






今天是5月的31号,是5月的最后一天,看着上海的疫情即将结束,经历了两个月的漫长战斗,终于取得了胜利。上篇主要写了MDNet目标跟踪算法,今天这篇主要写写RTT目标跟踪算法。
1.什么是RTT目标跟踪算法
RTT,全称Recurrently Target-attennding Tracking,一种循环网络进行目标跟踪的方法。主要目的是为了解决目标遮挡的问题循环神经网络的作用是得到置信度图。
2.RTT目标跟踪算法原理
RTTt目标跟踪算法主要包括以下步骤:
(1)给定一个视频帧,确定一个小的候选区域,该区域是前一帧中定位结果周围的边界框大小的2.5倍,
(2)对于该候选区域,使用网格状分区来产生视觉部分,
(3)提取每个部分的特征以用于下一个跟踪。
(4)获得基于部件的功能
d个的每个候选区区域的频道,其中h,w是空间部分/网格的高度和宽度。
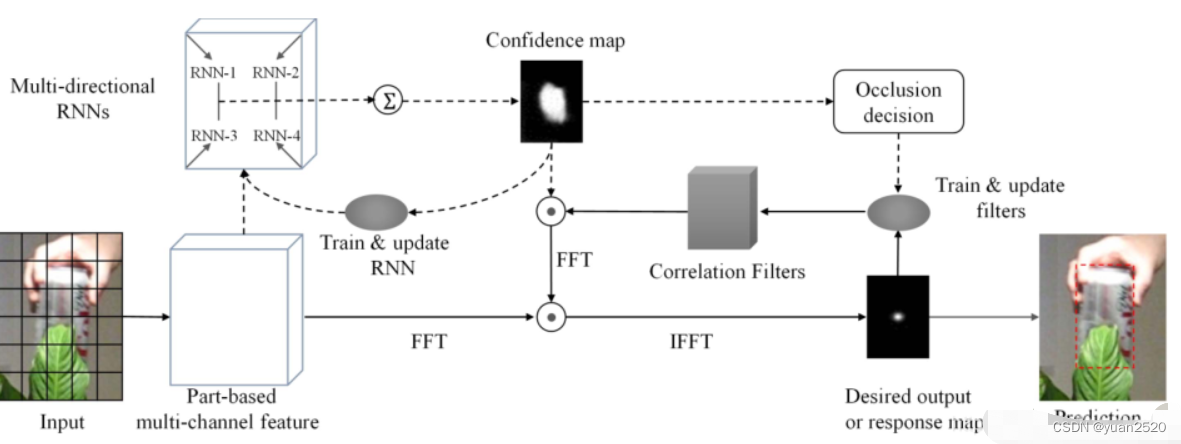
其算法框架可以表示为:
3.RTT目标跟踪算法优缺点
优点:
(1)生成的目标表示在某种程度上是平移不变的;
, (2) 可以减轻在一个分开的方向上发生的遮挡的负面影响;
(3) 可以产生与部件相关联的更准确的检测置信度图;
(4) 与其他复杂结构的图形模型相比,多方向RNN非常简单且易于实现。















 1748
1748











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









