






一、准备数据集
(一)Colmap给出了几个官方数据集作为参考,详见官方文档中Datasets部分,我下载了里面的South Building。
打开这个数据集中的images可以看到其中的照片信息。
(二) 准备个人数据集
在制作个人图片数据集时,要注意拍摄图片要具有良好的纹理,尽量避免拍摄反光物体;
拍摄物所处的环境光线要尽量一致;
所拍摄照片要足够重叠,在不同角度拍摄的物体要有较高的重叠度,要注意连续性,这样可以减少图像重建的时间;
从不同角度对物体进行拍摄,比如正面一圈,上面一圈;
注意照片的分辨率,如果拿手机拍摄的照片,往往照片的分辨率会很高,重建的时候时间往往会长,所以可以适时减小图片的分辨率,我是在手机拍摄界面中直接进行设置的;
拍摄完照片后,将其放到一个文件夹里,如图,里面有135张收集到的照片。
二、进行三维重建
1、点击Colmap.bat,进入界面,打开的cmd界面不要关闭 。
2、快速开始,点击Reconstruction-Automatic reconstruction
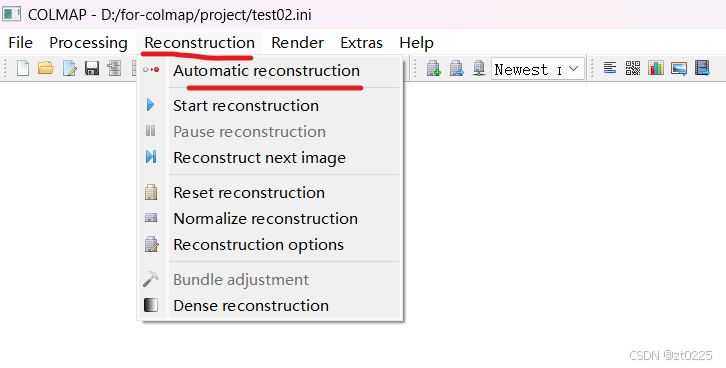
