







前言:看了一篇介绍机器人导航的文章,初步有一些了解,于是记录下来
现在很多餐厅,都用上了送餐机器人,机器人能端着盘子蹭蹭蹭地自动上菜。
不过仔细看,这不是巡线小车吗?只要事先铺设好路线,它就会跟着指引线走。
但很多情况下,地上都没有指引线(比如室外),那要如何找路呢?目前有两种方式。
第一种:找参照物,规划好机器人的运动线路。
那么,问题又来了,如果机器人遇到障碍物,或者被人为挪动了,起点就会错乱。我们把“遇障碍”叫动态路径规划,“被挪动”叫机器人绑架问题。
我们就要用另一种方法——感知式系统。它会先得到地图(事先得到或者自己建立),然后对地图解析推理,得到最佳的路。就像手机导航,从地图中找路。
它能做更复杂的操作,比如自主定位、自主导航。像智能扫地机器人、无人车等就是用了感应式系统。
宾夕法尼亚大学的Vijay Kumar教授在Coursera公开课上讲过,任何系统的导航,都由四部分组成:
状态估计(State Estimation):实现机器人的定位和感知;
建图(Mapping):建立所在环境的地图(如果事先没有给地图的话);
规划(Planning):制定能走的路;
控制(Control):控制机器人按照导航走。
定位(状态估计)和建图
这两部分经常被一起提起,他们就是大名鼎鼎的SLAM(Simultaneous Localization And Mapping,同步建图与定位)。
我们用一个最简单的一维定位问题,来看机器人如何定位。

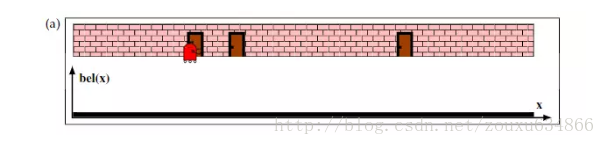
在这个问题里,三个门的相对位置是已知的。机器人一开始不知道自己在哪,所以黑线(表示概率)没有起伏。(a图)
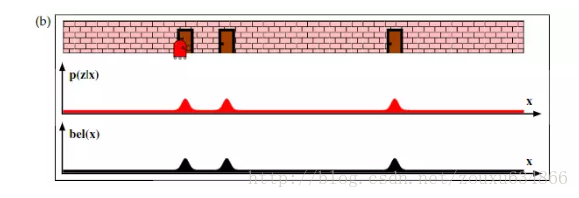
前进时,机器人发现了一扇门,它立马确定自己在一扇门旁边,但不知道哪一扇。所以机器人在三扇门位置的概率都升高了。(b图)
我们继续走,发现了另一扇门。根据两扇门的相对位置(地图提供),机器人确定自己在第二扇门的旁边。(d图)
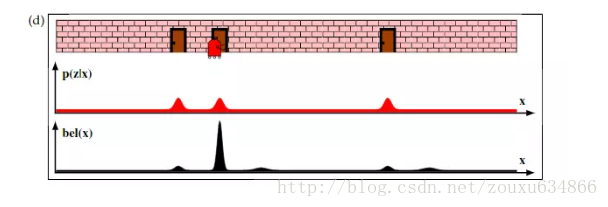
现在,机器人基本确定了自己的位置,完成了定位。无人车在3D地图中,也是靠这种方法定位。
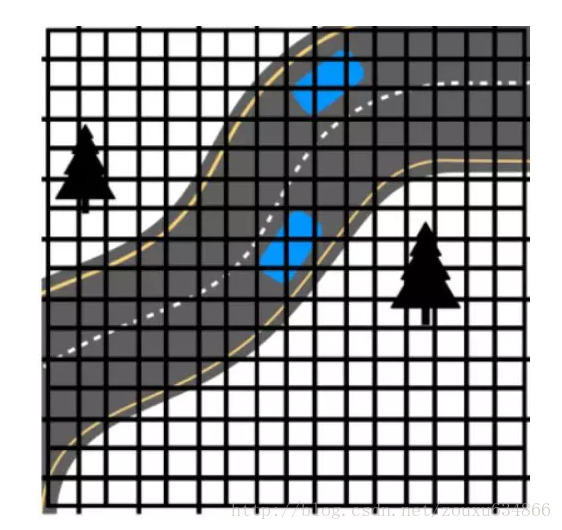
那万一机器人走进沟里、爬树上了怎么办?我们也有对策。平面中,常用二维栅格地图,地图会被切成一个个小格。
我们可以用“0”和“1”来表示这个格子是否可以通过,最终得到了相应的地图。
格子越小,地图就越精确,不过占用的存储空间也就越大。
规划
现在有了定位和地图,可以开始导航了。就像手机导航一样,我们需要知道起点和终点,然后找到一条路。
关键就在“路”的选择上,需要考虑很多因素。
举个栗子,我在西安上学,打算自驾去拉萨看布达拉宫。小学学过,两点之间直线最短,我就沿着直线跑。跑着跑着发现不对头,这路都是土路、山路、峡谷,耗油量反而更高了!于是规划出另一条路,尽量绕开山坡,同时保证路径最短。
机器人的运动同理,需要考虑全局规划(路径短)和局部规划(绕障碍),最后得到最佳的路径。
经典的规划算法有A*、D*、RRT、RPM等,其中D*和RRT算法比较有代表性。
控制
控制就是让机器人动起来,并且动得很精准,主要包括对底盘的运动控制和电机的PID控制。















 572
572

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









