







文章目录
- 前言
- 一、roll pitch yaw throtttle
- 二、rc_in()和rc_out()初始化
- 三、电机初始化
- 二、电机pwm计算
-
- 1.fast_loop()
- 2.motors_output()
- 3.virtual void output_to_motors()
- 4.output_to_motors()
- 5.MOTOR_CLASS *&motors
- 6.define MOTOR_CLASS AP_MotorsMulticopter
- 7.output()
- 8.output_logic()
- 9.AP_MotorsMatrix : public AP_MotorsMulticopter
- 10.output_armed_stabilizing()
- 11.output_to_motors()
- 12.rc_write(float actuator)
- 13.output_to_pwm(float actuator)
- 14.output_to_pwm(float actuator)
- 总结
参考文献
ardupilot 中电机输出逻辑及电机转轴状态分析
https://blog.csdn.net/lixiaoweimashixiao/article/details/126745495
APM(Ardupilot)——电机输出流程图
https://blog.csdn.net/yinxian5224/article/details/102743618
APM_ArduCopter源码解析学习(一)——ArduCopter主程序
https://blog.csdn.net/zhangfengmei1987/article/details/110432871
APM_ArduCopter源码解析学习(二)——电机库学习
https://blog.csdn.net/zhangfengmei1987/article/details/110448094?spm=1001.2014.3001.5502
PX4用户指南-飞行-基本操作
https://www.ncnynl.com/archives/201810/2666.html
Ardupilot动力分配-混控部分分析
https://blog.csdn.net/qq_15390133/article/details/123822392
ardupilot 中电机输出逻辑及电机转轴状态分析
https://download.csdn.net/blog/column/7327436/126745495
ardupilot 函数output_armed_stabilizing
https://download.csdn.net/blog/column/7327436/109166189
[飞控]从零开始建模(三)-控制分配浅析
https://zhuanlan.zhihu.com/p/46839430
RC输入通道映射(RCMAP)
https://doc.cuav.net/tutorial/copter/advanced-configuration/rc-input-channel-mapping.html
Apm飞控学习笔记-AC_PosControl位置控制-Cxm
https://blog.csdn.net/chen_taifu/article/details/124610904
ardupilot开发 — 位置控制与导航制导篇
https://blog.csdn.net/weixin_43321489/article/details/132362043
// pwm value is an actual pwm value that will be output, normally in the range of 1000 ~ 2000
rc_write(AP_MOTORS_MOT_1, pwm);
前言
本文介绍Ardupilot的电机模块相关知识。
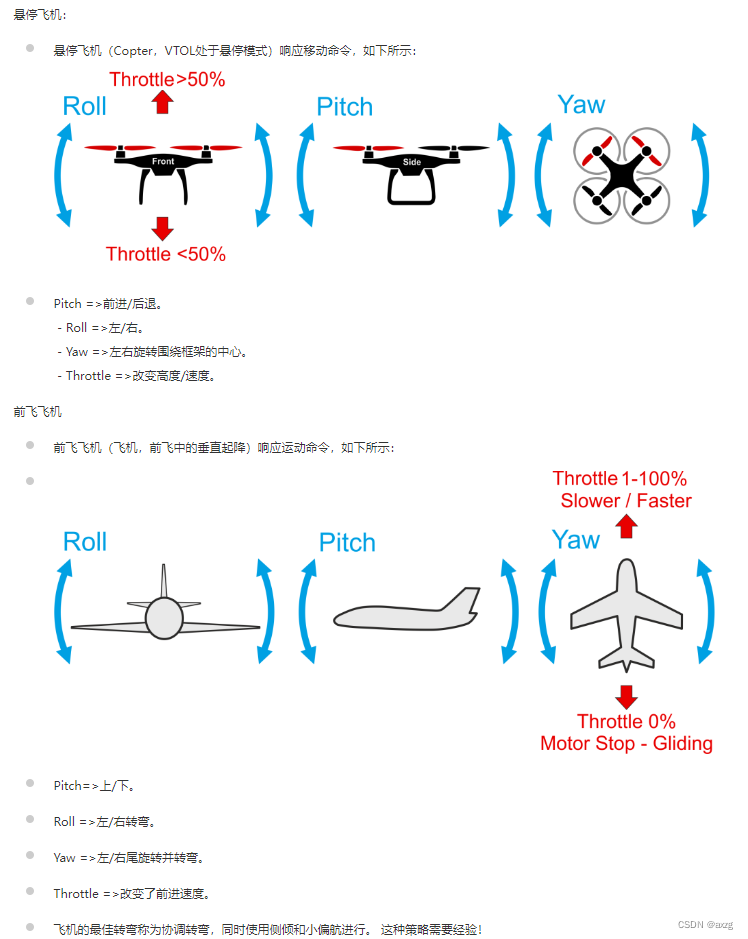
一、roll pitch yaw throtttle
roll pitch yaw throtttle
二、rc_in()和rc_out()初始化
1.Copter::init_ardupilot()
在void Copter::init_ardupilot()函数中调用init_rc_in()和init_rc_out()函数
\ardupilot\ardupilot\ArduCopter\system.cpp
void Copter::init_ardupilot()
{
...
