






 本文指导如何修改imu内参和lidar与imu的外参,以及LIO-SAM的配置参数,以解决定位过程中出现的问题。作者分享了实际操作步骤和调整外参对结果影响的经验。
本文指导如何修改imu内参和lidar与imu的外参,以及LIO-SAM的配置参数,以解决定位过程中出现的问题。作者分享了实际操作步骤和调整外参对结果影响的经验。
1、修改imu内参和外参:
打开config文件夹下params.yaml文件,(最好是copy一份源文件保存下来)。
①imu内参:
这是我标定好的imu参数
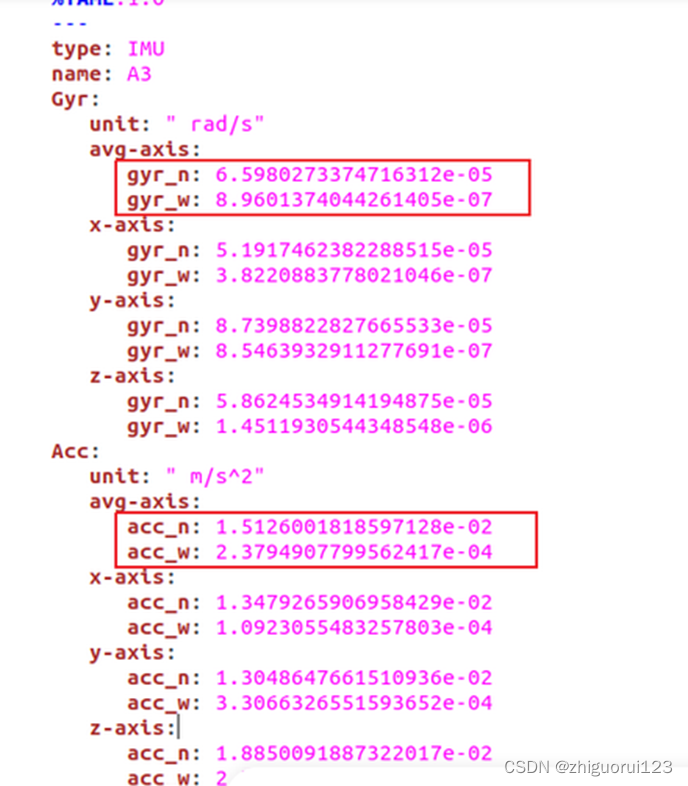
按照下面对应的关系在params.yaml文件中修改参数:

