






我也是从五一零开始学习搞的小车,走了很多弯路,跟着我这个来肯定能做一个出来,后续可开发性很高,成品你只需要发送一个(1,1)就能直接到达目标位置
目录
我也是从五一零开始学习搞的小车,走了很多弯路,跟着我这个来肯定能做一个出来,后续可开发性很高,成品你只需要发送一个(1,1)就能直接到达目标位置
硬件准备:
首先准备一个树莓派4B(有18.04镜像的,没有可以参考我前面发的树莓派考镜像)
一个L298N电机驱动模块
一个小车底盘(我这里用的是三轮,前轮是滚珠式,后轮是两个减速编码电机)
一个二维激光雷达(我这里用的是镭神N10,其他二维雷达也可以,只不过后续下载的包不一样)
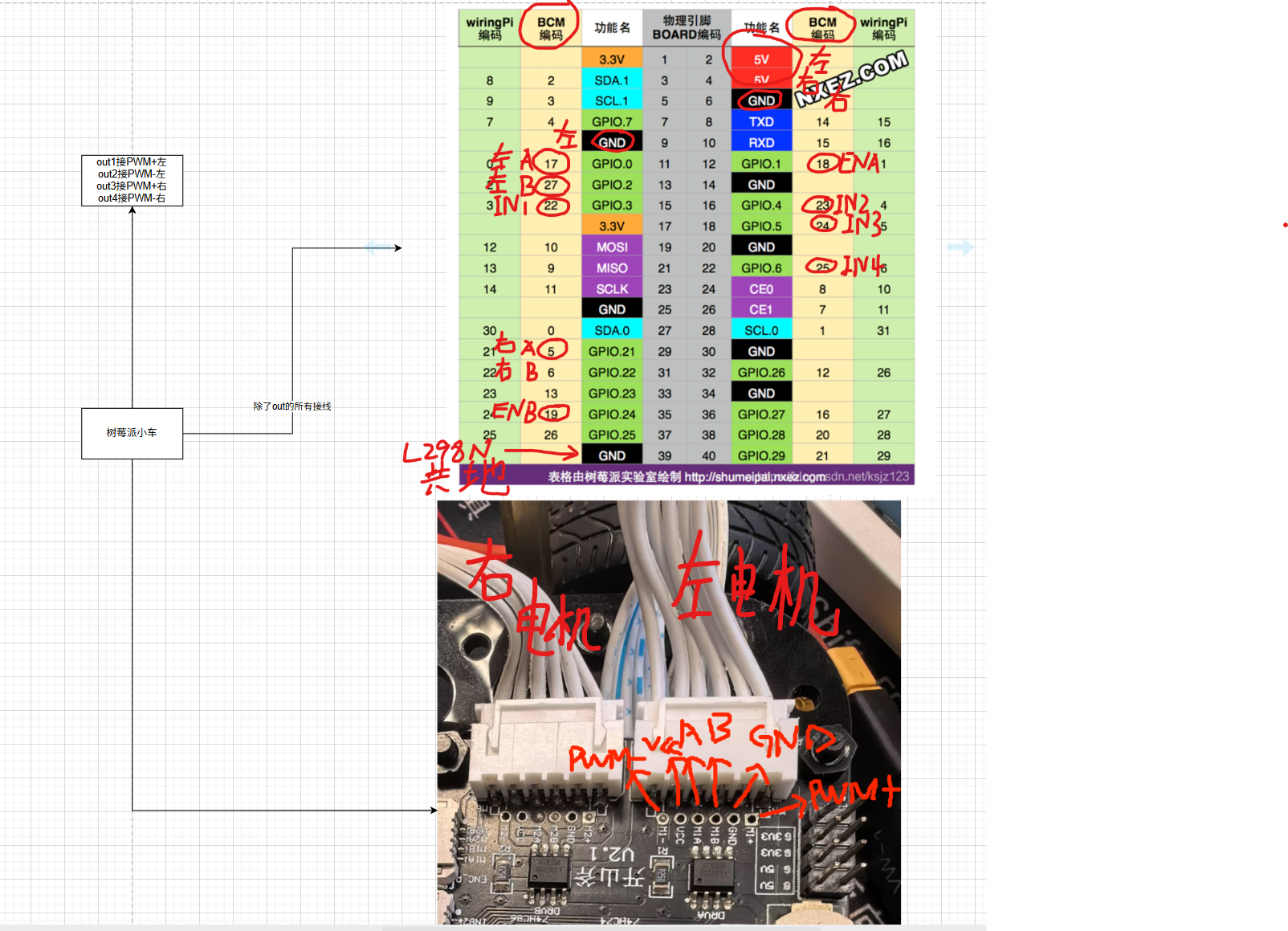
硬件接线
我用的是drawio这个软件,接线图上传百度网盘了,百度网盘下载之后必须用drawio软件打开。或者网页版也可以打开,把下载的接线图文件拖到drawio这个网页也可以
通过网盘分享的文件:小车
链接: https://pan.baidu.com/s/1xlr8O69pWxlYu5DjvI4j3Q 提取码: haha
--来自百度网盘超级会员v3的分享
这个接线图和网盘上的差不多,只不过标记了左右电机,如果看不清楚就百度网盘下载
电机测试:
接线也搞好了之后就可以测试了,我这里用的是python,因为python不用编译,代码写完就能直接测试,所以比较方便,后续会改成C++,下面这个代码可以直接运行,他就是检测电机接线有没有问题的,电机转了代表硬件接线没问题了,编码器有值代表正常。如果运行没反应那就是,接线有问题,最重要的接线就是树莓派左下角那个GND一定要和L298N共地(用一个3S电池给L298N供电,树莓派那个GND也要接在L298N的供电负极)
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
import time
# ==== 引脚定义 ====
# 左电机控制引脚
IN1 = 22
IN2 = 23
ENA = 18 # PWM
# 右电机控制引脚
IN3 = 24
IN4 = 25
ENB = 19 # PWM
# 编码器引脚
ENCODER_LEFT = 17
ENCODER_RIGHT = 5
# 编码器计数
encoder_left_count = 0
encoder_right_count = 0
# ==== 编码器中断回调函数 ====
def encoder_left_callback(channel):
global encoder_left_count
encoder_left_count += 1
def encoder_right_callback(channel):
global encoder_right_count
encoder_right_count += 1
# ==== GPIO 初始化 ====
def setup():
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
# 电机控制引脚设为输出
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(ENA, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
GPIO.setup(ENB, GPIO.OUT)
# 编码器引脚设为输入
GPIO.setup(ENCODER_LEFT, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(ENCODER_RIGHT, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# 编码器中断监听
GPIO.add_event_detect(ENCODER_LEFT, GPIO.RISING, callback=encoder_left_callback)
GPIO.add_event_detect(ENCODER_RIGHT, GPIO.RISING, callback=encoder_right_callback)
# 初始化 PWM(100Hz)
pwm_left = GPIO.PWM(ENA, 100)
pwm_right = GPIO.PWM(ENB, 100)
pwm_left.start(0)
pwm_right.start(0)
return pwm_left, pwm_right
# ==== 电机控制函数 ====
def motors_forward(pwm_left, pwm_right, speed):
# 左轮前进
GPIO.output(IN1, GPIO.HIGH)
GPIO.output(IN2, GPIO.LOW)
pwm_left.ChangeDutyCycle(speed)
# 右轮前进
GPIO.output(IN3, GPIO.HIGH)
GPIO.output(IN4, GPIO.LOW)
pwm_right.ChangeDutyCycle(speed)
def motors_stop(pwm_left, pwm_right):
GPIO.output(IN1, GPIO.LOW)
GPIO.output(IN2, GPIO.LOW)
pwm_left.ChangeDutyCycle(0)
GPIO.output(IN3, GPIO.LOW)
GPIO.output(IN4, GPIO.LOW)
pwm_right.ChangeDutyCycle(0)
# ==== 主函数 ====
def main():
global encoder_left_count, encoder_right_count
encoder_left_count = 0
encoder_right_count = 0
pwm_left, pwm_right = setup()
print("两个电机开始转动...")
