






参考文献
https://blog.csdn.net/weixin_43321489/article/details/133312281
https://blog.csdn.net/qq_20016593/article/details/132715941
The Cube Orange 标准套装
https://muginuav.en.made-in-china.com/product/cwmQPxIEIrWb/China-Pixhawk-Autopilot-The-Cube-Orange-Standard-Set.html
Ardupilot设备驱动 IIC、SPI、USART
https://www.cnblogs.com/BlogsOfLei/p/7745636.html
APM代码阅读(一):串口驱动
https://blog.51cto.com/u_15352549/6507034
ArduPilot之开源代码Sensor Drivers设计
https://blog.csdn.net/lida2003/article/details/130438349
前言
以测距传感器为例,介绍ArduPilot传感器开发流程
一、传感器代码结构
ardupilot中传感器驱动的重要结构是前台和后台分离。
第1步 Library库调用前端程序
第2步 前端程序调用后端程序
第3步 后端程序一般是个for循环
二、传感器初始化
以测距传感器为例,讲解ardupilot是如何初始化传感器驱动
1.void AP_Vehicle::setup()*
此函数仅在启动时调用一次。用于初始化一些必要的任务。此函数由 HAL 中的 main() 函数调用。
\libraries\AP_Vehicle\AP_Vehicle.cpp
void AP_Vehicle::setup()
{
init_ardupilot();
}
2.AP_Vehicle& vehicle = copter
\ArduCopter\ArduCopter.cpp
Copter copter;
AP_Vehicle& vehicle = copter;
3.void Copter::init_ardupilot()
init_ardupilot() 函数将处理空中重启所需的一切。稍后将确定飞行器是否真的在地面上,并在这种情况下处理地面启动。
\ArduCopter\system.cpp
void Copter::init_ardupilot()
{
init_rangefinder();
}
4.void Copter::init_rangefinder(void)
测距仪初始化。此函数会初始化朝下的测距仪
\ArduCopter\sensors.cpp
void Copter::init_rangefinder(void)
{
#if RANGEFINDER_ENABLED == ENABLED
rangefinder.set_log_rfnd_bit(MASK_LOG_CTUN);
rangefinder.init(ROTATION_PITCH_270);
rangefinder_state.alt_cm_filt.set_cutoff_frequency(g2.rangefinder_filt);
rangefinder_state.enabled = rangefinder.has_orientation(ROTATION_PITCH_270);
// upward facing range finder
rangefinder_up_state.alt_cm_filt.set_cutoff_frequency(g2.rangefinder_filt);
rangefinder_up_state.enabled = rangefinder.has_orientation(ROTATION_PITCH_90);
#endif
}
5.RangeFinder rangefinder
在 AP_Vehicle.h 文件中,我们用 RangeFinder 类定义了 rangefinder 对象。
\libraries\AP_Vehicle\AP_Vehicle.h
class AP_Vehicle : public AP_HAL::HAL::Callbacks {
{
protected:
RangeFinder rangefinder;
}
6.RangeFinder::init
所以,在跳转 init() 这个成员函数的时候,跳转到 RangeFinder 类的 init() 函数。
初始化 RangeFinder 类。将在这里检测已连接的测距仪。目前还不允许热插拔测距仪。
\libraries\AP_RangeFinder\AP_RangeFinder.cpp
void RangeFinder::init(enum Rotation orientation_default)
{
if (init_done) {
// init called a 2nd time?
return;
}
init_done = true;
convert_params();
// set orientation defaults
for (uint8_t i=0; i<RANGEFINDER_MAX_INSTANCES; i++) {
params[i].orientation.set_default(orientation_default);
}
for (uint8_t i=0, serial_instance = 0; i<RANGEFINDER_MAX_INSTANCES; i++) {
// serial_instance will be increased inside detect_instance
// if a serial driver is loaded for this instance
WITH_SEMAPHORE(detect_sem);
detect_instance(i, serial_instance);
if (drivers[i] != nullptr) {
// we loaded a driver for this instance, so it must be
// present (although it may not be healthy). We use MAX()
// here as a UAVCAN rangefinder may already have been
// found
num_instances = MAX(num_instances, i+1);
}
// initi
7.RangeFinder::detect_instance
检测是否连接了测距仪实例。
根据在文章开始介绍的 RNGFND1_TYPE 参数,选择不同传感器进行检测。
有三种通信后端可以选择
串口后端
IIC后端
SPI后端
此处,以 RNGFND1_TYPE(16) 中 AP_RangeFinder_VL53L0X 为例介绍I2C后端。
前端代码通过指定IIC设备的地址而对IIC实例对象进行初始化,初始化代码位于RangeFinder.cpp文件中的RangeFinder::detect_instance函数中:
其中,hal.i2c_mgr->get_device(…)
通过指定IIC地址在总线上得到对应设备
\libraries\AP_RangeFinder\AP_RangeFinder.cpp
void RangeFinder::detect_instance(uint8_t instance, uint8_t& serial_instance)
{
const Type _type = (Type)params[instance].type.get();
switch (_type) {
case Type::PLI2C:
case Type::PLI2CV3:
case Type::PLI2CV3HP:
FOREACH_I2C(i) {
if (_add_backend(AP_RangeFinder_PulsedLightLRF::detect(i, state[instance], params[instance], _type),
instance)) {
break;
}
}
break;
...
