







1.背景
不知道大家有没有这样的经历,自己的catkin_ws/src下的package越来越多了,每次运行的时候,都得先去确认一下package的名字。有没有像ROS by example的代码rbx1那样,将这本书的所有package全部集中到一个metapackage下。比如我们实验室用的机器人是youbot,那么我可以把自己写的代码全部放在一个地方,比如叫youbot_yw,创建的package都放在它里面,比如vision, navigation等等。而另外一个同学他写的代码也可以放在一个属于他的metapackage里面,这样就知道代码到底是谁的了,也便于编译。但是我查了一下,ROS官网也没有关于这个的tutorial,因此我把rbx1的写法仔细看了一下,就形成了这篇文章,希望大家都能拥有自己的metapackage。
2.预备知识
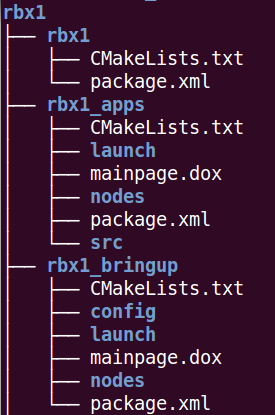
关于metapackage,观察rbx1的结构,要成为metapackage,它子目录下得有一个和它同名的文件夹。然后才是一些正常的package,比如这里的rbx1_bringup等。
2.1建立自己的metapackage
cd catkin_ws/src/
mkdir -p yw_youbot/yw_youbotcd yw_youbot/yw_youbotcmake_minimum_required(VERSION 2.8.3)
project(yw_youbot)
find_package(catkin REQUIRED)
catkin_metapackage()<package>
<name>yw_youbot</name>
<version>0.4.0</version>
<description>ROS By Example Volume 1</description>
<maintainer email="patrick@pirobot.org">Patrick Goebel</maintainer>
<license>BSD</license>
<url type="website">http://ros.org/wiki/rbx_vol_1</url>
<url type="bugtracker">https://github.com/pirobot/rbx1/issues</url>
<author email="patrick@pirobot.org">Maintained by Patrick Goebel</author>
<buildtool_depend>catkin</buildtool_depend>
<export>
<metapackage/>
</export>
</package>cd ~/catkin_ws
catkin_make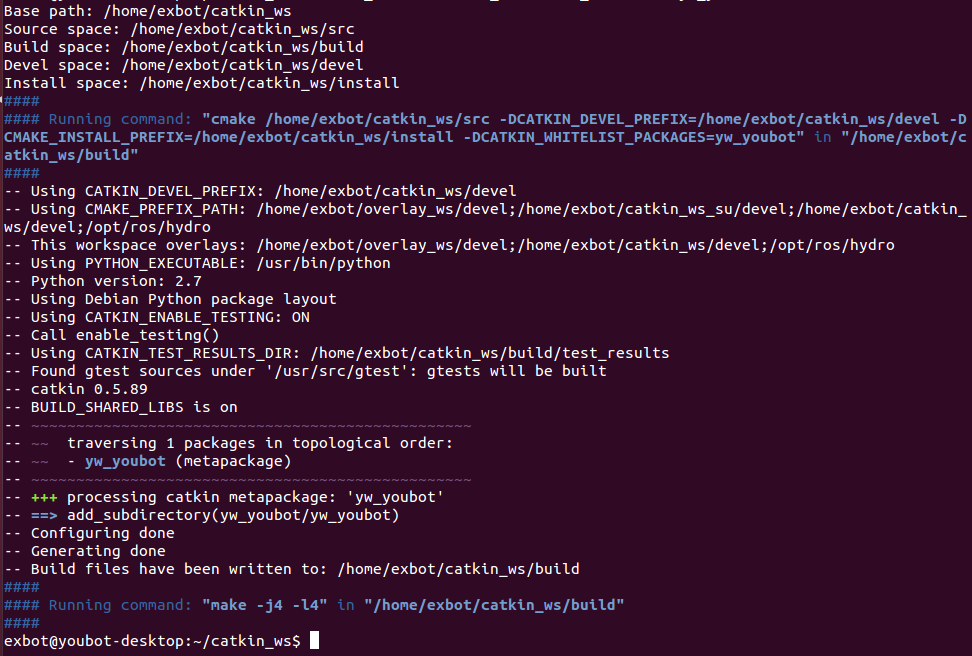
2.2 创建一个hello_world来测试
接下来就和我们平时正常的一样的,我们以前是在catkin_ws/src下创建package,现在我们在metapackage yw_youbot下创建一个package,这里的package名字为hello_world,依赖于系统的roscpp
cd ~/catkin_ws/src/yw_youbot
catkin_create_pkg hello_world roscpp
cd hello_world/src
gedit hello_world_node.cpp#include <ros/ros.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "hello_meta_package_node");
ros::NodeHandle nh;
