






机械臂DH参数(Denavit-Hartenberg参数)是一种常用的参数化方法,用于描述机械臂的运动学关系,这里介绍常用的Modified DH 参数,它包含了如下四个参数:
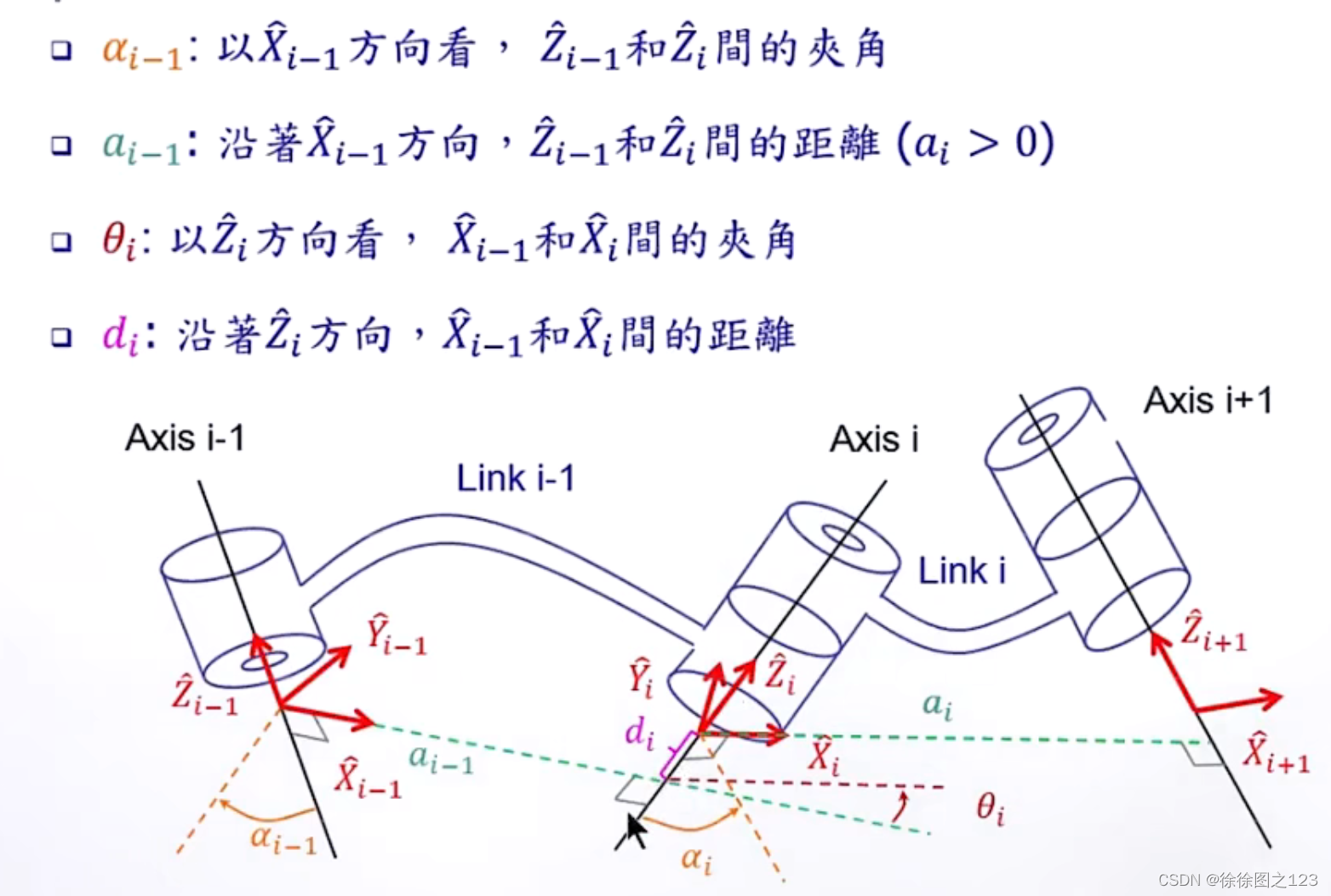