motors_forward(pwm_left, pwm_right, 50)
time.sleep(3) # 运行 3 秒
motors_stop(pwm_left, pwm_right)
print("两个电机停止")
print("左编码器计数:", encoder_left_count)
print("右编码器计数:", encoder_right_count)
GPIO.cleanup()
if __name__ == "__main__":
main()
这是我用VScode运行的结果

雷达驱动:
这里注意了,每个人的雷达可能不一样,记得找自己的商家要雷达资料,我这里用的是镭神N10
雷达驱动包同样放在百度网盘里面
首先把雷达插在树莓派上面,输入这个指令看雷达连接的串口
ls /dev/tty*找到之后,打开雷达驱动的包,打开,把包里面的串口号改成自己雷达的串口号我这里是/dev/ttyCH343USB0
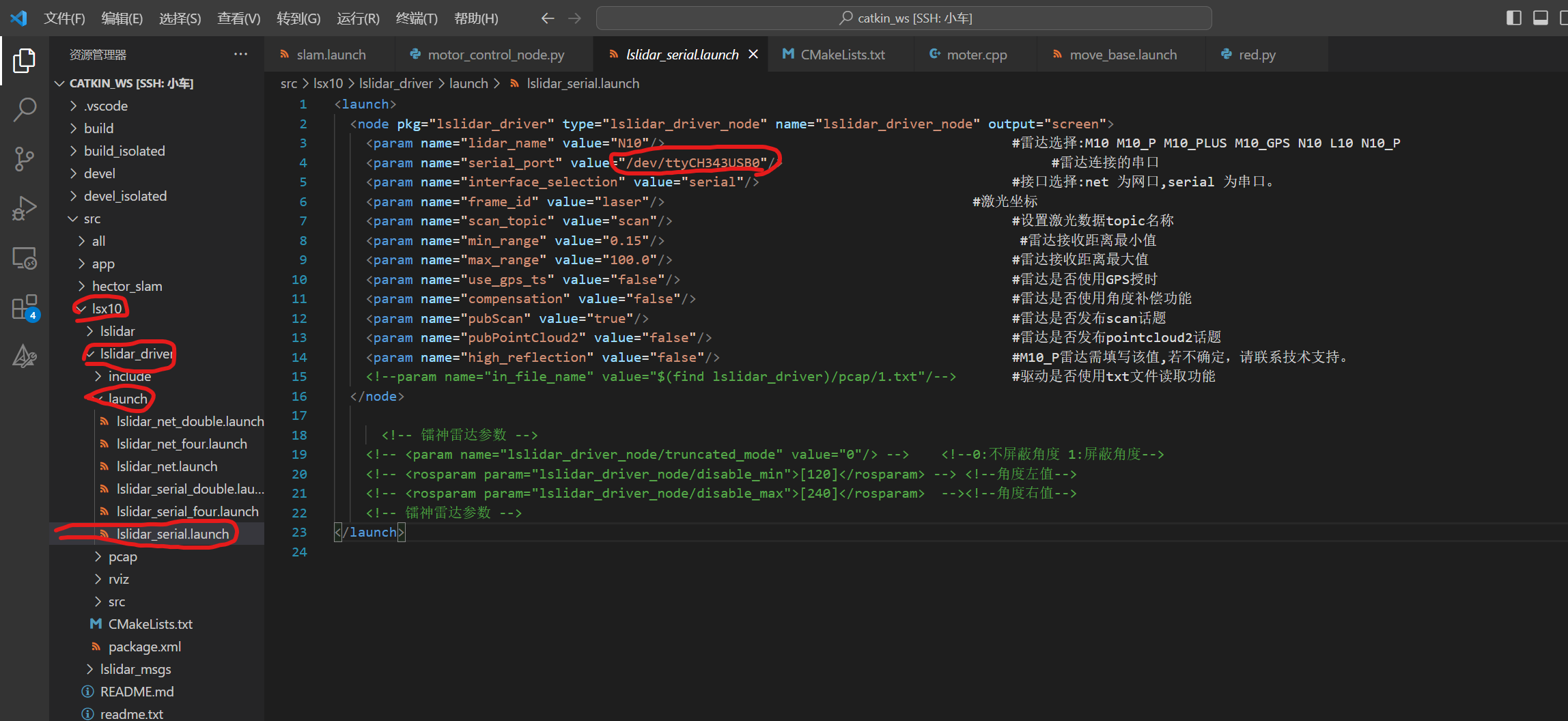
改完了之后运行这个launch文件,这是你的雷达驱动
roslaunch lslidar_driver lslidar_serial.launch看到这样的输出,就代表你的雷达驱动没问题了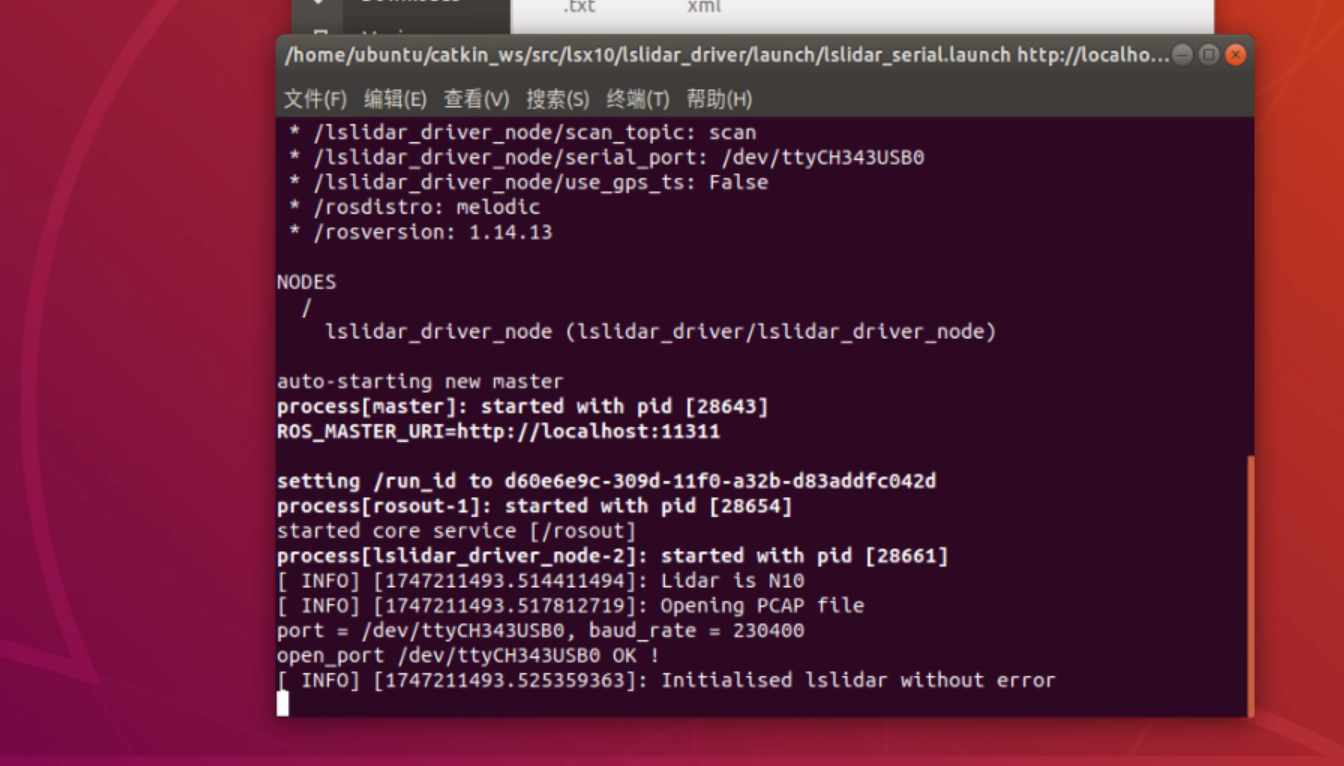
RVIZ获取雷达数据:
首先是运行雷达驱动,记住每次都要运行,然后打开rviz可视化
rosrun rviz rviz雷达驱动和rviz都运行了之后就可以看数据了,首先把左上角的map改成自己雷达的地图,我的是laser,然后左下角add添加By topic的laserscan。选好了之后就可以看到我这个类似的点云图了。如果不知道自己的雷达该怎么改,可以看自己的雷达驱动文件,前面说了lslidar_serial.launch,这个文件里面都有的
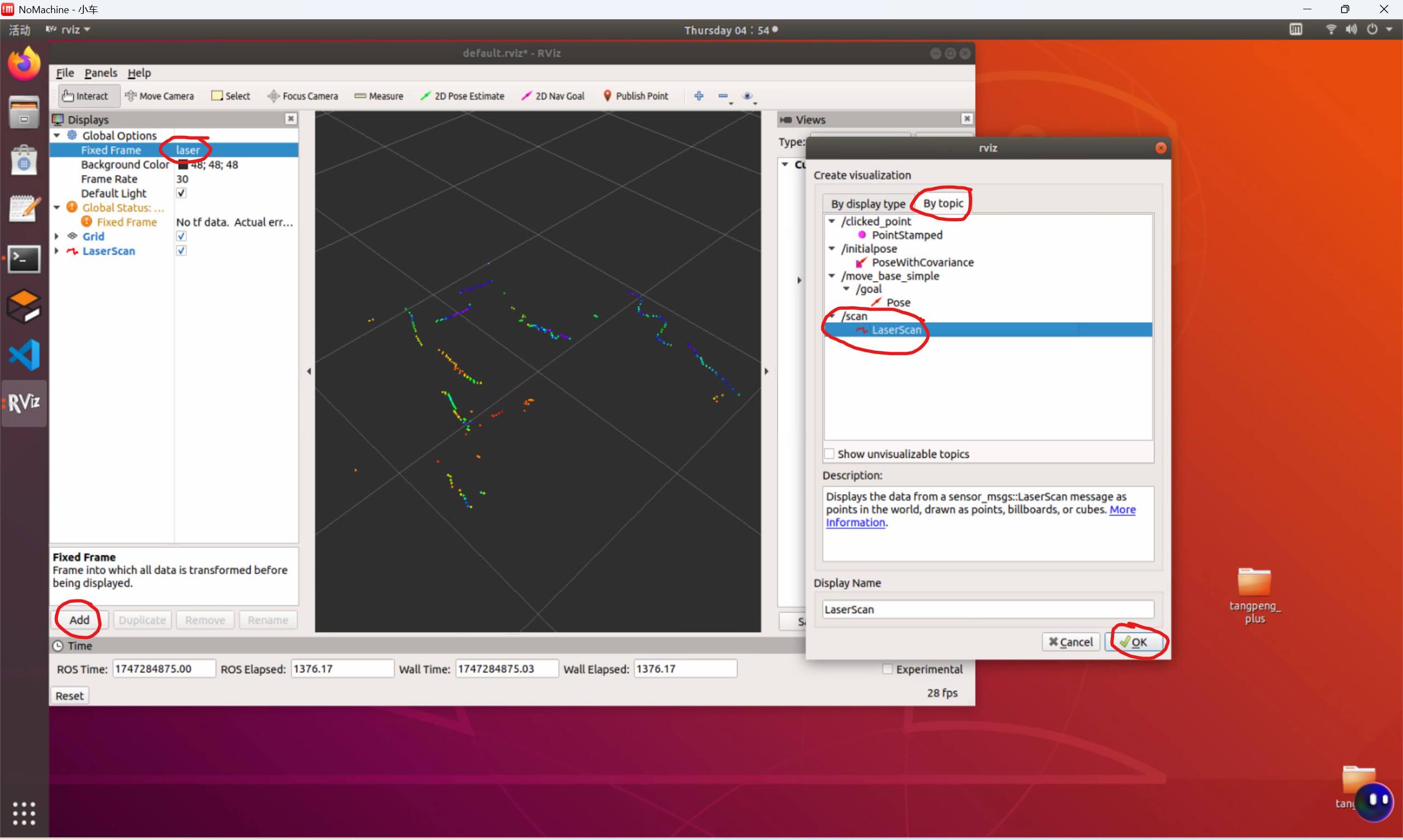
如果看到了自己雷达的数据,证明这一步成功了
hector_slam建图:
前面的按照我的步骤来就不会出错,这一步才是最烦人的,我也是搞了一天。
一定要知道建图分两种,一种是实时建图,这个就是你每次打开的新的rviz都是一个新的地图,如果换了环境也可以用。另一种就是静态建图,这是规定了地图的,也就是实时建图完成了之后保存地图,之后每次用的地图就是之前保存的静态地图。静态地图精度高一些,但是地图固定了,所以我建议的是实时地图,我这里采用的也是实时建图。
首先是要明确,这是实物,不是仿真。然后就可以下载hector_slam的ros包了
sudo apt-get update
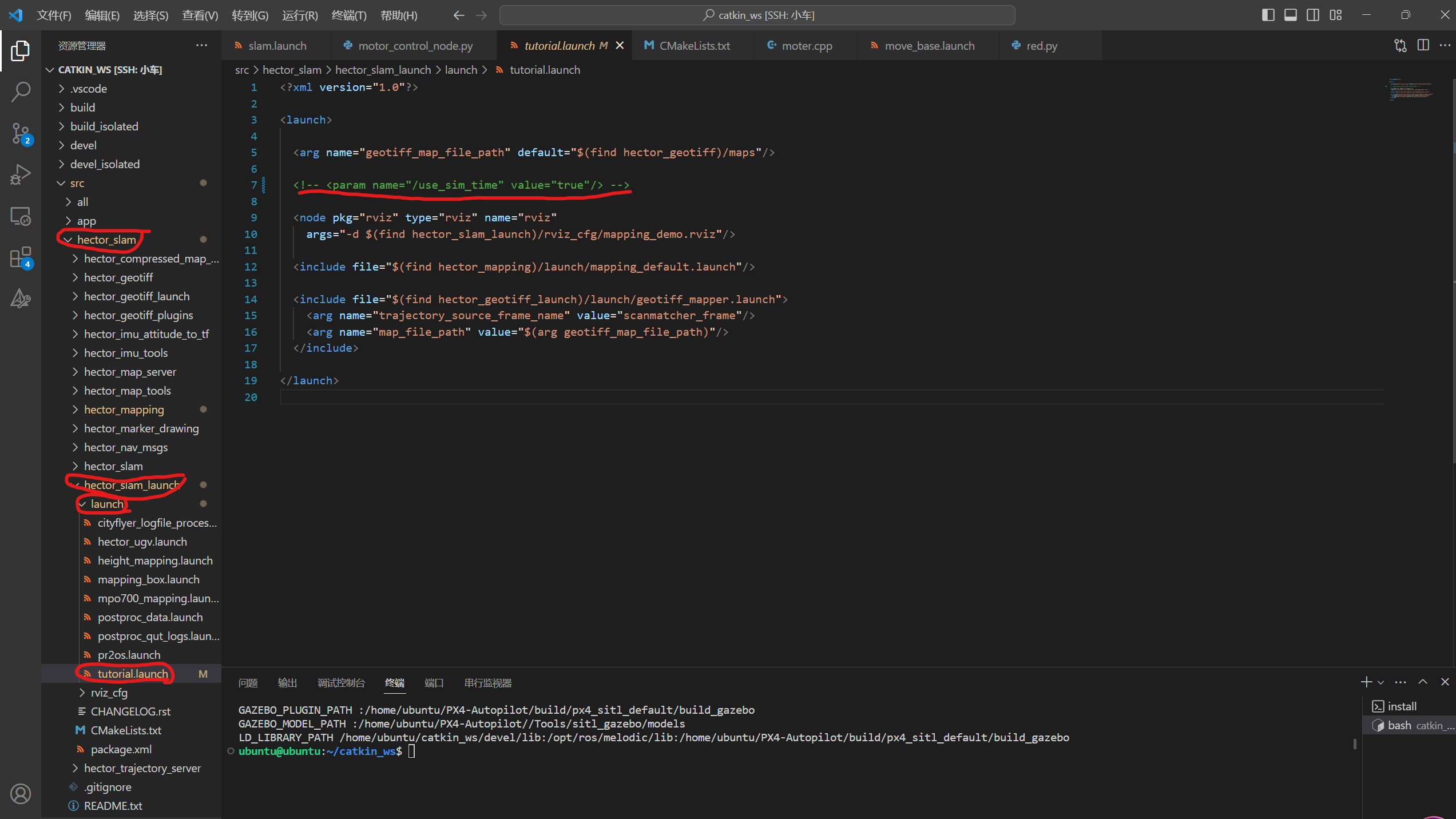
sudo apt-get install ros-melodic-hector-slam下载完了就放在src下面,然后打开里面的tutorial.launch。这里注意绿色的部分就是仿真时间,要么像我一样把他注释掉,要么改成false
改完了之后还有一个地方就是坐标系的转化,这里官方的lsx10包里面有个map->nav的地图,但是这里地图没用到nav,必须把这个中间地图去掉,才能把地图连起来map->base_link->laser。如果不去掉就是map->nav断开base_link-laser。
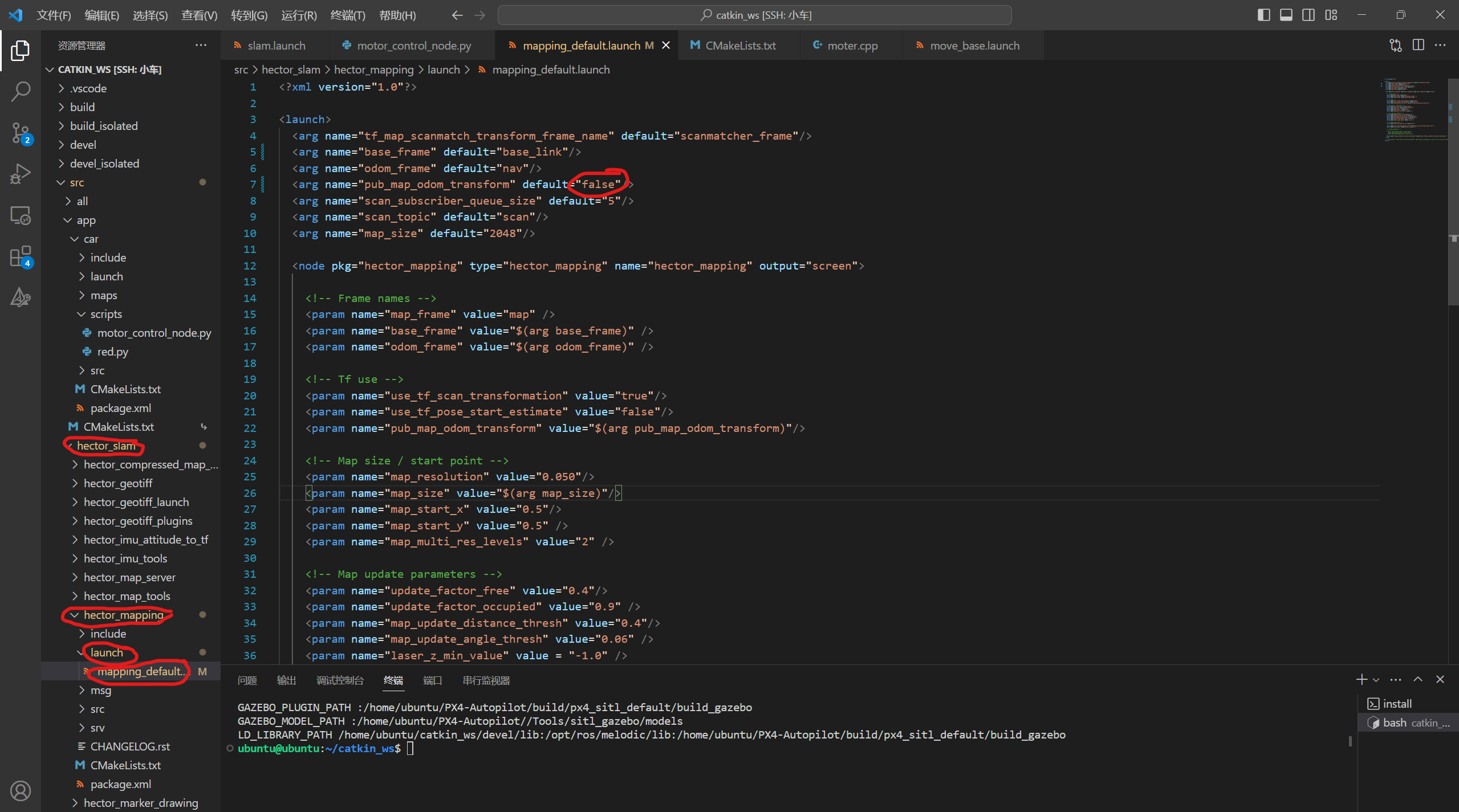
找到我这个mapping_default.launch文件,然后把这个pub_map_odom_transform参数改成false
改完之后就是需要静态转换了,我下面已经写好了这个launch文件,里面包括了雷达初始化,第一个就是雷达初始化,然后下面就是坐标静态转换,后面那个rviz可视化可以关掉,但是前面调试的时候还是加上,方便看
<?xml version="1.0"?>
<launch>
<!-- 启动激光雷达驱动程序 -->
<include file="$(find lslidar_driver)/launch/lslidar_serial.launch">
<!-- 如果需要,可以在这里添加激光雷达驱动程序的参数 -->
</include>
<!-- 发布从 base_link 到 laser 的静态变换 -->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser"
args="0 -0.2 0 0 0 0 base_link laser 100" />
<node pkg="tf" type="static_transform_publisher" name="map_to_base_link"
args="0 0 0 0 0 0 map base_link 100" />
<!-- 启动 Hector SLAM -->
<!-- <include file="$(find car)/launch/my_slam.launch"/> -->
<include file="$(find hector_slam_launch)/launch/tutorial.launch"/>
<!-- 启动 Hector SLAM 配置文件中的参数 -->
