







 超级会员免费看
超级会员免费看
话题 /camera/color/camera_info
消息格式 sensor_msgs/CameraInfo
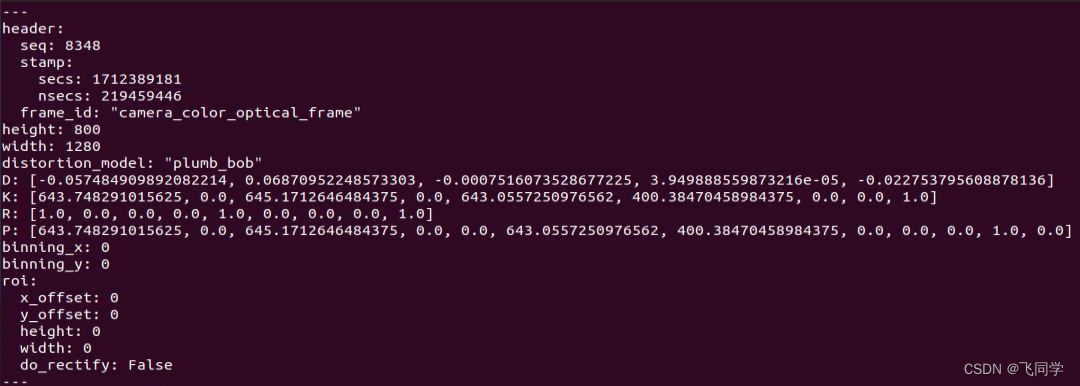
distortion_model:指定了相机畸变模型,"plumb_bob"简单的径向和切向畸变模型
D:畸变参数,取决于畸变模型,(k1, k2, t1, t2, k3),
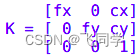
K:相机内参矩阵,使用焦距(fx, fy)和主点坐标(cx, cy),单位为像素,内参矩阵可以将相机坐标中的3D点投影到2D像素坐标
R:旋转矩阵,将相机坐标系统对准理想的立体图像平面,使两张立体图像中的极线平行
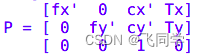
P:投影矩阵
对应r3live中参数

camera_intrinsic 相机内参矩阵
camera_dist_coeffs 相机的畸变系数。
camera_ext_R 旋转矩阵
camera_ext_t 平移矩阵
















 505
505











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