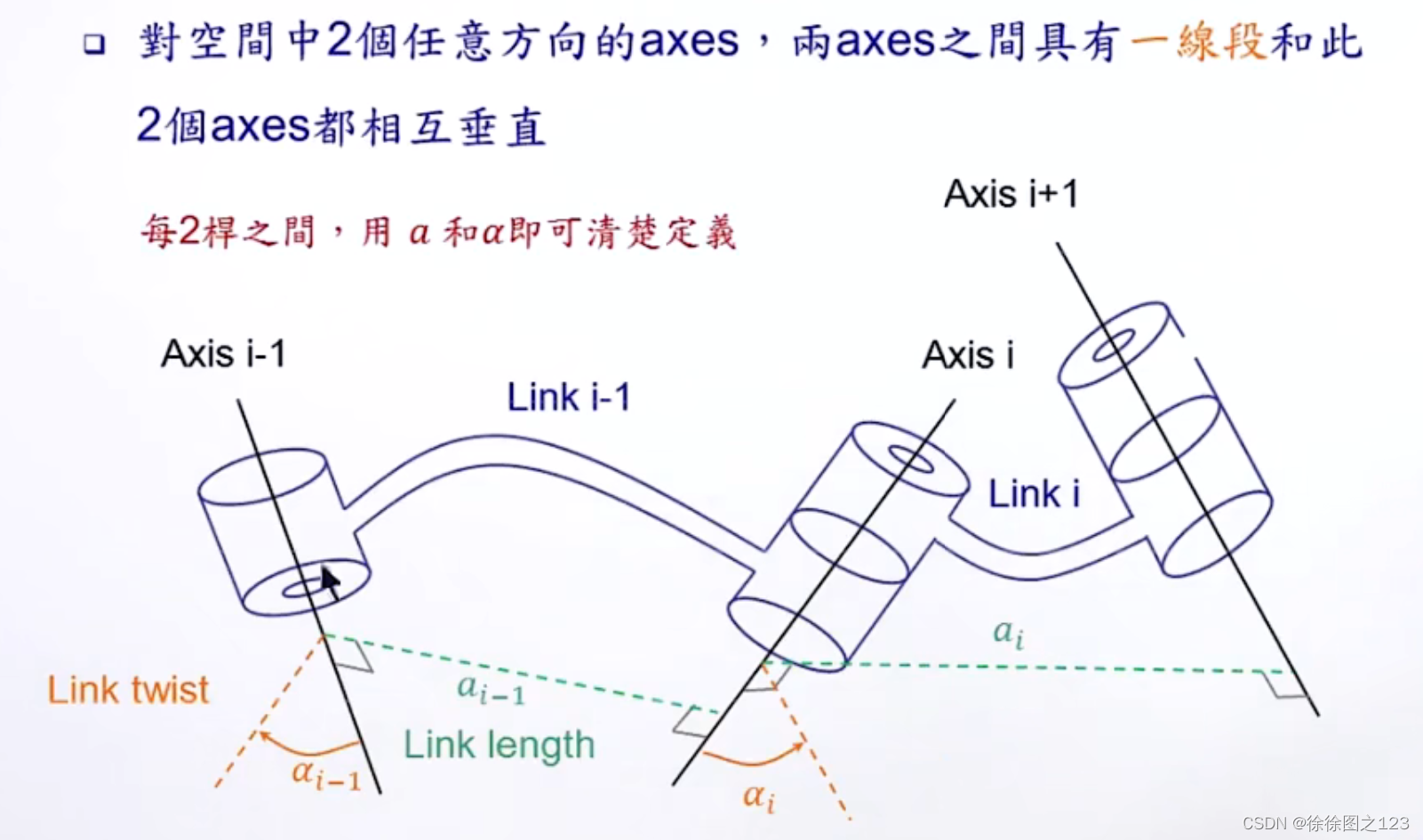
其中描述机械臂当前旋转轴与下一个旋转轴之间的角度,
描述旋转轴与下一个旋转轴之间的距离
描述当前轴与上一个旋转轴间的旋转角度,也是DH参数中唯一的变量
由DH参数可知道机械臂相邻杆件之间的相对姿态