<param name="base_frame" value="base_link" />
<param name="map_frame" value="map" />
<!-- 启动 RViz 用于可视化 -->
<!-- <node pkg="rviz" type="rviz" name="rviz" args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/> -->
</launch>
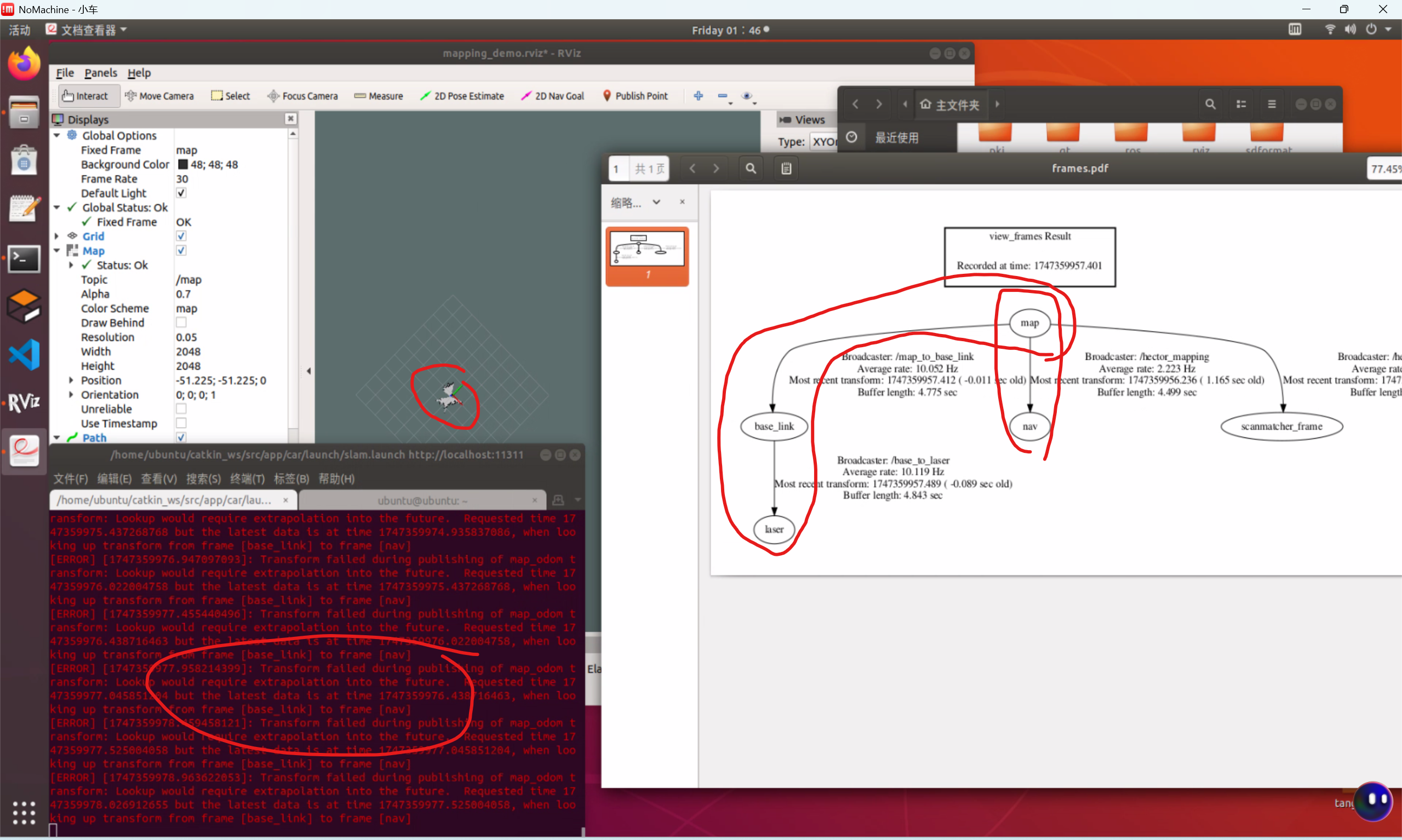
如果运行我这个launch文件出现下面这个报错,那就是nav那个没改,把他改成false
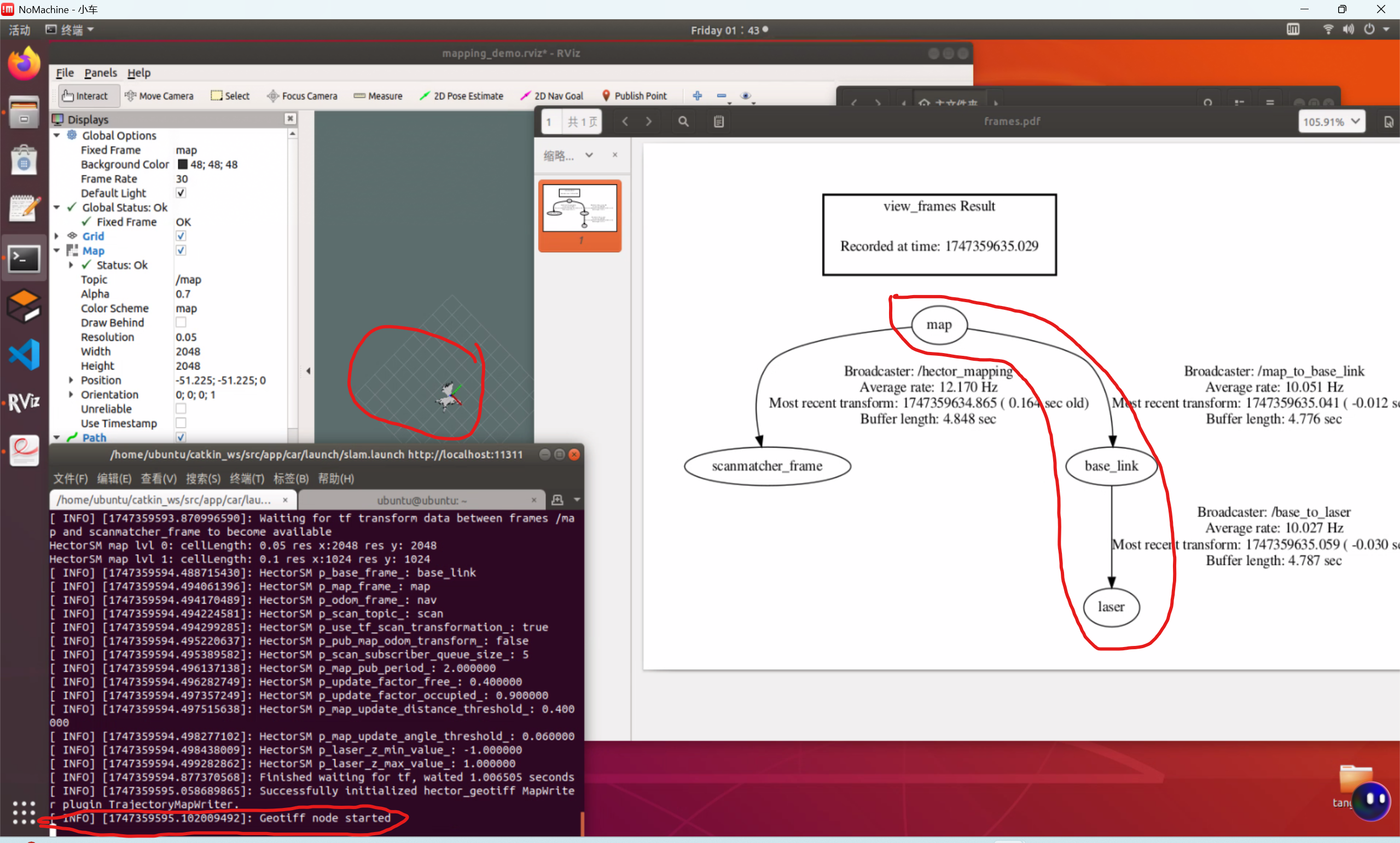
为了确保坐标系是正确的,运行我这个launch文件,然后输入下面的指令。他会生成一个坐标系转换图,在你的主目录下面,然后看到map->base_link->laser就说明是对的,也实时建图启动成功了
如果说运行像我这个一样,那就是雷达的地图转换的一些配置还有问题,下面这个别看地图是有了,但是其实坐标系是有问题的,我也是找了好久,这个不解决的话,后续路径规划,避障时会有问题的,这就是前面那个参数没改成false的问题,改了就好了
这些配置都搞好了之后基本上就可以了,然后就可以写代码控制小车了,我这里是比较简单的控制,后续都可以扩展
python控制:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from geometry_msgs.msg import Twist, PoseWithCovarianceStamped, PoseStamped
import RPi.GPIO as GPIO
import time
import math
# ==================== 电机控制引脚 ====================
LEFT_IN1 = 22
LEFT_IN2 = 23
LEFT_EN = 18
RIGHT_IN1 = 24
RIGHT_IN2 = 25
RIGHT_EN = 19
PWM_FREQ = 10000
# ==================== 编码器引脚 ====================
ENC_L_A = 17
ENC_L_B = 27
ENC_R_A = 5
ENC_R_B = 6
# ==================== 参数 ====================
WHEEL_BASE = 0.129
WHEEL_DIAMETER = 0.047
PULSES_PER_REV = 266
SCALE_PWM = 30
# ==================== 全局变量 ====================
left_pulse_count = 0
right_pulse_count = 0
current_x = 0.0
current_y = 0.0
current_theta = 0.0
# ==================== GPIO 初始化 ====================
def setup_gpio():
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
motor_pins = [LEFT_IN1, LEFT_IN2, LEFT_EN, RIGHT_IN1, RIGHT_IN2, RIGHT_EN]
for pin in motor_pins:
GPIO.setup(pin, GPIO.OUT)
GPIO.setup(ENC_L_A, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(ENC_R_A, GPIO.IN, pull_up_down=GPIO.PUD_UP)
global left_pwm, right_pwm
left_pwm = GPIO.PWM(LEFT_EN, PWM_FREQ)
right_pwm = GPIO.PWM(RIGHT_EN, PWM_FREQ)
left_pwm.start(0)
right_pwm.start(0)
GPIO.add_event_detect(ENC_L_A, GPIO.BOTH, callback=encoder_callback_L)
GPIO.add_event_detect(ENC_R_A, GPIO.BOTH, callback=encoder_callback_R)
# ==================== 编码器回调 ====================
def encoder_callback_L(channel):
global left_pulse_count
left_pulse_count += 1
def encoder_callback_R(channel):
global right_pulse_count
right_pulse_count += 1
# ==================== 电机控制 ====================
def set_motor(left_speed, right_speed):