//I2C后端
case Type::VL53L0X:
case Type::VL53L1X_Short:
FOREACH_I2C(i) {
if (_add_backend(AP_RangeFinder_VL53L0X::detect(state[instance], params[instance],
hal.i2c_mgr->get_device(i, params[instance].address)),
instance)) {
break;
}
if (_add_backend(AP_RangeFinder_VL53L1X::detect(state[instance], params[instance],
hal.i2c_mgr->get_device(i, params[instance].address),
_type == Type::VL53L1X_Short ? AP_RangeFinder_VL53L1X::DistanceMode::Short :
AP_RangeFinder_VL53L1X::DistanceMode::Long),
instance)) {
break;
}
}
break;
...
//串口后端
case Type::LWSER:
if (AP_RangeFinder_LightWareSerial::detect(serial_instance)) {
_add_backend(new AP_RangeFinder_LightWareSerial(state[instance], params[instance]), instance, serial_instance++);
}
三、后端调用
1.I2C后端
此处,以 RNGFND1_TYPE(16) 中 AP_RangeFinder_VL53L0X 为例介绍I2C后端。
1.1 hal.i2c_mgr->get_device
(1)
\libraries\AP_HAL\I2CDevice.h
class I2CDeviceManager {
public:
/* Get a device handle */
virtual OwnPtr<AP_HAL::I2CDevice> get_device(uint8_t bus, uint8_t address,
uint32_t bus_clock=400000,
bool use_smbus = false,
uint32_t timeout_ms=4) = 0;
/*
* Get device by looking up the I2C bus on the buses from @devpaths.
*
* Each string in @devpaths are possible locations for the bus. How the
* strings are implemented are HAL-specific. On Linux this is the info
* returned by 'udevadm info -q path /dev/i2c-X'. The first I2C bus
* matching a prefix in @devpaths is used to create a I2CDevice object.
*/
virtual OwnPtr<I2CDevice> get_device(std::vector<const char *> devpaths,
uint8_t address) {
// Not implemented
return nullptr;
}
(2)
\libraries\AP_HAL_Linux\I2CDevice.cpp
如果当前的 bus 没有超过 i2c_bus_desc,会 new 一个新的 I2CDevice 类对象返回。
AP_HAL::OwnPtr<AP_HAL::I2CDevice>
I2CDeviceManager::get_device(std::vector<const char *> devpaths, uint8_t address)
{
const char *dirname = "/sys/class/i2c-dev/";
struct dirent *de = nullptr;
DIR *d;
d = opendir(dirname);
if (!d) {
AP_HAL::panic("Could not get list of I2C buses");
}
for (de = readdir(d); de; de = readdir(d)) {
char *str_device, *abs_str_device;
const char *p;
if (strcmp(de->d_name, ".") == 0 || strcmp(de->d_name, "..") == 0) {
continue;
}
if (asprintf(&str_device, "%s/%s", dirname, de->d_name) < 0) {
continue;
}
abs_str_device = realpath(str_device, nullptr);
if (!abs_str_device || !(p = startswith(abs_str_device, "/sys/devices/"))) {
free(abs_str_device);
free(str_device);
continue;
}
auto t = std::find_if(std::begin(devpaths), std::end(devpaths),
[p](const char *prefix) {
return startswith(p, prefix) != nullptr;
});
free(abs_str_device);
free(str_device);
if (t != std::end(devpaths)) {
unsigned int n;
/* Found the bus, try to create the device now */
if (sscanf(de->d_name, "i2c-%u", &n) != 1) {
AP_HAL::panic("I2CDevice: can't parse %s", de->d_name);
}
if (n > UINT8_MAX) {
AP_HAL::panic("I2CDevice: bus with number n=%u higher than %u",
n, UINT8_MAX);
}
closedir(d);
return get_device(n, address);
}
}
1.2.AP_RangeFinder_VL53L0X::detect(…)
检测是否连接了 VL53L0X 测距仪。我们将通过 I2C 读取数据来进行检测。如果得到结果,则表示传感器已连接。
首先会根据传入的参数,new 一个 AP_RangeFinder_VL53L0X 类对象。
然后读取测距仪固有的产品 ID 是否正确(sensor->check_id()),再对测距仪进行必要的初始化(sensor->init())。
\libraries\AP_RangeFinder\AP_RangeFinder_VL53L0X.cpp
