







 本文对比了Microsoft Kinect、Intel RealSense、Leap Motion Controller、Orbbec Astra、图漾等深度相机,详述了各自的技术特点、应用场景及优缺点。Kinect V2具有大视场角和高质量深度图,但限制多;RealSense注重脸部和手部跟踪,R200不支持手势和骨架跟踪;Leap Motion擅长手指跟踪,不提供IR/RGB数据;Orbbec Astra适合远距离室内应用;图漾科技的RGB-D相机适用于远距离场景。
本文对比了Microsoft Kinect、Intel RealSense、Leap Motion Controller、Orbbec Astra、图漾等深度相机,详述了各自的技术特点、应用场景及优缺点。Kinect V2具有大视场角和高质量深度图,但限制多;RealSense注重脸部和手部跟踪,R200不支持手势和骨架跟踪;Leap Motion擅长手指跟踪,不提供IR/RGB数据;Orbbec Astra适合远距离室内应用;图漾科技的RGB-D相机适用于远距离场景。
本文首发于微信公众号:计算机视觉life。

本文的深度相机制造商涉及:Microsoft、Intel、Leap Motion、Orbbec、图漾、Occipital Structure、Stereolabs 、DUO。 文末附深度相机详细对比清单。
Microsoft Kinect
微软推出了两款Kinect,Kinect一代(Kinect v1)是基于结构光原理的深度相机,Kinect二代(Kinect v2),是基于TOF原理的深度相机。如下所示:

Kinect v1,v2的性能参数对比如下:
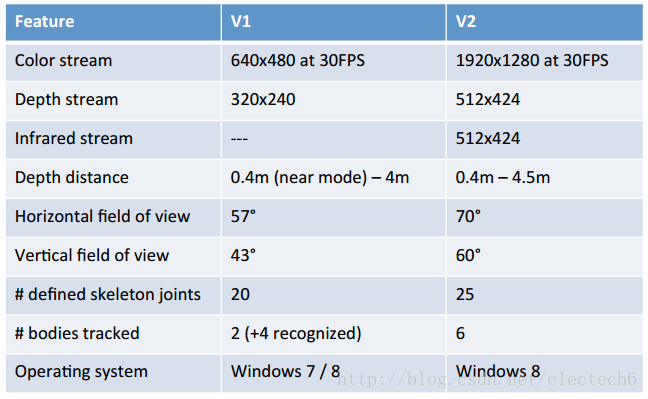
这里主要介绍一下Kinect V2。Kinect V2具有较大的红外传感器尺寸,并且(相对于其他深度相机)具有较宽阔的视场角,生成的深度图质量比较高。此外,Kinect V2的SDK非常给力,SDK中提供了同时最多进行六个人的骨架追踪、基本的手势操作和脸部跟踪,支持 Cinder 和 Open Frameworks,并且具有内置的Unity 3D插件。但是,Kinect V2也有一些缺点,比如一台电脑只能连接一个Kinect v2设备,只能在Windows8及以上的操作系统上使用等。
Intel RealSense
Intel RealSense系列深度相机定位不同于Microsoft的 Kinect 系列,Kinect更注重较远距离的人体骨架跟踪,而RealSense 更注重近距离的脸部、手部跟踪,主要应用场景是笔记本电脑、Pad、虚拟现实设备。
Intel RealSense系列有很多选择,比如较早的RealSense F200、RealSense R200,较新的RealSense D400系列、RealSense ZR300、RealSense SR300等。下面以RealSense R200为例介绍一下。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1227
1227

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