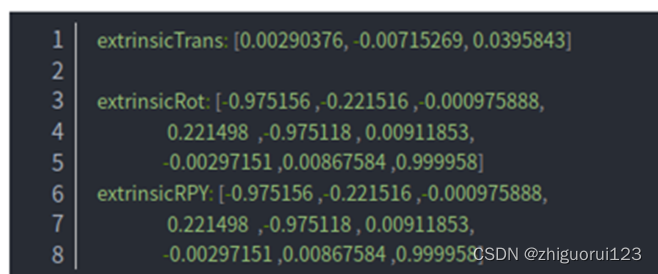
②lidar和imu的外参:
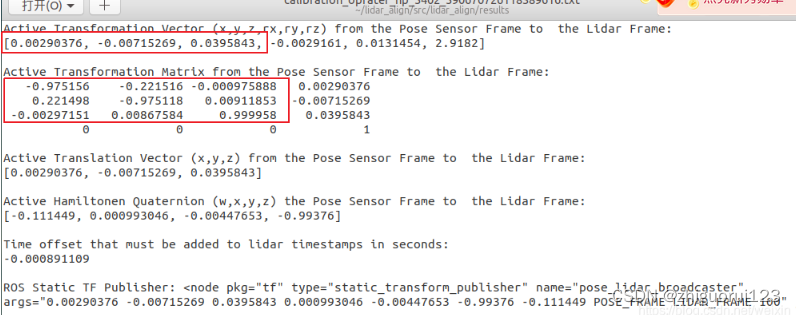 在params.yaml文件里修改为:
在params.yaml文件里修改为:
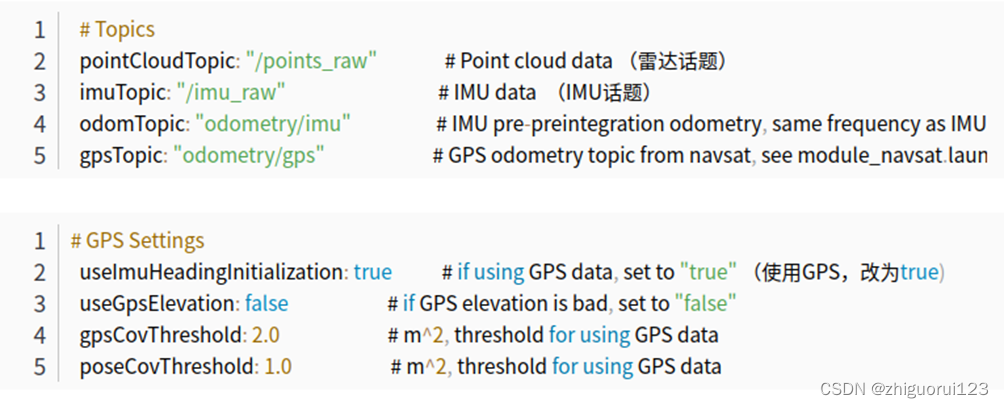
2、修改LIO-SAM配置参数
2.1 params.yaml
打开config文件下的params.yaml,修改雷达和imu话题
然后就可以跑啦(*╹▽╹*)
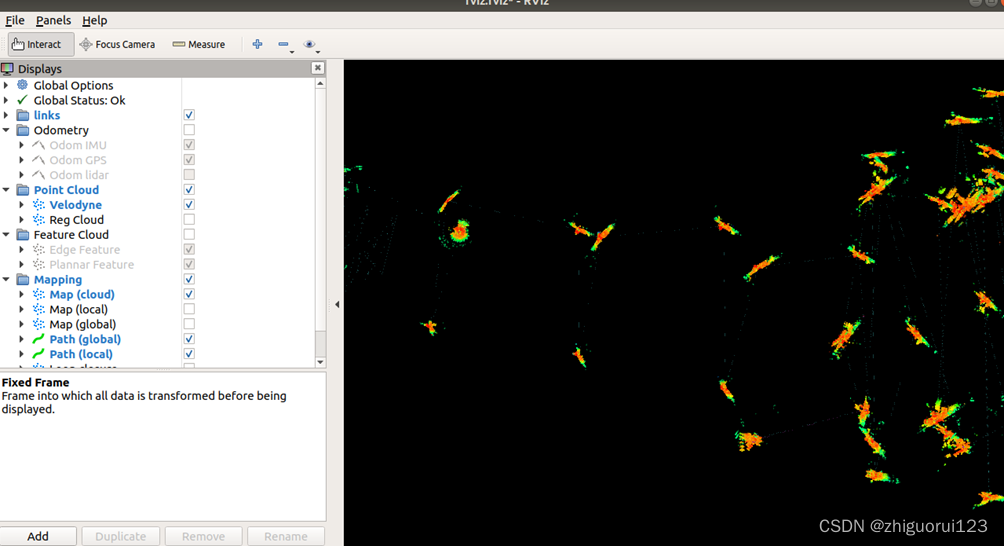
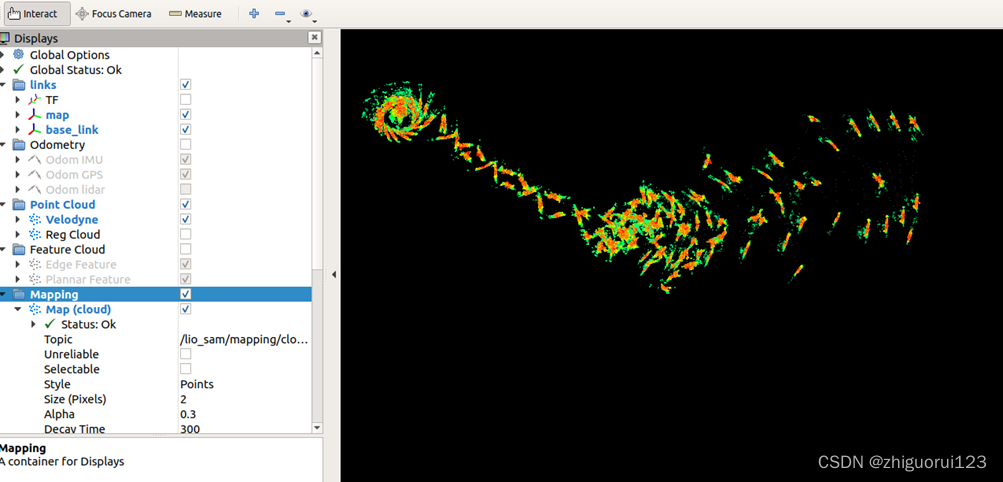
但是我跑的时候也出现了问题,如下面几张图所示,有的跑出来就像大鸡腿一样。查了许多文档,说的不是很清楚,最后我多测试了几组外参,运行结果就不飘了。
















 727
727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