下面是型号为PUMA560的六自由度机械臂和对应的DH参数
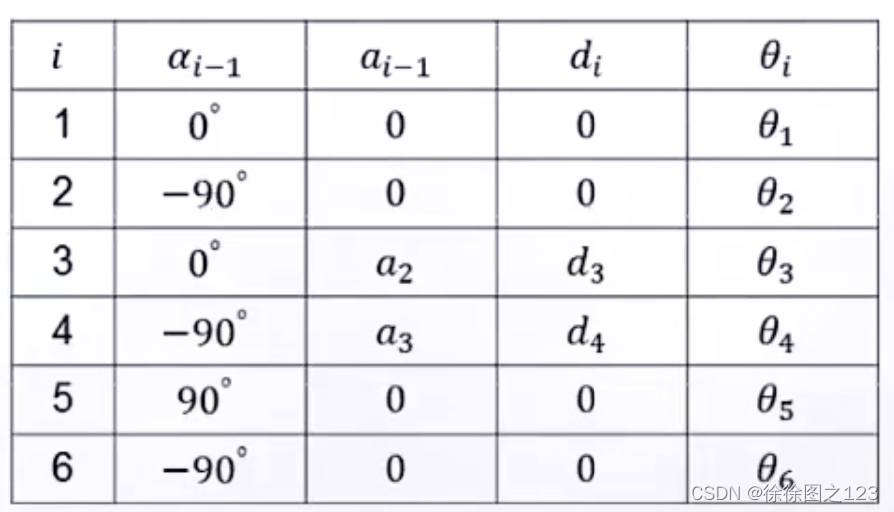
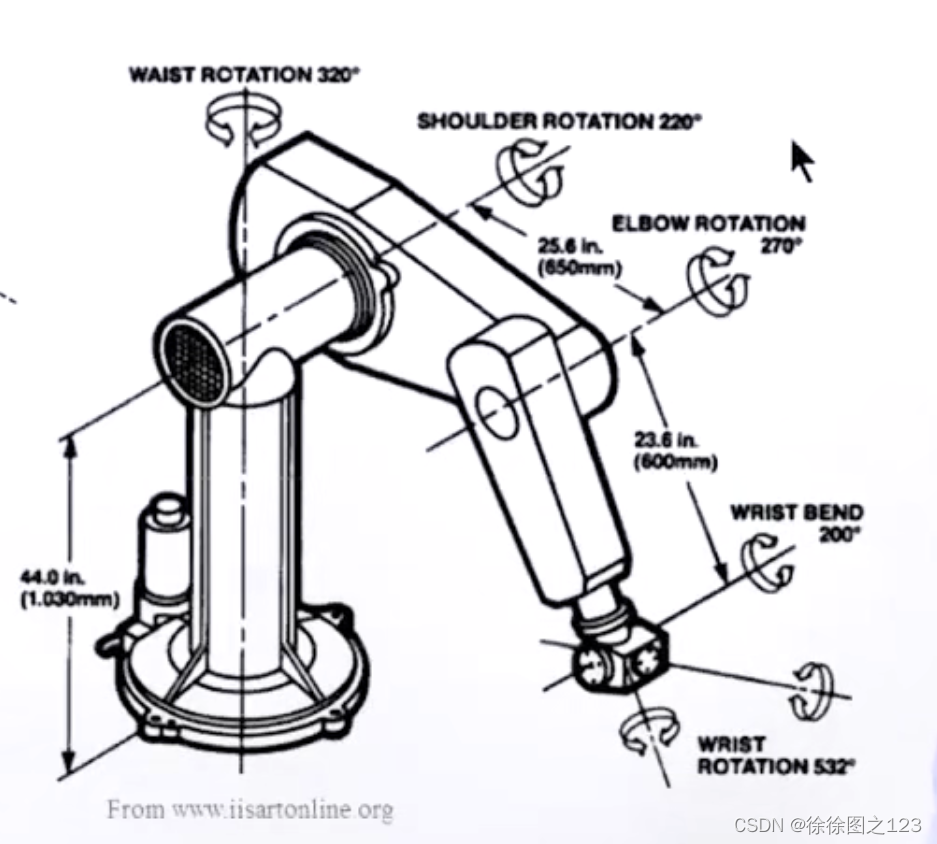