GPIO.output(LEFT_IN1, GPIO.HIGH if left_speed >= 0 else GPIO.LOW)
GPIO.output(LEFT_IN2, GPIO.LOW if left_speed >= 0 else GPIO.HIGH)
left_pwm.ChangeDutyCycle(min(abs(left_speed), 100))
GPIO.output(RIGHT_IN1, GPIO.HIGH if right_speed >= 0 else GPIO.LOW)
GPIO.output(RIGHT_IN2, GPIO.LOW if right_speed >= 0 else GPIO.HIGH)
right_pwm.ChangeDutyCycle(min(abs(right_speed), 100))
def stop_motor():
left_pwm.ChangeDutyCycle(0)
right_pwm.ChangeDutyCycle(0)
GPIO.output(LEFT_IN1, GPIO.LOW)
GPIO.output(LEFT_IN2, GPIO.LOW)
GPIO.output(RIGHT_IN1, GPIO.LOW)
GPIO.output(RIGHT_IN2, GPIO.LOW)
rospy.loginfo("电机已停止")
# ==================== 工具函数 ====================
def get_distance(x1, y1, x2, y2):
return math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2)
def get_angle_to_goal(x1, y1, x2, y2):
return math.atan2(y2 - y1, x2 - x1)
def normalize_angle(angle):
while angle > math.pi:
angle -= 2 * math.pi
while angle < -math.pi:
angle += 2 * math.pi
return angle
# ==================== 旋转一定角度(正数左转,负数右转) ====================
def rotate_angle(target_angle_rad):
# 左右转速度设置(正:左转,负:右转)
direction = 1 if target_angle_rad > 0 else -1
duty = 40 # 占空比
duration = abs(target_angle_rad) / (math.pi / 2) * 1.2 # 简化估算,90度约1.2s
rospy.loginfo("开始旋转 %.2f 弧度,方向:%s", target_angle_rad, "左" if direction > 0 else "右")
if direction > 0:
set_motor(-duty, duty)
else:
set_motor(duty, -duty)
time.sleep(duration)
stop_motor()
rospy.sleep(0.5)
# ==================== 控制机器人到达目标点 ====================
def move_to_goal(goal_x, goal_y):
global current_x, current_y, current_theta, left_pulse_count, right_pulse_count
# 计算方向
goal_angle = get_angle_to_goal(current_x, current_y, goal_x, goal_y)
# 旋转对准目标方向
max_step = 0.085
angle_diff = normalize_angle(goal_angle - current_theta)
while abs(angle_diff) > 0.1745:
step = max_step if angle_diff > 0 else -max_step
if abs(angle_diff) < abs(step):
step = angle_diff
rotate_angle(step)
angle_diff = normalize_angle(goal_angle - current_theta)
# ========== 开始前进 ==========
rospy.loginfo("开始前进")
# 记录初始编码器值
start_left = left_pulse_count
start_right = right_pulse_count
# 理想目标距离
target_distance = get_distance(current_x, current_y, goal_x, goal_y)
wheel_circumference = math.pi * WHEEL_DIAMETER
target_pulses = (target_distance / wheel_circumference) * PULSES_PER_REV
