











首先要知道这两个传感器发布的ROS消息格式:
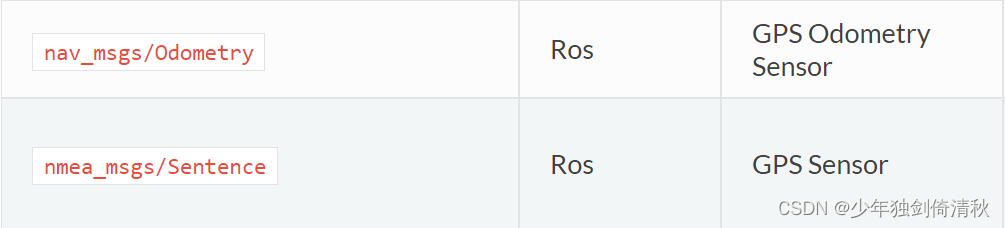
在开发之前,需要在ROS环境中安装这两个msg。
sudo apt install ros-melodic-nmea-msgs
sudo apt install ros-melodic-nav-msgs
GPS Device Sensor
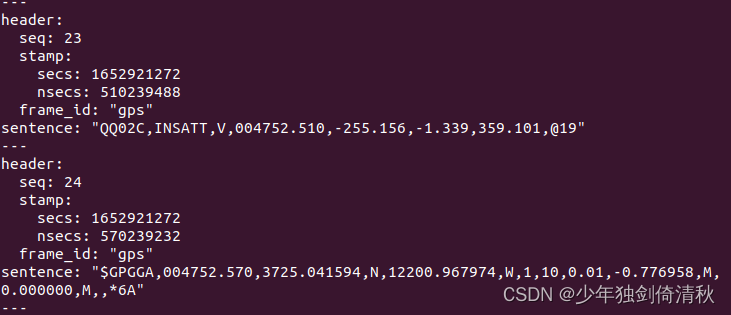
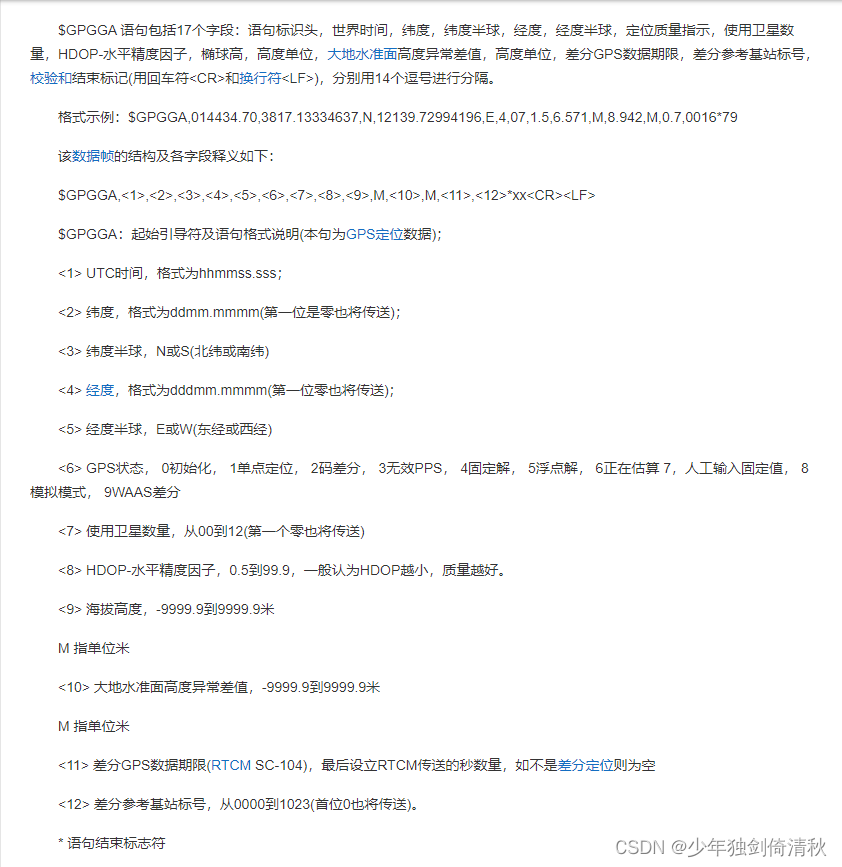
发布的格式是GPGGA格式,需要经纬度信息的可以直接从字符串中取。
GPS Odometer Sensor

这里的position指的是UTM坐标系下的xyz,orientation是在UTM坐标系下的四元数,也是车辆的姿态。
如果需要车辆的航向角Heading,可以使用以下方法获取:
四元数->欧拉角->航向角
tf::Quaternion quat;
tf::quaternionMsgToTF(odom_msg.pose.pose.orientation, quat);
double roll, pitch, yaw;
tf::Matrix3x3(quat).getRPY(roll, pitch, yaw);
heading = -1 * (yaw - PI / 2) / PI * 180.0;
if(heading<0)
{
heading = heading + 360.0;
}
















 1892
1892











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