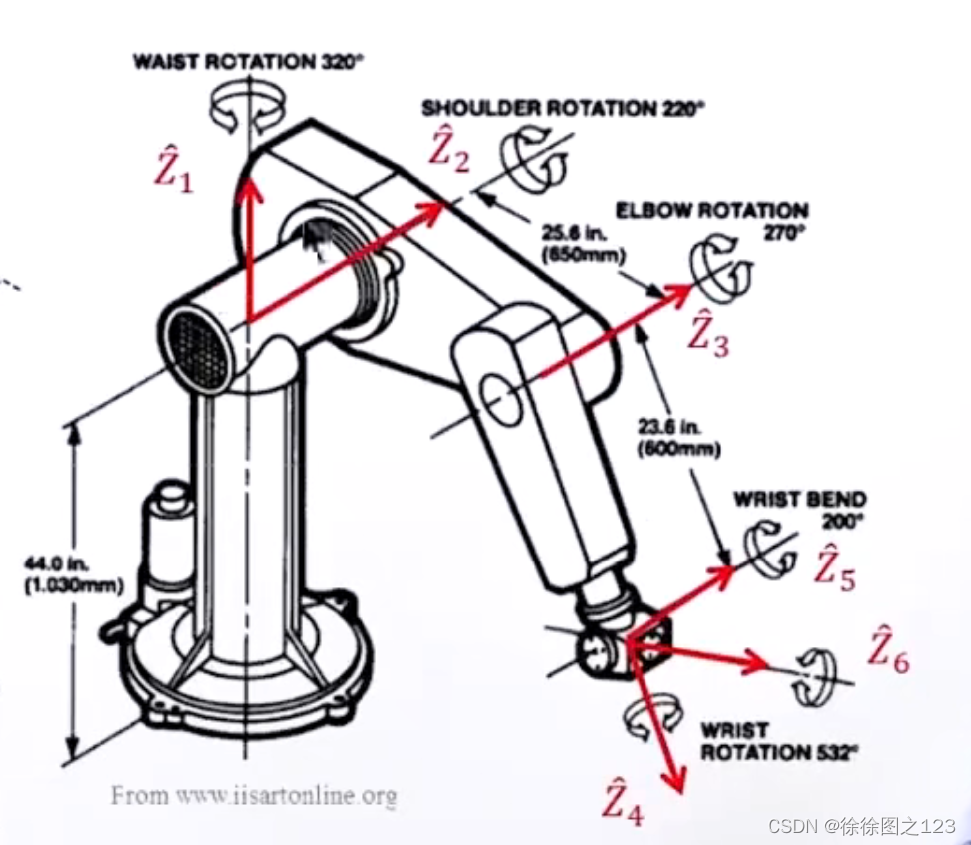
由DH参数建立各轴间的坐标系,首先参考各轴旋转轴建立坐标系的z轴,如下:
接下来标出X轴方向,其中第4、5、6轴同轴,故坐标轴原点重合
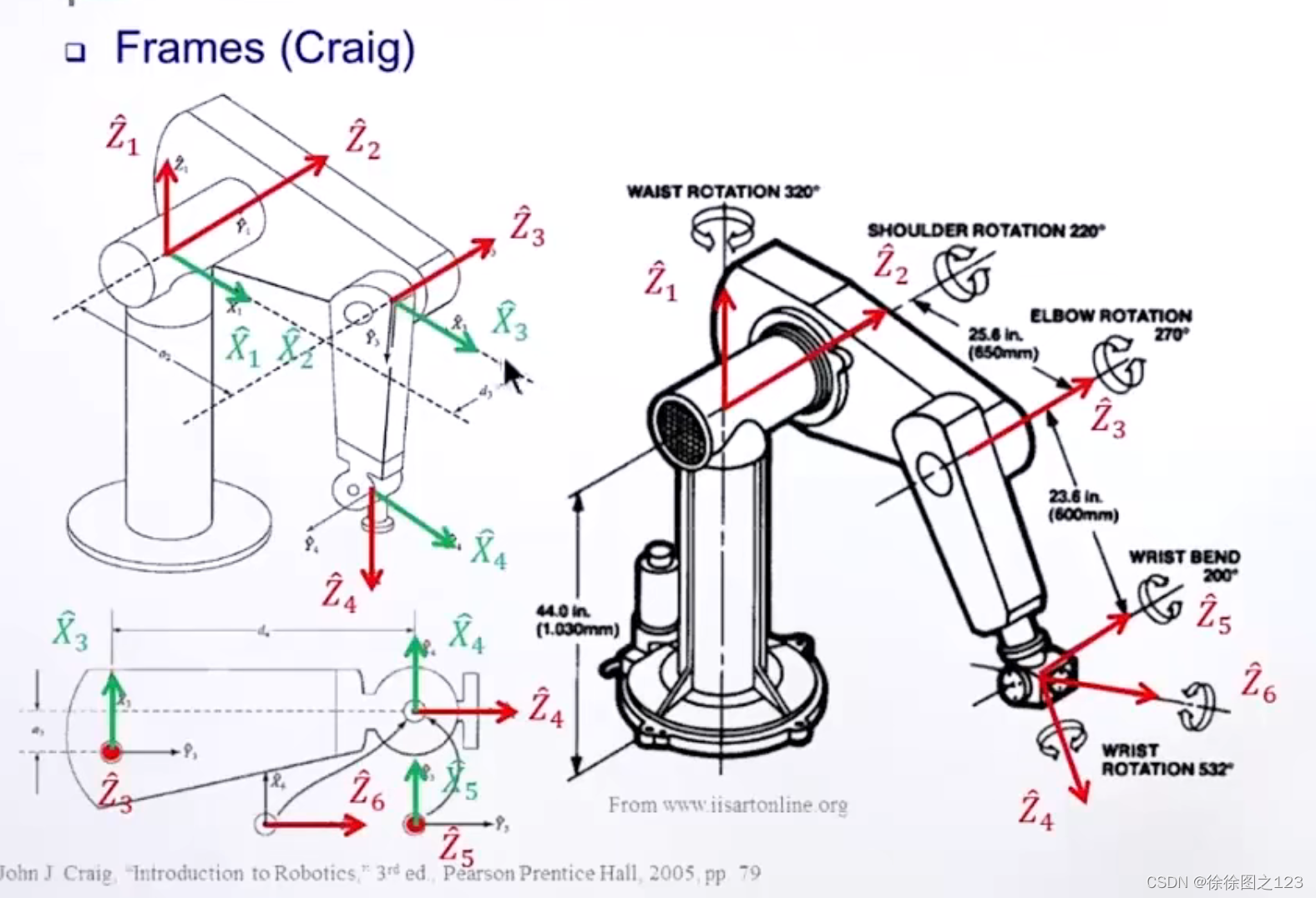