base_pwm = 20
pwm_diff = 2
rate = rospy.Rate(20)
while not rospy.is_shutdown():
current_left = left_pulse_count - start_left
current_right = right_pulse_count - start_right
avg_pulse = (current_left + current_right) / 2.0
# 判断是否到达目标距离
if avg_pulse >= target_pulses or get_distance(current_x, current_y, goal_x, goal_y) < 0.15:
break
# 编码器差值调节PWM
diff = current_left - current_right
if diff > 5:
# 左边快了
left_pwm_val = base_pwm - pwm_diff
right_pwm_val = base_pwm + pwm_diff
elif diff < -5:
# 右边快了
left_pwm_val = base_pwm + pwm_diff
right_pwm_val = base_pwm - pwm_diff
else:
# 两边基本一致
left_pwm_val = base_pwm
right_pwm_val = base_pwm
set_motor(left_pwm_val, right_pwm_val)
rate.sleep()
stop_motor()
rospy.loginfo("到达目标点")
# ==================== 订阅 SLAM 位姿 ====================
def pose_callback(msg):
global current_x, current_y, current_theta
current_x = msg.pose.position.x
current_y = msg.pose.position.y
orientation_q = msg.pose.orientation
_, _, current_theta = euler_from_quaternion(orientation_q.x, orientation_q.y, orientation_q.z, orientation_q.w)
def euler_from_quaternion(x, y, z, w):
t0 = +2.0 * (w * x + y * z)
t1 = +1.0 - 2.0 * (x * x + y * y)
roll_x = math.atan2(t0, t1)
t2 = +2.0 * (w * y - z * x)
t2 = +1.0 if t2 > +1.0 else t2
t2 = -1.0 if t2 < -1.0 else t2
pitch_y = math.asin(t2)
t3 = +2.0 * (w * z + x * y)
t4 = +1.0 - 2.0 * (y * y + z * z)
yaw_z = math.atan2(t3, t4)
return roll_x, pitch_y, yaw_z
# ==================== 初始位姿 ====================
def publish_initial_pose():
pub = rospy.Publisher('/initialpose', PoseWithCovarianceStamped, queue_size=10)
rospy.sleep(1.0)
pose = PoseWithCovarianceStamped()
pose.header.stamp = rospy.Time.now()
pose.header.frame_id = "map"
pose.pose.pose.position.x = 0.0
pose.pose.pose.position.y = 0.0
pose.pose.pose.orientation.w = 1.0
pub.publish(pose)
rospy.loginfo("已发布初始位姿")
# ==================== 主函数 ====================
def motor_driver_node():
rospy.init_node('moter')
setup_gpio()
publish_initial_pose()
rospy.Subscriber('/slam_out_pose', PoseStamped, pose_callback)
rospy.loginfo("motor_driver_node 已启动,监听 /slam_out_pose")
move_to_goal(1.0, 1.0)
try:
rospy.spin()
except rospy.ROSInterruptException:
pass
finally:
stop_motor()
GPIO.cleanup()
if __name__ == '__main__':
motor_driver_node()