AP_RangeFinder_Backend *AP_RangeFinder_VL53L0X::detect(RangeFinder::RangeFinder_State &_state, AP_RangeFinder_Params &_params, AP_HAL::OwnPtr<AP_HAL::I2CDevice> dev)
{
if (!dev) {
return nullptr;
}
AP_RangeFinder_VL53L0X *sensor
= new AP_RangeFinder_VL53L0X(_state, _params, std::move(dev));
if (!sensor) {
delete sensor;
return nullptr;
}
sensor->dev->get_semaphore()->take_blocking();
if (!sensor->check_id() || !sensor->init()) {
sensor->dev->get_semaphore()->give();
delete sensor;
return nullptr;
}
sensor->dev->get_semaphore()->give();
return sensor;
}
在7中的void RangeFinder::detect_instance函数中调用AP_RangeFinder_VL53L0X::detect函数
1.3 bool AP_RangeFinder_VL53L0X::check_id(void)
检查测距仪 ID 寄存器。每种类型测距仪的 ID 寄存器都有唯一值。
bool AP_RangeFinder_VL53L0X::check_id(void)
{
uint8_t v1, v2;
if (!dev->read_registers(0xC0, &v1, 1) ||
!dev->read_registers(0xC1, &v2, 1) ||
v1 != 0xEE ||
v2 != 0xAA) {
return false;
}
printf("Detected VL53L0X on bus 0x%x\n", dev->get_bus_id());
return true;
}
1.4 bool AP_RangeFinder_VL53L0X::init()
初始化传感器,并注册测距仪的周期运行函数 timer()。
bool AP_RangeFinder_VL53L0X::init() {
{
...
通过I2C向传感器寄存器写入初始值。
...
// call timer() every 50ms. We expect new data to be available every 50ms
dev->register_periodic_callback(50000, FUNCTOR_BIND_MEMBER(&AP_RangeFinder_VL53L3CX::timer, void));
return true;
}
1.5 void AP_RangeFinder_VL53L0X::timer(void)
20Hz 调用一次该函数,读取测距仪的测量值。
void AP_RangeFinder_VL53L0X::timer(void)
{
uint16_t range_mm;
if (get_reading(range_mm) && range_mm < 8000) {
sum_mm += range_mm;
counter++;
}
}
1.6 AP_RangeFinder_VL53L0X::get_reading函数
// read - return last value measured by sensor
bool AP_RangeFinder_VL53L0X::get_reading(uint16_t &reading_mm)
{
if ((read_register(RESULT_INTERRUPT_STATUS) & 0x07) == 0) {
if (AP_HAL::millis() - start_ms > 200) {
start_continuous();
}
return false;
}
// assumptions: Linearity Corrective Gain is 1000 (default);
// fractional ranging is not enabled
reading_mm = read_register16(RESULT_RANGE_STATUS + 10);
write_register(SYSTEM_INTERRUPT_CLEAR, 0x01);
return true;
}
2.串口后端
此处以获取LightWare数据,为例介绍串口后端。
2.1 RangeFinder::_add_backend函数
\libraries\AP_RangeFinder\AP_RangeFinder.cpp
bool RangeFinder::_add_backend(AP_RangeFinder_Backend *backend, uint8_t instance, uint8_t serial_instance)
{
if (!backend) {
return false;
}
if (instance >= RANGEFINDER_MAX_INSTANCES) {
AP_HAL::panic("Too many RANGERS backends");
}
if (drivers[instance] != nullptr) {
// we've allocated the same instance twice
INTERNAL_ERROR(AP_InternalError::error_t::flow_of_control);
}
backend->init_serial(serial_instance);
drivers[instance] = backend;
num_instances = MAX(num_instances, instance+1);
return true;
}
2.2 AP_RangeFinder_Backend_Serial::init_serial函数
此处以获取LightWare数据为例,首先需通过serial_manager类和用户设置的参数获取串口设备对象实例
\libraries\AP_RangeFinder\AP_RangeFinder_Backend_Serial.cpp
void AP_RangeFinder_Backend_Serial::init_serial(uint8_t serial_instance)
{
uart = AP::serialmanager().find_serial(AP_SerialManager::SerialProtocol_Rangefinder, serial_instance);
if (uart != nullptr) {
uart->begin(initial_baudrate(serial_instance), rx_bufsize(), tx_bufsize());
}
}
2.3 AP_RangeFinder_Backend_Serial::detect函数