点击完后,会出现如下界面:
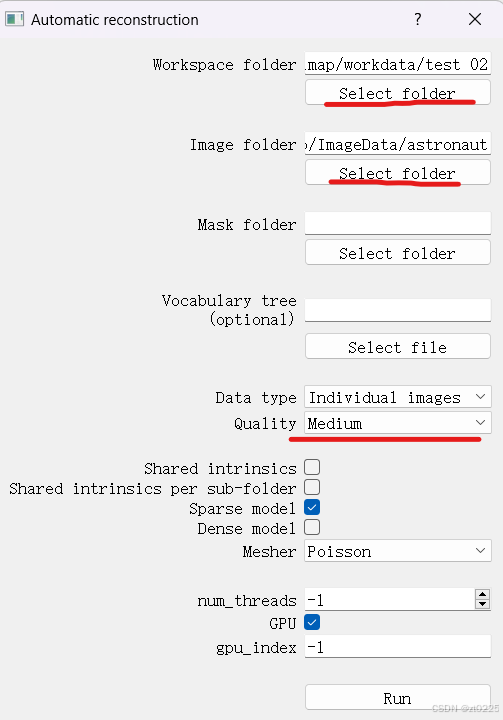
这其中需要注意图片的路径和模型要保存的路径,Workspace folder为模型保存路径,Image folder为图片存放路径,Quality 这里根据需求选择Medium,选择High的话运行时间会更长,设置好这些号点击Run。
点击完后重建就开始了,命令行里会依次自动出现以下信息:
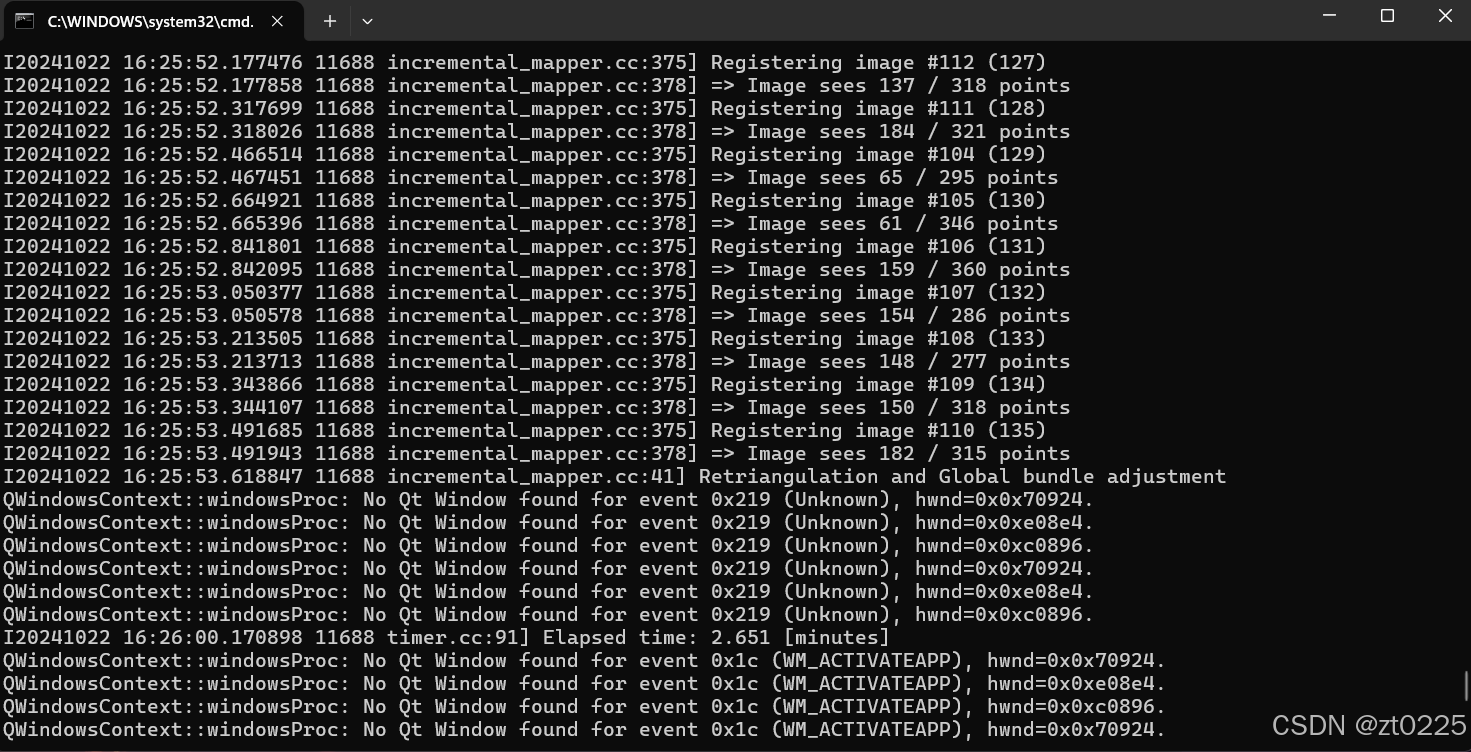
其实这就是一般的SFM重建过程,可以分开执行,由于这里使用了 Automatic reconstruction所以是自动执行的,这个过程会执行一段时间。
3、重建完成后,这里提示导入重建的稀疏模型可以进行可视化,这些模型还被导出到工作空间中的 sparse 下的子文件夹中,点击ok即可。
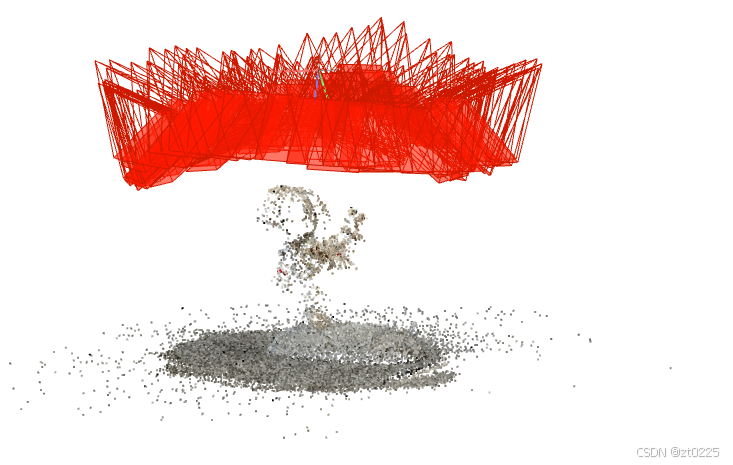
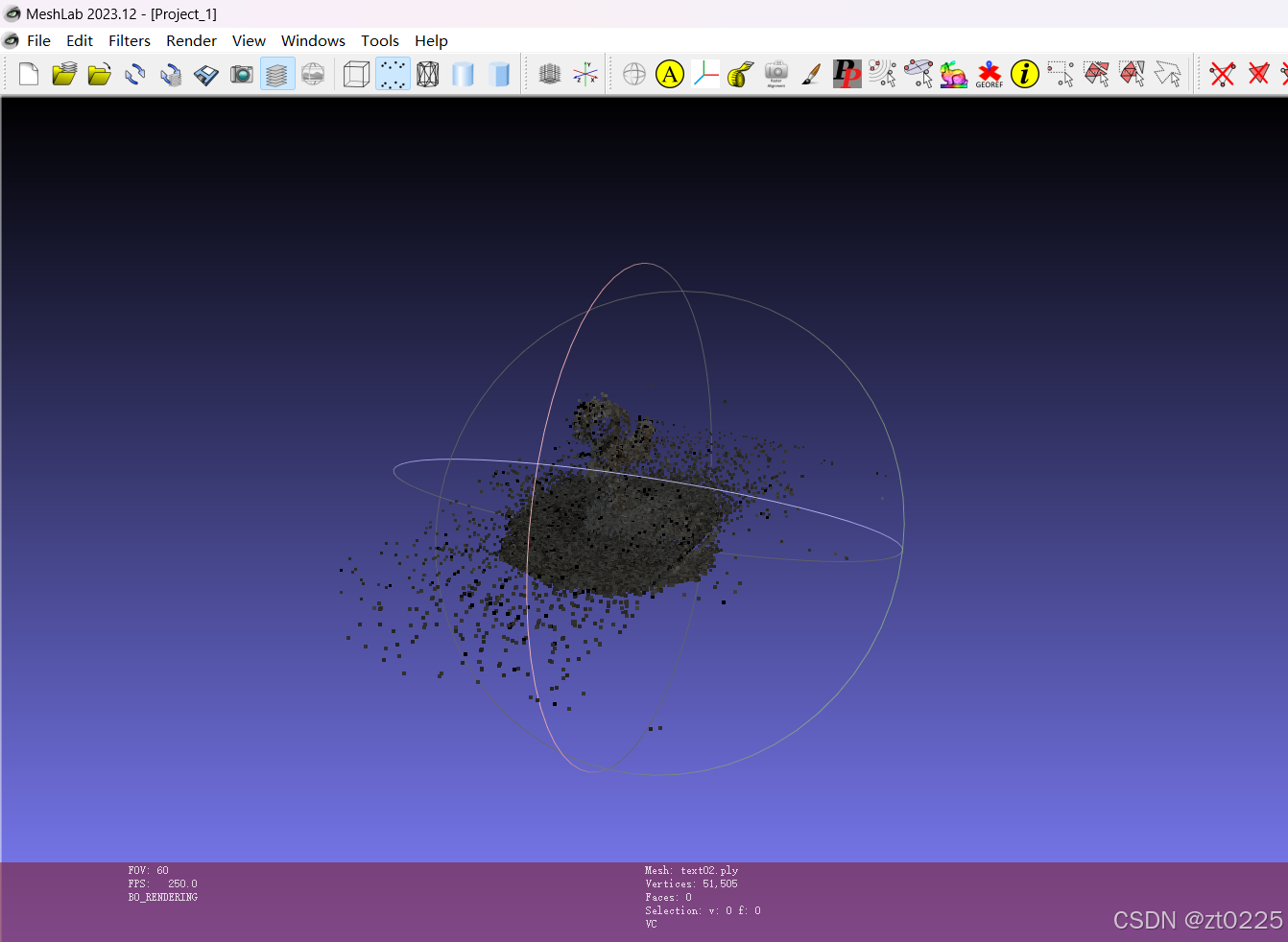