#endif
#if FRAME_CONFIG == HELI_FRAME
input_manager.set_loop_rate(scheduler.get_loop_rate_hz());
#endif
init_rc_in(); // sets up rc channels from radio
...
allocate_motors();
...
rc().init();
// sets up motors and output to escs
init_rc_out();
...
}
2.init_rc_in()
\ArduCopter\radio.cpp
void Copter::init_rc_in()
{
channel_roll = rc().channel(rcmap.roll()-1);
channel_pitch = rc().channel(rcmap.pitch()-1);
channel_throttle = rc().channel(rcmap.throttle()-1);
channel_yaw = rc().channel(rcmap.yaw()-1);
// set rc channel ranges
设置rc通道范围
channel_roll->set_angle(ROLL_PITCH_YAW_INPUT_MAX);
channel_pitch->set_angle(ROLL_PITCH_YAW_INPUT_MAX);
channel_yaw->set_angle(ROLL_PITCH_YAW_INPUT_MAX);
channel_throttle->set_range(1000);
// set default dead zones
default_dead_zones();
// initialise throttle_zero flag
ap.throttle_zero = true;
}
3.init_rc_out()
比例因子的给定在init_rc_out()函数中完成的初始化
\ArduCopter\radio.cpp
// init_rc_out -- initialise motors
void Copter::init_rc_out()
{
motors->set_loop_rate(scheduler.get_loop_rate_hz());
motors->init((AP_Motors::motor_frame_class)g2.frame_class.get(), (AP_Motors::motor_frame_type)g.frame_type.get());
// enable aux servos to cope with multiple output channels per motor
SRV_Channels::enable_aux_servos();
// update rate must be set after motors->init() to allow for motor mapping
motors->set_update_rate(g.rc_speed);
#if FRAME_CONFIG != HELI_FRAME
if (channel_throttle->configured_in_storage()) {
// throttle inputs setup, use those to set motor PWM min and max if not already configured
motors->convert_pwm_min_max_param(channel_throttle->get_radio_min(), channel_throttle->get_radio_max());
} else {
// throttle inputs default, force set motor PWM min and max to defaults so they will not be over-written by a future change in RC min / max
motors->convert_pwm_min_max_param(1000, 2000);
}
motors->update_throttle_range();
#else
// setup correct scaling for ESCs like the UAVCAN ESCs which
// take a proportion of speed.
hal.rcout->set_esc_scaling(channel_throttle->get_radio_min(), channel_throttle->get_radio_max());
#endif
// refresh auxiliary channel to function map
SRV_Channels::update_aux_servo_function();
#if FRAME_CONFIG != HELI_FRAME
/*
setup a default safety ignore mask, so that servo gimbals can be active while safety is on
*/
uint16_t safety_ignore_mask = (~copter.motors->get_motor_mask()) & 0x3FFF;
BoardConfig.set_default_safety_ignore_mask(safety_ignore_mask);
#endif
}
三、电机初始化
1.MULTICOPTER_FRAME
\ArduCopter\config.h
// FRAME_CONFIG
//
#ifndef FRAME_CONFIG
# define FRAME_CONFIG MULTICOPTER_FRAME
#endif
2.AP_MotorsMulticopter
在Copter.h中定义的Copter类中,指明了其所使用的电机类型
\ArduCopter\Copter.h
#if FRAME_CONFIG == HELI_FRAME
#define MOTOR_CLASS AP_MotorsHeli
#else
#define MOTOR_CLASS AP_MotorsMulticopter
#endif
3.AP_MOTORS_MAX_NUM_MOTORS
\libraries\AP_Motors\AP_Motors_Class.h
#define AP_MOTORS_MAX_NUM_MOTORS 12
4.AP_MotorsMatrix
t\libraries\AP_Motors\AP_MotorsMatrix.h
class AP_MotorsMatrix : public AP_MotorsMulticopter {
}
ArduCopter的电机库配置位于libraries\AP_Motors路径下的AP_MotorsMulticopter.cpp/AP_MotorsMulticopter.h文件中。
5.scheduler_tasks
\ArduCopter\Copter.cpp
const AP_Scheduler::Task Copter::scheduler_tasks[] = {
...
SCHED_TASK(one_hz_loop, 1, 100, 81),
...
}
6.void Copter::one_hz_loop()
\ArduCopter\Copter.cpp
// one_hz_loop - runs at 1Hz
void Copter::one_hz_loop()
{
...
if (!motors->armed()) {
...
// check the user hasn't updated the frame class or type
motors->set_frame_class_and_type((AP_Motors::motor_frame_class)g2.frame_class.get(), (AP_Motors::motor_frame_type)g.frame_type.get());
...
}
...