\libraries\AP_RangeFinder\AP_RangeFinder_Backend_Serial.cpp
bool AP_RangeFinder_Backend_Serial::detect(uint8_t serial_instance)
{
return AP::serialmanager().have_serial(AP_SerialManager::SerialProtocol_Rangefinder, serial_instance);
}
2.4 AP_SerialManager::have_serial函数
\libraries\AP_SerialManager\AP_SerialManager.cpp
// have_serial - return true if we have the given serial protocol configured
bool AP_SerialManager::have_serial(enum SerialProtocol protocol, uint8_t instance) const
{
return find_protocol_instance(protocol, instance) != nullptr;
}
2.5 AP_SerialManager::UARTState *AP_SerialManager::find_protocol_instance函数
\libraries\AP_SerialManager\AP_SerialManager.cpp
const AP_SerialManager::UARTState *AP_SerialManager::find_protocol_instance(enum SerialProtocol protocol, uint8_t instance) const
{
uint8_t found_instance = 0;
// search for matching protocol
for(uint8_t i=0; i<SERIALMANAGER_NUM_PORTS; i++) {
if (protocol_match(protocol, (enum SerialProtocol)state[i].protocol.get())) {
if (found_instance == instance) {
return &state[i];
}
found_instance++;
}
}
// if we got this far we did not find the uart
return nullptr;
}
3.SPI后端
....
四、前端调用
1.前端
1.1 SCHED_TASK(read_rangefinder, 20, 100, 33)函数
Copter.cpp 文件的周期任务列表中注册了一个线程:SCHED_TASK(read_rangefinder, 20, 100, 33)
注册了调用频率为 20Hz 的 read_rangefinder() 函数。
在\ArduCopter\Copter.cpp中
const AP_Scheduler::Task Copter::scheduler_tasks[] = {
...
SCHED_TASK(read_rangefinder, 20, 100, 33),
...
}
1.2 read_rangefinder函数
在 sensors.cpp 文件中,read_rangefinder()调用rangefinder.update()函数
以厘米为单位返回测距仪高度
sensors.cpp文件中包含有调用设备驱动前端代码,例如飞控控制以20HZ的频率调用read_rangefinder()函数而读取高度数据,而该函数内部则调用了rangefinder.update()前端代码来获取数据
在\ArduCopter\sensors.cpp中
void Copter::read_rangefinder(void)
{
#if RANGEFINDER_ENABLED == ENABLED
//通过传感器更新高度数据
rangefinder.update();
...
}
1.3 RangeFinder::update函数
update实现代码在:
\libraries\AP_RangeFinder\AP_RangeFinder.cpp中
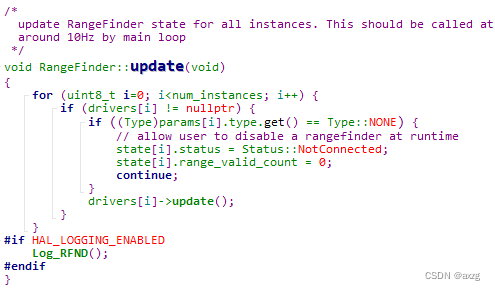
1.4 调用传感器类中的update函数
(1)
AP_RangeFinder_VL53L0X 对象
根据 返回的 AP_RangeFinder_VL53L0X 对象,调用 AP_RangeFinder_VL53L0CX 类中的 update() 函数。
\libraries\AP_RangeFinder\AP_RangeFinder_VL53L0X.cpp中
void AP_RangeFinder_VL53L0X::update(void)
{
if (counter > 0) {
state.distance_m = (sum_mm * 0.001f) / counter;
state.last_reading_ms = AP_HAL::millis();
sum_mm = 0;
counter = 0;
update_status();
} else {
set_status(RangeFinder::Status::NoData);
}
}
(2)
如果返回的为AP_RangeFinder_LightWareSerial,调用 AP_RangeFinder_Backend_Serial中的 update() 函数。
libraries\AP_RangeFinder\AP_RangeFinder_Backend_Serial.cpp中
void AP_RangeFinder_Backend_Serial::update(void)
{
//获取缓冲区中获取的原始数据,并且将处理后的数据保存至distance_cm中,数据为true,否则为false
if (get_reading(state.distance_m)) {
// update range_valid state based on distance measured
state.last_reading_ms = AP_HAL::millis();//获取当前系统运行时间
//判断distance_cm数据情况,高于最大测量范围或者小于最小测量范围或者数据正常
update_status();
// 超过200ms缓冲没有数据
} else if (AP_HAL::millis() - state.last_reading_ms > read_timeout_ms()) {
set_status(RangeFinder::Status::NoData);
}
}
前端代码在读取串口数据之前,需每次调用update()方法获取串口接受缓冲区中的数据,update方法中则调用的get_reading()方法将数据读取的内存中进行数据处理。其中关于update的代码可见之前的rangefinder.update()代码的实现,另外get_reading()代码如下:
进入AP_RangeFinder_LightWareSerial::get_reading函数