这个是全写在一块的,方便初学者直接运行,上面的代码直接复制粘贴就能直接运行,唯一需要注意的是这里使用了GPIO,如果没下载的话需要下载一个RPI.GPIO,然后就能直接运行了,这是一个跑到(1,1)的测试代码
C++控制:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <geometry_msgs/PoseWithCovarianceStamped.h>
#include <geometry_msgs/PoseStamped.h>
#include <wiringPi.h>
#include <softPwm.h>
#include <cmath>
#include <iostream>
#include <tf/tf.h>
using namespace std;
// ==================== 电机控制引脚 ====================
#define LEFT_IN1 22
#define LEFT_IN2 23
#define LEFT_EN 18
#define RIGHT_IN1 24
#define RIGHT_IN2 25
#define RIGHT_EN 19
#define PWM_FREQ 10000
// ==================== 编码器引脚 ====================
#define ENC_L_A 17
#define ENC_L_B 27
#define ENC_R_A 5
#define ENC_R_B 6
// ==================== 参数 ====================
#define WHEEL_BASE 0.129
#define WHEEL_DIAMETER 0.047
#define PULSES_PER_REV 266
#define SCALE_PWM 30
// ==================== 全局变量 ====================
volatile int left_pulse_count = 0;
volatile int right_pulse_count = 0;
double current_x = 0.0;
double current_y = 0.0;
double current_theta = 0.0;
// ==================== 编码器回调 ====================
void encoder_callback_L() {
left_pulse_count++;
}
void encoder_callback_R() {
right_pulse_count++;
}
// ==================== GPIO 初始化 ====================
void setup_gpio() {
wiringPiSetupGpio(); // 使用 BCM 引脚编号
// 设置电机引脚
pinMode(LEFT_IN1, OUTPUT);
pinMode(LEFT_IN2, OUTPUT);
pinMode(LEFT_EN, OUTPUT);
pinMode(RIGHT_IN1, OUTPUT);
pinMode(RIGHT_IN2, OUTPUT);
pinMode(RIGHT_EN, OUTPUT);
// 设置编码器引脚
pinMode(ENC_L_A, INPUT);
pinMode(ENC_R_A, INPUT);
pullUpDnControl(ENC_L_A, PUD_UP);
pullUpDnControl(ENC_R_A, PUD_UP);
// 启动 PWM 控制
softPwmCreate(LEFT_EN, 0, 100);
softPwmCreate(RIGHT_EN, 0, 100);
// 编码器事件检测
wiringPiISR(ENC_L_A, INT_EDGE_BOTH, encoder_callback_L);
wiringPiISR(ENC_R_A, INT_EDGE_BOTH, encoder_callback_R);
}
// // ==================== 编码器回调 ====================
// void encoder_callback_L() {
// left_pulse_count++;
// }
// void encoder_callback_R() {
// right_pulse_count++;
// }
// ==================== 电机控制 ====================
void set_motor(int left_speed, int right_speed) {
digitalWrite(LEFT_IN1, left_speed >= 0 ? HIGH : LOW);
digitalWrite(LEFT_IN2, left_speed >= 0 ? LOW : HIGH);
softPwmWrite(LEFT_EN, std::min(abs(left_speed), 100));
digitalWrite(RIGHT_IN1, right_speed >= 0 ? HIGH : LOW);
