







平面五连杆机构分析
平面五连杆机构参数
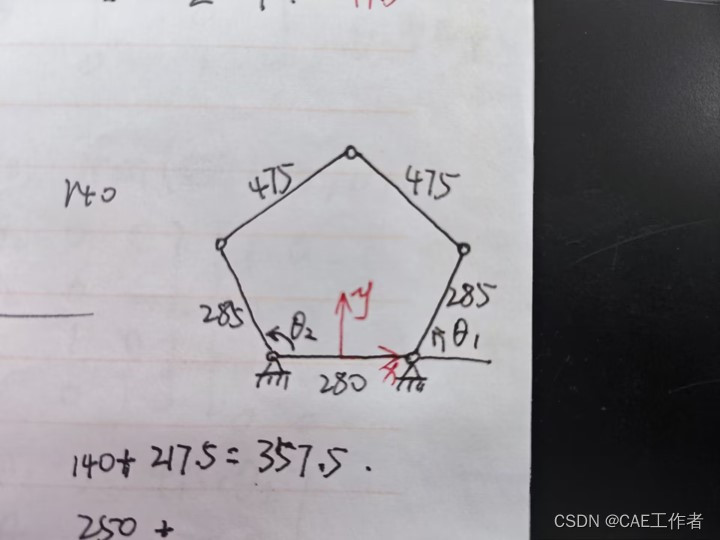
建立模型
LR(1) = Link( 'd', 0.0855 , 'a' , 0.285 , 'alpha', 0 , 'offset',pi/2);
LR(2) = Link( 'd', 0 , 'a' , 0.475 , 'alpha', 0 , 'offset',0);
LR(3) = Link( 'd', 0 , 'a' , 0 , 'alpha', 0 , 'offset',0);
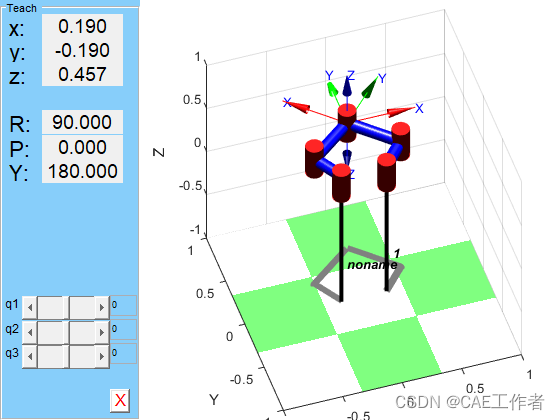
robot_left_rear = SerialLink(LR); %建立三自由度模型
robot_left_rear.display(); %显示建立的机器人的DH参数
robot_left_rear.base=transl(-0.190,0,0.37125);
h=1;
robot_left_rear.plotopt = {'workspace',[-h,h,-h,h,-h,h],'tilesize',h}; %设置模型空间大小和地砖大小
robot_left_rear.teach; %画出模型并进行调控
init_angle=[(121.43-90)*pi/180,-(180-97.31)*pi/180,0];
T=robot_left_rear.fkine(init_angle)
xyz=transl(T);
T1=transl(xyz);
init_angle=robot_left_rear.ikunc(T1);
robot_left_rear.plot(init_angle)
建立模型
运动仿真视频
平面五连杆机构分析仿真
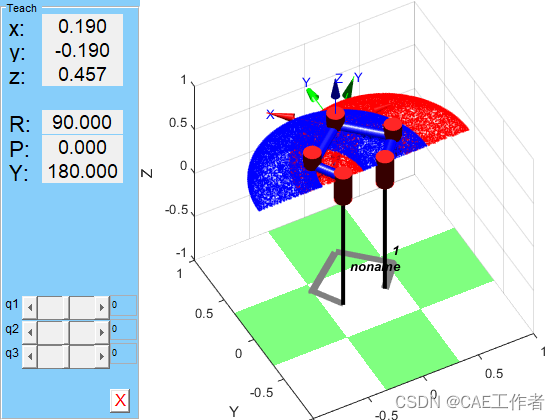
运动空间仿真


















 9723
9723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