\libraries\AP_RangeFinder\AP_RangeFinder_LightWareSerial.cpp
// read - return last value measured by sensor
bool AP_RangeFinder_LightWareSerial::get_reading(float &reading_m)
{
if (uart == nullptr) {
return false;
}
float sum = 0; // sum of all readings taken
uint16_t valid_count = 0; // number of valid readings
uint16_t invalid_count = 0; // number of invalid readings
// max distance the sensor can reliably measure - read from parameters
const int16_t distance_cm_max = max_distance_cm();
// read any available lines from the lidar
//检测串口接收缓冲区中的数据个数
int16_t nbytes = uart->available();
//将缓冲区的数据读出,可能会读到多组数据
while (nbytes-- > 0) {
//获取一个字符
char c = uart->read();
// use legacy protocol
if (protocol_state == ProtocolState::UNKNOWN || protocol_state == ProtocolState::LEGACY) {
//一组数据以'\r'为结尾
if (c == '\r') {
linebuf[linebuf_len] = 0;
const float dist = strtof(linebuf, nullptr);
if (!is_negative(dist) && !is_lost_signal_distance(dist * 100, distance_cm_max)) {
sum += dist;
valid_count++;
// if still determining protocol update legacy valid count
if (protocol_state == ProtocolState::UNKNOWN) {
legacy_valid_count++;
}
} else {
invalid_count++;
}
linebuf_len = 0;
//判断数据是否有效
} else if (isdigit(c) || c == '.' || c == '-') {
linebuf[linebuf_len++] = c;
if (linebuf_len == sizeof(linebuf)) {
// too long, discard the line
linebuf_len = 0;
}
}
}
// use binary protocol
if (protocol_state == ProtocolState::UNKNOWN || protocol_state == ProtocolState::BINARY) {
bool msb_set = BIT_IS_SET(c, 7);
if (msb_set) {
// received the high byte
high_byte = c;
high_byte_received = true;
} else {
// received the low byte which should be second
if (high_byte_received) {
const int16_t dist = (high_byte & 0x7f) << 7 | (c & 0x7f);
if (dist >= 0 && !is_lost_signal_distance(dist, distance_cm_max)) {
sum += dist * 0.01f;
valid_count++;
// if still determining protocol update binary valid count
if (protocol_state == ProtocolState::UNKNOWN) {
binary_valid_count++;
}
} else {
invalid_count++;
}
}
high_byte_received = false;
}
}
}
// protocol set after 10 successful reads
if (protocol_state == ProtocolState::UNKNOWN) {
if (binary_valid_count > 10) {
protocol_state = ProtocolState::BINARY;
} else if (legacy_valid_count > 10) {
protocol_state = ProtocolState::LEGACY;
}
}
uint32_t now = AP_HAL::millis();
if (last_init_ms == 0 ||
(now - last_init_ms > 1000 &&
now - state.last_reading_ms > 1000)) {
// send enough serial transitions to trigger LW20 into serial
// mode. It starts in dual I2C/serial mode, and wants to see
// enough transitions to switch into serial mode.
uart->write("www\r\n");
last_init_ms = now;
} else {
uart->write('d');
}
// return average of all valid readings
if (valid_count > 0) {
reading_m = sum / valid_count;
no_signal = false;
return true;
}
// all readings were invalid so return out-of-range-high value
if (invalid_count > 0) {
reading_m = MIN(MAX(LIGHTWARE_DIST_MAX_CM, distance_cm_max + LIGHTWARE_OUT_OF_RANGE_ADD_CM), UINT16_MAX) * 0.01f;
no_signal = true;
return true;
}
// no readings so return false
return false;
}
总结
以上就是今天要讲的内容,本文介绍ArduPilot的·rangefinder。

















 814
814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