digitalWrite(RIGHT_IN2, right_speed >= 0 ? LOW : HIGH);
softPwmWrite(RIGHT_EN, std::min(abs(right_speed), 100));
}
void stop_motor() {
softPwmWrite(LEFT_EN, 0);
softPwmWrite(RIGHT_EN, 0);
digitalWrite(LEFT_IN1, LOW);
digitalWrite(LEFT_IN2, LOW);
digitalWrite(RIGHT_IN1, LOW);
digitalWrite(RIGHT_IN2, LOW);
ROS_INFO("电机已停止");
}
// ==================== 工具函数 ====================
double get_distance(double x1, double y1, double x2, double y2) {
return sqrt(pow(x2 - x1, 2) + pow(y2 - y1, 2));
}
double get_angle_to_goal(double x1, double y1, double x2, double y2) {
return atan2(y2 - y1, x2 - x1);
}
double normalize_angle(double angle) {
while (angle > M_PI) {
angle -= 2 * M_PI;
}
while (angle < -M_PI) {
angle += 2 * M_PI;
}
return angle;
}
// ==================== 旋转一定角度(正数左转,负数右转) ====================
void rotate_angle(double target_angle_rad) {
int direction = (target_angle_rad > 0) ? 1 : -1;
int duty = 40;
double duration = fabs(target_angle_rad) / (M_PI / 2) * 1.2;
ROS_INFO("开始旋转 %.2f 弧度,方向:%s", target_angle_rad, (direction > 0) ? "左" : "右");
if (direction > 0) {
set_motor(-duty, duty);
} else {
set_motor(duty, -duty);
}
delay(duration * 1000); // 延时的单位是毫秒
stop_motor();
ros::Duration(0.5).sleep();
}
// ==================== 控制机器人到达目标点 ====================
void move_to_goal(double goal_x, double goal_y) {
double goal_angle = get_angle_to_goal(current_x, current_y, goal_x, goal_y);
double max_step = 0.085;
double angle_diff = normalize_angle(goal_angle - current_theta);
while (fabs(angle_diff) > 0.1745) { // 10度
double step = (angle_diff > 0) ? max_step : -max_step;
if (fabs(angle_diff) < fabs(step)) {
step = angle_diff;
}
rotate_angle(step);
angle_diff = normalize_angle(goal_angle - current_theta);
}
ROS_INFO("开始前进");
int start_left = left_pulse_count;
int start_right = right_pulse_count;
double target_distance = get_distance(current_x, current_y, goal_x, goal_y);
double wheel_circumference = M_PI * WHEEL_DIAMETER;
double target_pulses = (target_distance / wheel_circumference) * PULSES_PER_REV;
int base_pwm = 20;
int pwm_diff = 2;
ros::Rate rate(20);
while (ros::ok()) {
int current_left = left_pulse_count - start_left;
int current_right = right_pulse_count - start_right;
double avg_pulse = (current_left + current_right) / 2.0;
