







1、ROS2 graph
The ROS graph is a network of ROS 2 elements processing data together at one time. It encompasses all executables and the connections between them if you were to map them all out and visualize them.
ROS图是由ROS 2元素同时处理数据的网络。 如果要将它们全部映射并可视化,则它包含所有可执行文件及其之间的连接。
2、Nodes in ROS2
每个模块都有一个他负责干的专门的事情(a single, module purpose)
每个模块都可以通过 topics, services, actions, or parameters 来收发数据
一个机器人系统需要多个模块协同工作。(在ROS2 中,单个可执行程序可以包含一个或多个节点)
3、练习
命令:ros2 run
命令的参数含义:第一个为包名第二个为应用程序名
The command ros2 run launches an executable from a package.
ros2 run <package_name> <executable_name>
#To run turtlesim, open a new terminal, and enter the following command:
ros2 run turtlesim turtlesim_nodeThe turtlesim window will open, as you saw in the previous tutorial.
Here, the package name is turtlesim and the executable name is turtlesim_node.
We still don’t know the node name, however. You can find node names by using ros2 node list
命令: ros2 node list
用途:显示正在运行的节点的名字
(ros2 node list will show you the names of all running nodes.
This is especially useful when you want to interact with a node, or when you have a system running many nodes and need to keep track of them.)
#Open a new terminal while turtlesim is still running in the other one, and enter the following command:
ros2 node list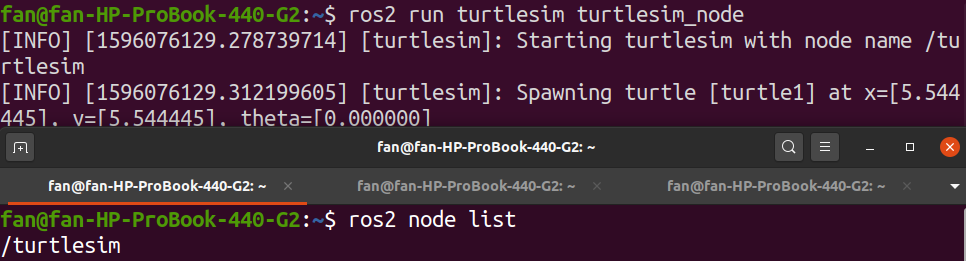
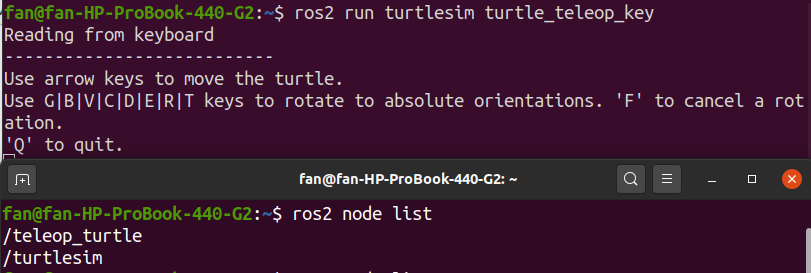
#Open another new terminal and start the teleop node with the command:
ros2 run turtlesim turtle_teleop_key#Here, we are searching the turtlesim package again, this time for the executable named turtle_teleop_key.
#Return to the terminal where you ran ros2 node list and run it again. You will now see the names of two active nodes:
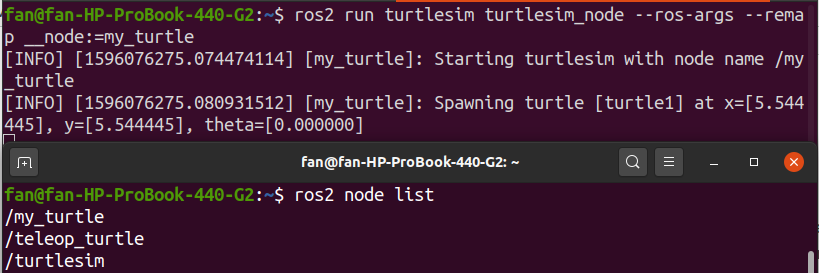
命令:remapping
功能:修改默认的节点参数
(Remapping allows you to reassign default node properties, like node name, topic names, service names, etc., to custom values. In the last tutorial, you used remapping on turtle_teleop_key to change the default turtle being controlled.)
#Now, lets reassign the name of our /turtlesim node. In a new terminal, run the following command:
ros2 run turtlesim turtlesim_node --ros-args --remap __node:=my_turtle#Since you’re calling ros2 run on turtlesim again, another turtlesim window will open. However, now if you return to the terminal where you ran ros2 node list, and run it again, you will see three node names:
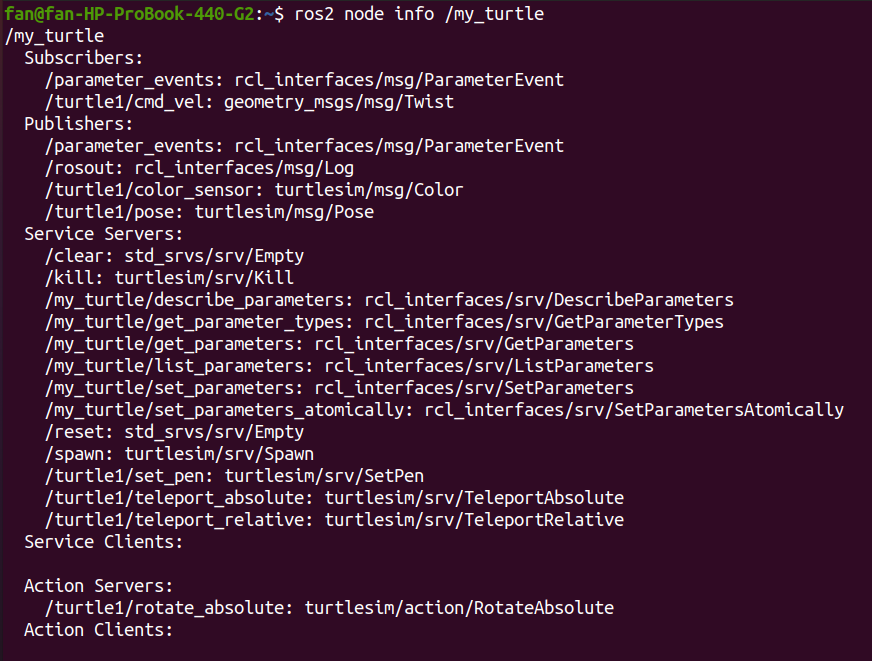
命令: ros2 node info
功能:通过节点的名称来了解节点的详细信息
Now that you know the names of your nodes, you can access more information about them with:
ros2 node info <node_name>
#To examine your latest node, my_turtle, run the following command:
ros2 node info /my_turtle















 2571
2571











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