最后根据右手定则,已知X、Z轴标出Y轴位置
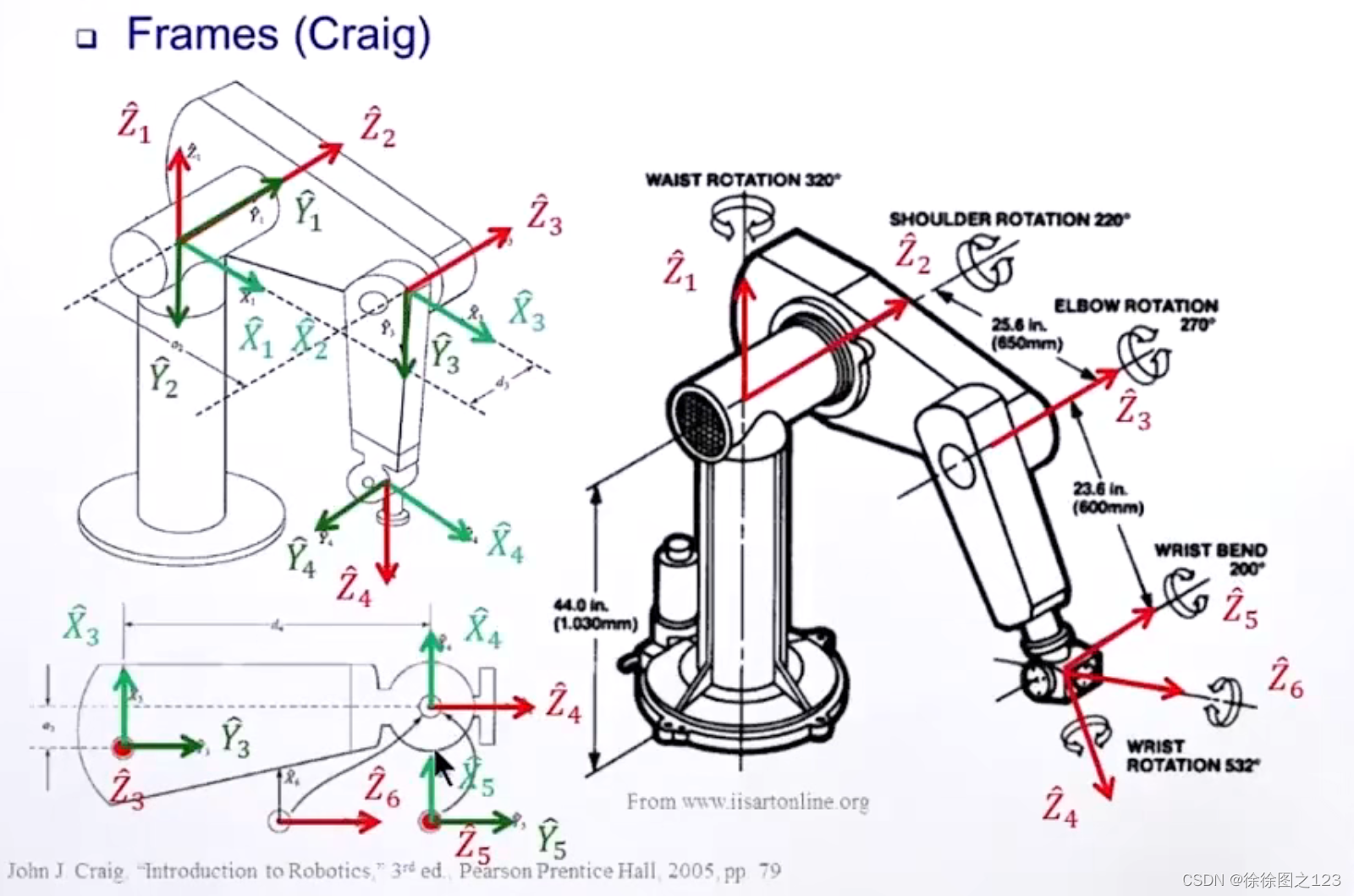
最后检查一下各轴坐标是否符合DH参数描述,这里图纸中标出的坐标轴注意下标是从0开始,和表格对应。
