







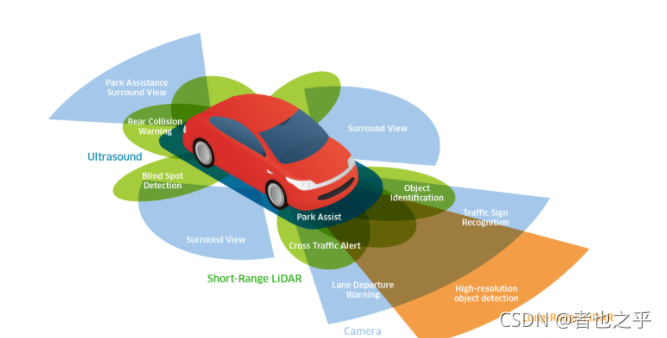
无人驾驶汽车为了保障行驶过程中的安全性,充分感知周围环境,采用了种类丰富的传感器。常见的有激光雷达、相机、毫米波雷达、超声波和惯性导航单元等。
激光雷达:按线数分有1、4、8、16、32、40、64、128线等,按工作原理分有机械旋转式和固态式,而固态又分为MEMS型、Flash型、相控阵型。因为机械式技术相对成熟,可选择的产品丰富,目前大部分还是在用机械旋转式。激光雷达的优点是不依赖环境光源、测距精度高,可以达到cm级,缺点是会受雨水、阳光影响,且因为是主动发射激光,具有镜面效应。
相机:按工作原理分为普通相机、红外相机。RGB相机可以构成单目、双目的应用;红外相机分为被动式与主动式;单目的测距精度一般会比较低为米级~十米级不等,但测距范围可以做到很大,只要能检测到目标就能估计出距离,而双目可以显著提高测距精度,但测距范围受基线长度影响,一般可以做到300~400米的距离。普通摄像头在没有光照,此时红外相机的优势便突显出来。被动式红外相机只能接收由物体散发出来的红外光,相比与主动式,效果稍差,主动式红外的感知范围可以通过调整补光强度来控制,感知距离也可以做到几百米。
毫米波雷达:是目前最成熟的车载传感器,按测距范围可以划分成短距、中距和长距,按频段划分国内有24GHz和77GHz两种,77G相对于24G来说,角分辨率会更高一些。具有极好的可靠性和天气适应性,但没有高度信息,且测量精度较低。
整体来看,无人驾驶汽车使用单一传感器,必然存在一些弊端无法弥补,使得感知系统存在风险。实际上,也确实发生过重大的事故,例如只用摄像头,不能很好区分前方白色的卡车和云朵,导致撞车事故。如果只用雷达,在玻璃墙面前,可能会直接透过,认为是一套空旷的道路这种情况。在考虑整体成本、使用场景、天气条件等综合因素的前提下,尽可能多的采用组合式的传感器感知系统,弥补不同传感器本身的缺陷,是一个更加安全可靠的选择。















 2431
2431











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