ROS_INFO("Hello ROS!");
ros::spin();
}cmake_minimum_required(VERSION 2.8.3)
project(hello_world)
find_package(catkin REQUIRED COMPONENTS
roscpp
)
catkin_package()
include_directories( ${catkin_INCLUDE_DIRS})
add_executable(hello_world_node src/hello_world_node.cpp)
target_link_libraries(hello_world_node ${catkin_LIBRARIES})
最后命令行编译
cd ~/catkin_ws
catkin_make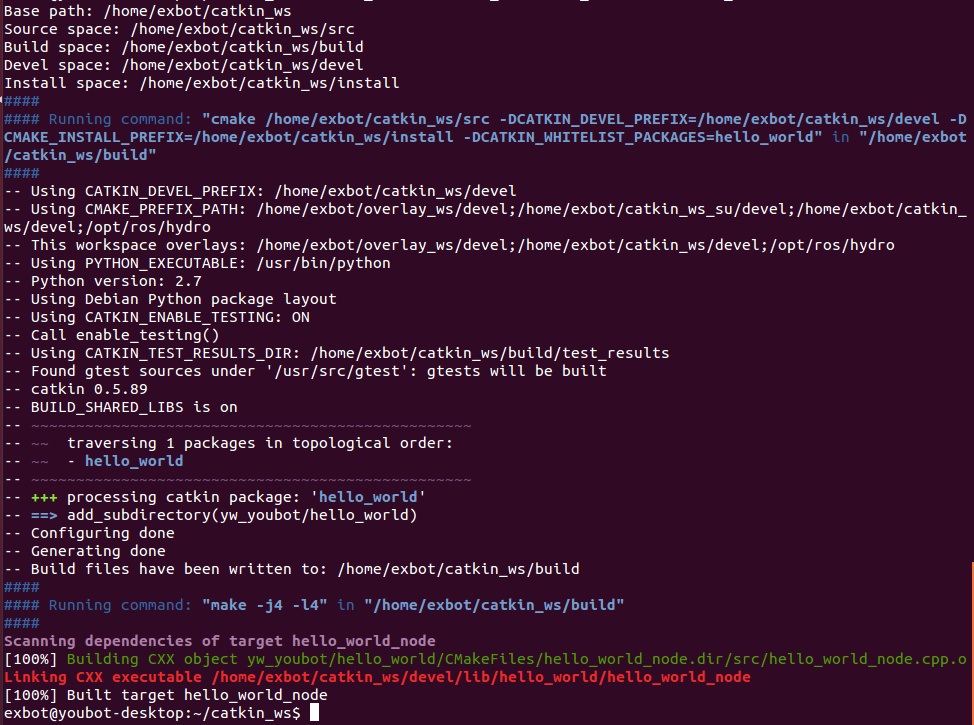
启动roscore检查刚刚编译的程序
roscorerosrun hello_world hello_world_node 至此,可以看见我们在metapackage下建立的hello_world 的package完全是可以运行的,其实,创建的过程完全是在第一部分,后面这个只是为了检验而已。
3. 写在最后
这里注意一个问题,rbx1的子目录rbx1中package.xml中是如下写的
<package>
<name>rbx1</name>
<version>0.4.0</version>
<description>ROS By Example Volume 1</description>
<maintainer email="patrick@pirobot.org">Patrick Goebel</maintainer>
<license>BSD</license>
<url type="website">http://ros.org/wiki/rbx_vol_1</url>
<url type="bugtracker">https://github.com/pirobot/rbx1/issues</url>
<author email="patrick@pirobot.org">Maintained by Patrick Goebel</author>
<buildtool_depend>catkin</buildtool_depend>
<run_depend>rbx1_description</run_depend>
<run_depend>rbx1_speech</run_depend>
<run_depend>rbx1_dynamixels</run_depend>
<run_depend>rbx1_nav</run_depend>
<run_depend>rbx1_apps</run_depend>
<run_depend>rbx1_bringup</run_depend>
<run_depend>rbx1_vision</run_depend>
<export>
<metapackage/>
</export>
</package>注意到上面的run_depend了吗?这里是run_depend的运行时依赖,其中的一些package会依赖另外的一些package。也就是说当我们metapackage下的package互相依赖时,是需要加入到与metapackage同名目录下的xml中的。
ROS官网我印象中看到过xml里export的相关内容,但是没有找到。有找到的小伙伴可以留言提醒一下,先谢谢了。
ROS官方的github上有一点关于metapackage xml的内容
















 2785
2785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











