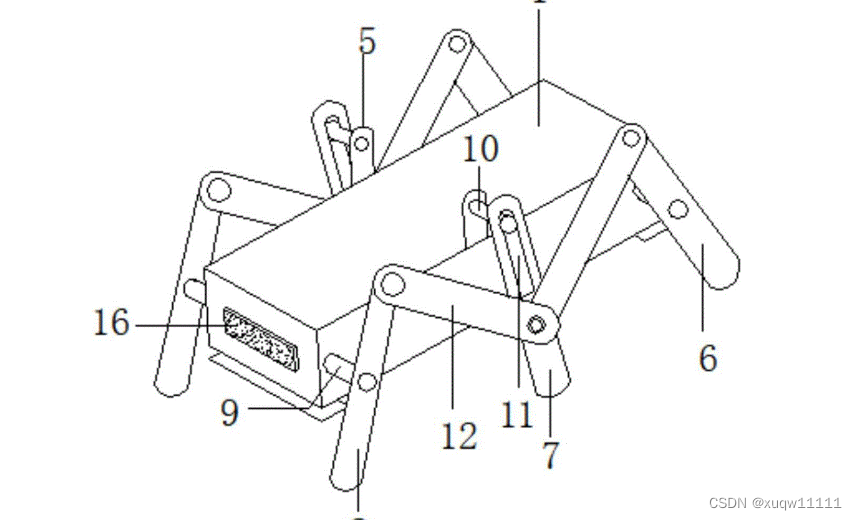
腿式仿生机器人




















 2408
2408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









