







 这篇博客详述了在Ubuntu14.04上安装ROS Indigo的过程,包括配置Ubuntu软件源,设置sources.list,安装ROS,初始化rosdep,环境设置,安装rosinstall,并测试安装成功。此外,还介绍了如何管理ROS环境及创建ROS工作空间,特别是使用catkin工作空间和编译工具catkin_make。
这篇博客详述了在Ubuntu14.04上安装ROS Indigo的过程,包括配置Ubuntu软件源,设置sources.list,安装ROS,初始化rosdep,环境设置,安装rosinstall,并测试安装成功。此外,还介绍了如何管理ROS环境及创建ROS工作空间,特别是使用catkin工作空间和编译工具catkin_make。
1. 安装ROS
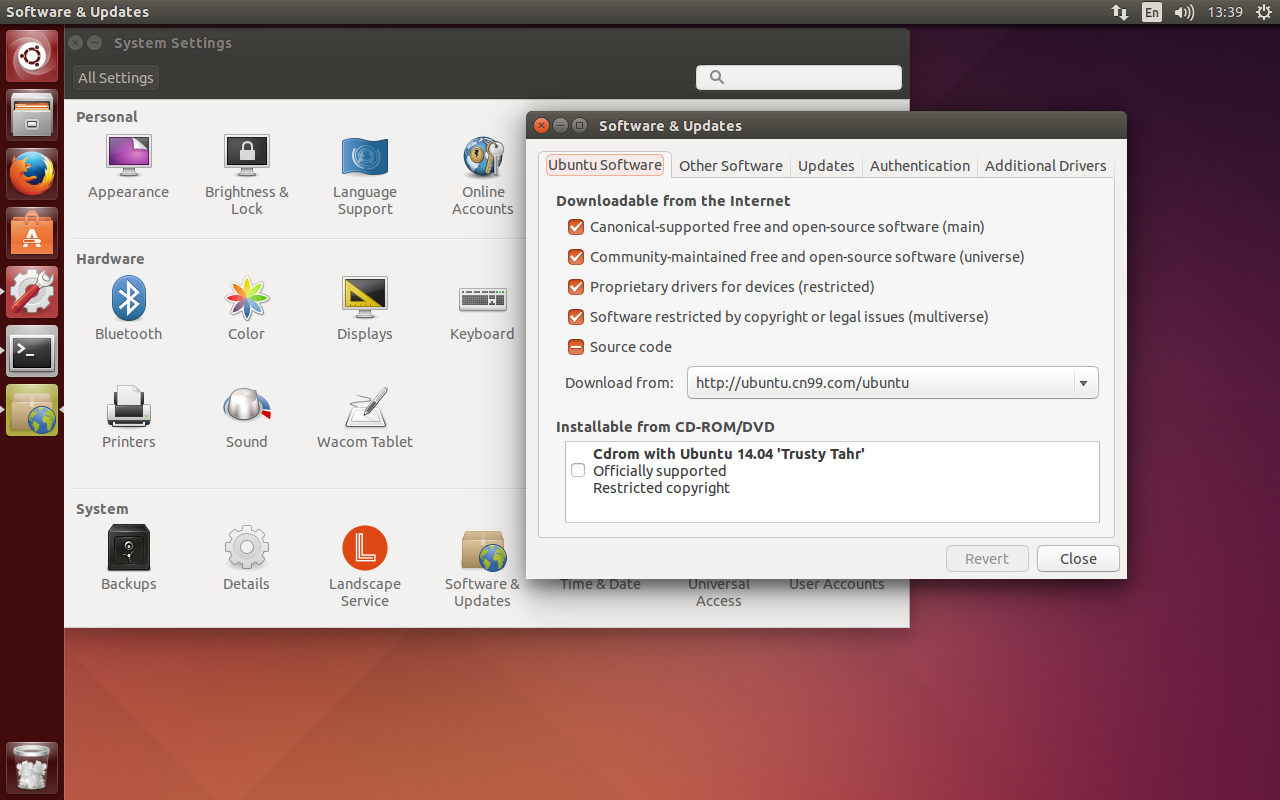
1.1 配置Ubuntu 软件源
在System Settings中将Software&Updates配置成:
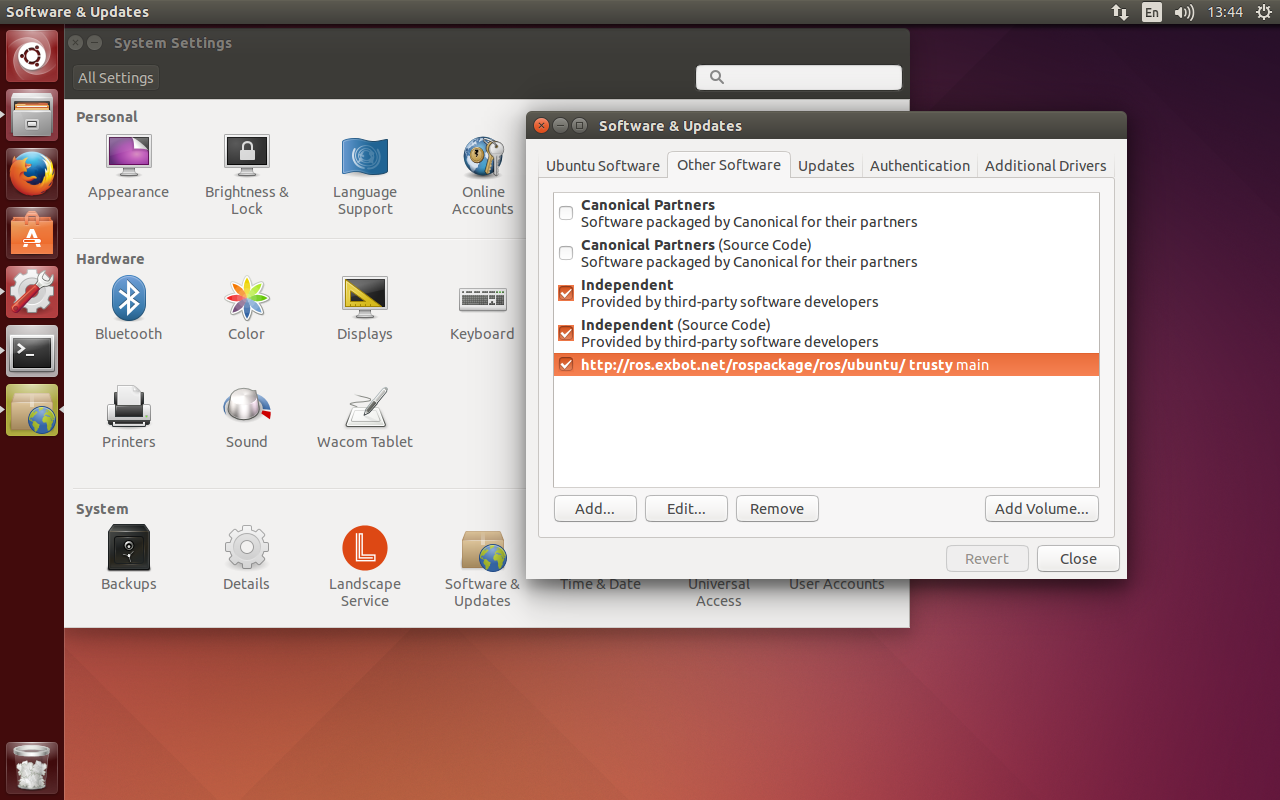
1.2 设置软件源 sources.list
终端命令如下:
sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospackage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'设置成功之后:
![]()
1.3 设置密钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA1161.4 安装
首先更新软件包
在ROS中有许多函数库和工具,推荐完全安装
sudo apt-get updatesudo apt-get install ros-indigo-desktop-full1.5 初始化rosdep
rosdep不仅能使你更容易安装系统依赖项,而且在ROS中运行一些主要部件也需要rosdep.
sudo rosdep init
rosdep update1.6 环境设置
添加ROS的环境变量,这样,当你打开你新的shell时,你的bash会话中会自动添加环境变量。
$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
# 使环境变量设置立即生效
$ source ~/.bashrc1.7 安装 rosinstall
rosinstall 是ROS中使用非常频繁的命令工具sudo apt-get install python-rosinstallsudo apt-get install python-rosinstall-generator python-wstool build-essential1.8 安装成功测试
通过移动小乌龟的例子来测试ROS是否安装成功
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4675
4675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