}
7. set_frame_class_and_type
\libraries\AP_Motors\AP_MotorsMatrix.cpp
// set frame class (i.e. quad, hexa, heli) and type (i.e. x, plus)
void AP_MotorsMatrix::set_frame_class_and_type(motor_frame_class frame_class, motor_frame_type frame_type)
{
// exit immediately if armed or no change
if (armed() || (frame_class == _active_frame_class && _active_frame_type == frame_type)) {
return;
}
_active_frame_class = frame_class;
_active_frame_type = frame_type;
init(frame_class, frame_type);
}
8.AP_MotorsMatrix::init
配置电机初始化。
\libraries\AP_Motors\AP_MotorsMatrix.cpp
// init
void AP_MotorsMatrix::init(motor_frame_class frame_class, motor_frame_type frame_type)
{
// record requested frame class and type
_active_frame_class = frame_class;
_active_frame_type = frame_type;
if (frame_class == MOTOR_FRAME_SCRIPTING_MATRIX) {
// if Scripting frame class, do nothing scripting must call its own dedicated init function
return;
}
// setup the motors
setup_motors(frame_class, frame_type);
// enable fast channels or instant pwm
set_update_rate(_speed_hz);
}
9.setup_motors
这个函数最主要的内容就是配置电机,包括每个电机对于不同运动的影响程度(推力分配)。
(1)
函数刚开始,首先就是把最初的所有电机配置全部移除,方便后续进行更改。这里的AP_MOTORS_MAX_NUM_MOTORS为最大的电机数,于AP_Motors_Class.h中定义为12。
(2)
然后进入一个switch()函数中进行具体的配置内容,首先判断是属于哪一种frame_class的架构,ArduCopter这边给出了14种配置结构,定义于AP_Motors_Class.h中的枚举类型里,如下所示
(3)
以X型四旋翼进行说明:
add_motor()这个函数的作用就是配置每一个电机在某一运动功能上的影响因子,AP_MOTORS_MOT_1从右上角开始,逆时针进行编号增加。
\libraries\AP_Motors\AP_MotorsMatrix.cpp
void AP_MotorsMatrix::setup_motors(motor_frame_class frame_class, motor_frame_type frame_type)
{
// remove existing motors
for (int8_t i = 0; i < AP_MOTORS_MAX_NUM_MOTORS; i++) {
remove_motor(i);
}
...
switch (frame_class) {
...
case MOTOR_FRAME_QUAD:
switch (frame_type) {
...
case MOTOR_FRAME_TYPE_X: {
_frame_type_string = "X";
static const AP_MotorsMatrix::MotorDef motors[] {
{
45, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 1 },
{
-135, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 3 },
{
-45, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 4 },
{
135, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 2 },
};
add_motors(motors, ARRAY_SIZE(motors));
break;
}
...
}
}
// normalise factors to magnitude 0.5
normalise_rpy_factors();
}
ArduCopter这边给出了14种配置结构,定义于AP_Motors_Class.h中的枚举类型里,如下所示
\libraries\AP_Motors\AP_Motors_Class.h
class AP_Motors {
public:
enum motor_frame_class {
MOTOR_FRAME_UNDEFINED = 0,
MOTOR_FRAME_QUAD = 1,
MOTOR_FRAME_HEXA = 2,
MOTOR_FRAME_OCTA = 3,
MOTOR_FRAME_OCTAQUAD = 4,
MOTOR_FRAME_Y6 = 5,
MOTOR_FRAME_HELI = 6,
MOTOR_FRAME_TRI = 7,
MOTOR_FRAME_SINGLE = 8,
MOTOR_FRAME_COAX = 9,
MOTOR_FRAME_TAILSITTER = 10,
MOTOR_FRAME_HELI_DUAL = 11,
MOTOR_FRAME_DODECAHEXA = 12,
MOTOR_FRAME_HELI_QUAD = 13,
MOTOR_FRAME_DECA = 14,
MOTOR_FRAME_SCRIPTING_MATRIX = 15,
MOTOR_FRAME_6DOF_SCRIPTING = 16,
MOTOR_FRAME_DYNAMIC_SCRIPTING_MATRIX = 17,
};
...
}
根据不同的机身结构,frame_type定义了不同的机型类别。
\libraries\AP_Motors\AP_Motors_Class.h
class AP_Motors {
public:
...
enum motor_frame_type {
MOTOR_FRAME_TYPE_PLUS = 0,
MOTOR_FRAME_TYPE_X = 1,
MOTOR_FRAME_TYPE_V = 2,
MOTOR_FRAME_TYPE_H = 3,
MOTOR_FRAME_TYPE_VTAIL = 4,
MOTOR_FRAME_TYPE_ATAIL = 5,
MOTOR_FRAME_TYPE_PLUSREV = 6, // plus with reversed motor direction
MOTOR_FRAME_TYPE_Y6B = 10,
MOTOR_FRAME_TYPE_Y6F = 11, // for FireFlyY6
MOTOR_FRAME_TYPE_BF_X = 12, // X frame, betaflight ordering
MOTOR_FRAME_TYPE_DJI_X = 13, // X frame, DJI ordering
MOTOR_FRAME_TYPE_CW_X = 14, // X frame, clockwise ordering
MOTOR_FRAME_TYPE_I = 15, // (sideways H) octo only
MOTOR_FRAME_TYPE_NYT_PLUS = 16, // plus frame, no differential torque for yaw
MOTOR_FRAME_TYPE_NYT_X = 17, // X fr 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2224
2224

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









