







Ubuntu16.04 ROS kinetic 版本的rivz教程
我们学习rivz时需要一个大神写好的第三方包,这样我们才可以学习具体的命令以及方法。博主在从网上找rivz的教程时发现大部分都比较老了,不支持ROS的kinetic版本,所以提供的rivz第三方包安装会出现许多坑。博主经过几次踩坑后把经验分享出来。
学习rivz,首先需要安装arbotix。但是因为arbotix_ros没有kinetic版本,所以apt-get install ros-kinetic-arbotix-*是不管用的,所以你需要
git clone https://github.com/vanadiumlabs/arbotix_ros.git。
在
catkin_ws/src
中使用git clone https://github.com/vanadiumlabs/arbotix_ros.git命令,然后回到catkin_ws目录,使用catkin_make

这样就解决了arbotix的安装问题
接下来我们需要安装用来测试与学习的rivz第三方包 rbx_vol_1。
同理回到catkin_ws/src 中使用 git clone https://github.com/pirobot/rbx1 命令下载rbx_vol_1 包。
下载完成也需要catkin_make 这一步与上面是一样的方法。
编译结束后我们就可以使用
roslaunch rbx1_bringup fake_pi_robot.launch 命令运行模拟机器人了(别忘了运行 roscore 命令)
然后运行
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz即可看到小车仿真
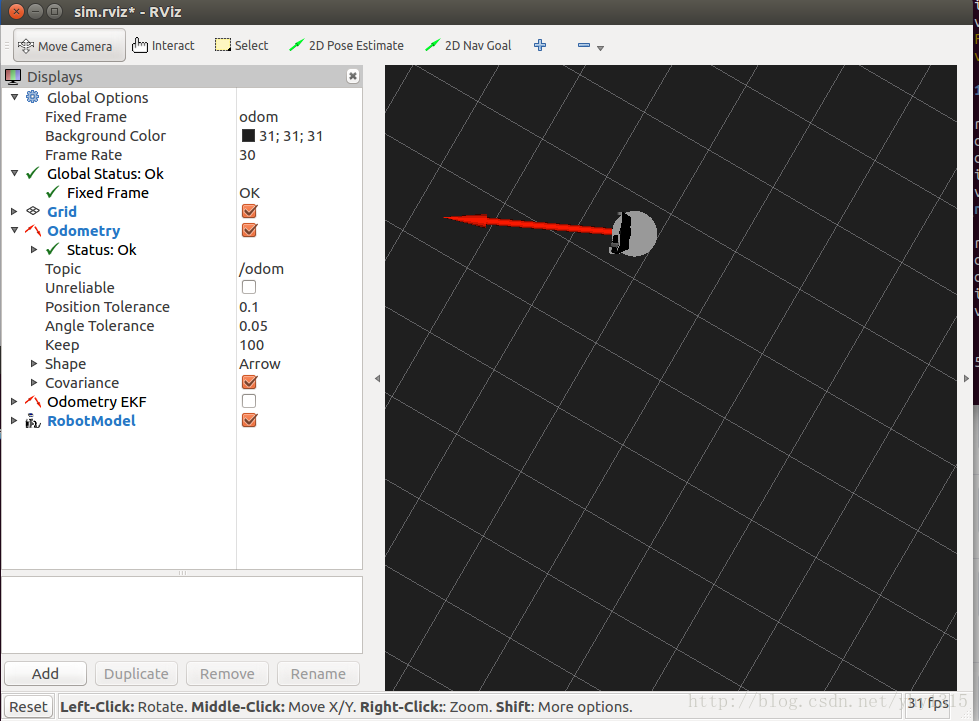
接下来就可以根据古月居中的教程进行学习了ROS探索总结(四)——简单的机器人仿真
文档结构
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