if (avg_pulse >= target_pulses || get_distance(current_x, current_y, goal_x, goal_y) < 0.15) {
break;
}
int diff = current_left - current_right;
int left_pwm_val = (diff > 5) ? base_pwm - pwm_diff : base_pwm + pwm_diff;
int right_pwm_val = (diff < -5) ? base_pwm - pwm_diff : base_pwm + pwm_diff;
set_motor(left_pwm_val, right_pwm_val);
rate.sleep();
}
stop_motor();
ROS_INFO("到达目标点");
}
// ==================== 订阅 SLAM 位姿 ====================
void pose_callback(const geometry_msgs::PoseStamped::ConstPtr& msg) {
current_x = msg->pose.position.x;
current_y = msg->pose.position.y;
current_theta = tf::getYaw(msg->pose.orientation);
}
// ==================== 初始位姿 ====================
void publish_initial_pose(ros::Publisher& pub) {
geometry_msgs::PoseWithCovarianceStamped pose;
pose.header.stamp = ros::Time::now();
pose.header.frame_id = "map";
pose.pose.pose.position.x = 0.0;
pose.pose.pose.position.y = 0.0;
pose.pose.pose.orientation.w = 1.0;
pub.publish(pose);
ROS_INFO("已发布初始位姿");
}
// ==================== 主函数 ====================
int main(int argc, char** argv) {
ros::init(argc, argv, "motor_driver_node");
ros::NodeHandle nh;
setup_gpio();
ros::Publisher pub_initial_pose = nh.advertise<geometry_msgs::PoseWithCovarianceStamped>("/initialpose", 10);
publish_initial_pose(pub_initial_pose);
ros::Subscriber sub_pose = nh.subscribe("/slam_out_pose", 10, pose_callback);
ROS_INFO("motor_driver_node 已启动,监听 /slam_out_pose");
move_to_goal(1.0, 1.0);
ros::spin();
stop_motor();
return 0;
}
这个我也是搞了一段时间的,因为C++的GPIO控制我感觉还是WiningPi好用,但是他这个版本的问题也是让人头疼。我这里用的是WiningPi。需要克隆,这里是下载不了的,所以运行下面的指令
cd ~
git clone https://github.com/WiringPi/WiringPi.git
cd WiringPi
git checkout 2.50
./build
gpio -v如果说克隆失败了或者连接超时了没关系,多试几次,因为没有梯子的缘故,要是有梯子最好。这里一步一步按照我这个来安装就不会出错,我之前搞了半天2.52版本,结果不行我用的2.50版本,最后一条指令时检查版本号,如果没问题那就是没问题了
这里搞完了之后还要在cmakelist里面加连接WiningPi的配置,这个可以直接问chartgpt或者网上找官方配置,因为我的不太一样,所以就没发出来,不过这一步很简单,一般经常用树莓派引脚的WiningPi都是配置了的。所以到这就全部结束了
总结:
这里简单说一下测试的代码,小车是先转弯,每次转一定的角度,然后根据编码器两边相同值走直线到目标位置的,所以小车前轮胎最好是滚珠的,然后雷达判断到目标点了吗,也可以降低小车速度,因为小车有惯性,所以就算到了目标位置还是会往前走一些距离。因为我也是做完了有一段时间了,所以估计中间有些问题已经记不清楚了,可以提问,我是做出来了的,所以这个方法绝对可行。最后,我把小车接线图,lsx10雷达驱动包,hector_slam都放到百度网盘,需要自取,但是我建议学习阶段还是自己来

















 2517
2517

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