三、稀疏点云
接下来可以在界面中看到稀疏点云的生成
保存模型:依次点击File > Export model,选择要保存的文件夹即可
保存点云:依次点击File > Export model as,在弹出的菜单中选择.ply格式,并取个文件名
四、可视化
保存完后,下载MeshLab对其进行可视化,MeshLab直接在官网上按照步骤下载即可,可将.ply文件直接拖拽上去便可直接查看
五、遇到的问题
由于我的电脑有N卡,所以刚开始下载的是cuda版本的,但后面cuda没有配置成功
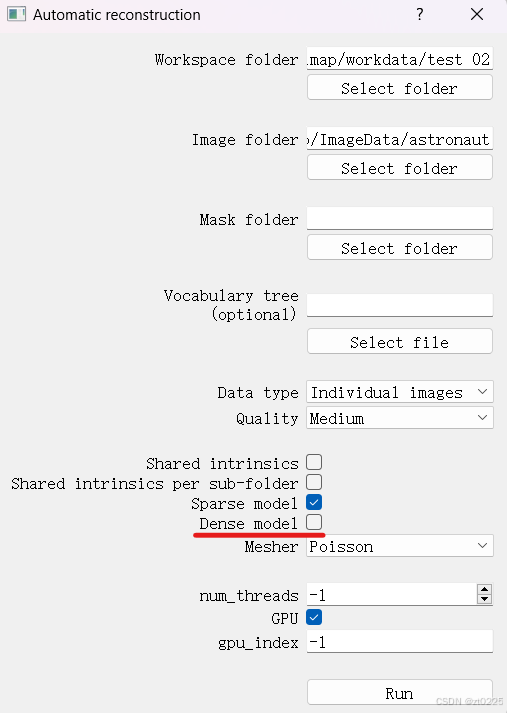
所以我先没有勾选Dense model(稠密重建),但即使这样点击Run的时候程序会一直闪退,根本无法运行,后面我又下载了no cuda版本的才得以运行成功,但也只能看稀疏重建。
后续我会解决一下cuda的问题,以便进行稠密重建。

















 501
501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