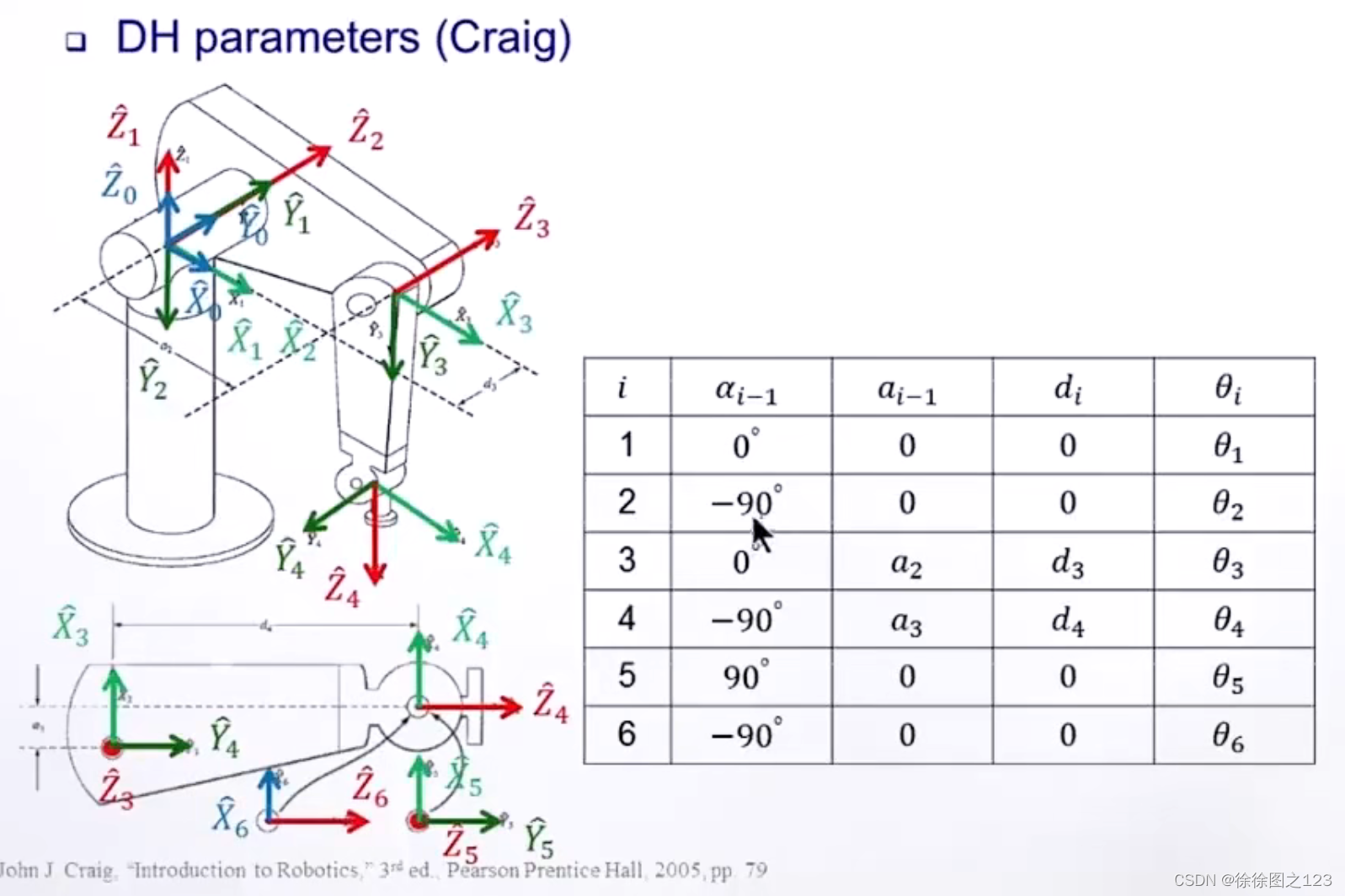
由可看出第1、2和第3、4轴的坐标系的Z轴平行(DH参数表格0°),检查图纸中的坐标系位姿正确对应。由
得出第3、4轴和第4、5轴 Z轴间错开距离,和图纸对应。同理
和 d参数和图纸中的坐标轴位姿对应(角度的正负关系:逆时针为正,顺时针为负)。
至此完成由DH参数建立对应的各轴坐标系位姿。

















 2398
2398

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









