







 超级会员免费看
超级会员免费看
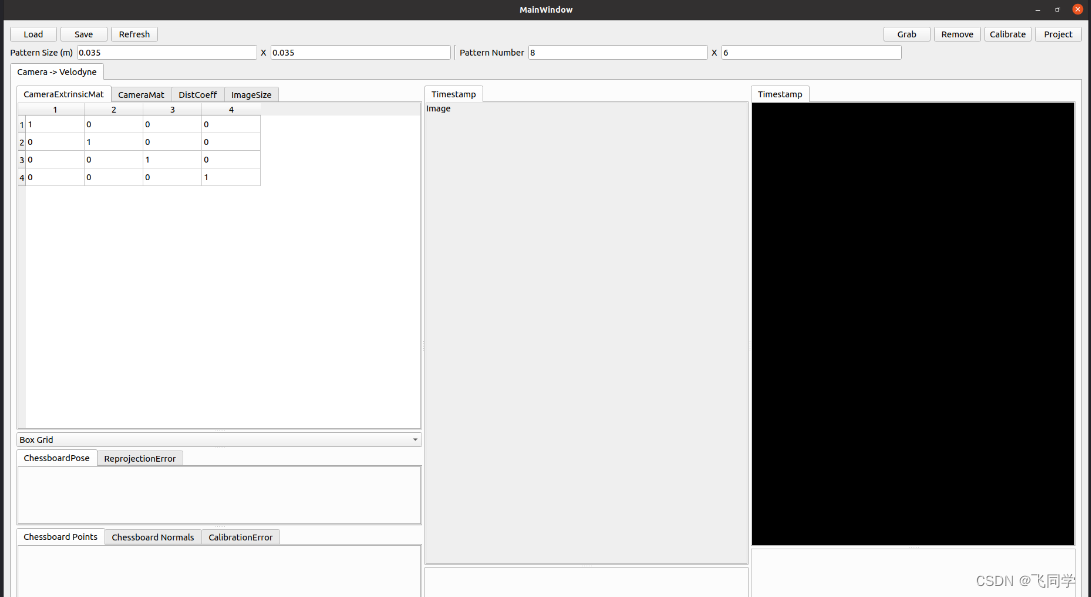
不想使用autoware的docker怎么办,那就把相机雷达联合标定包calibration_toolkit分离出来
固态激光雷达输出的点云是不稳定而且稀疏的,这导致选点的过程并不准确,所以固态激光雷达没法直接用autoware标定,需要llivox输出的点云五帧叠加为一帧
autoware_camera_lidar_calibrator
https://github.com/FENGZHANG123/autoware_camera_lidar_calibrator
运行
rosrun calibration_camera_lidar calibration_toolkit
autoware接收图片格式 sensor_msg/image
小键盘的使用说明
移动点云:上下左右方向键、PgUp、PgDn
旋转点云:a、d、w、s、q、e
切换模式:数字“1”,“2”用来设置是perspective projection透视投影还是orthogonal projection正交投影。
视角缩放:减号缩小、加号放大
点云大小:o 键使用小点云、p 使用大点云
改变点云窗口背景颜色:b
长按减号键“-”,把点云放大,直到可以看到标定板为止
- 和 + 缩放视角
- 长按按键“E”,把点云调正,根据该款固态激光雷达只有120度水平视场的特点,当左右各有一半点云的时候为正

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1463
1463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











