







论文地址:https://arxiv.org/pdf/2410.06472v1
摘要
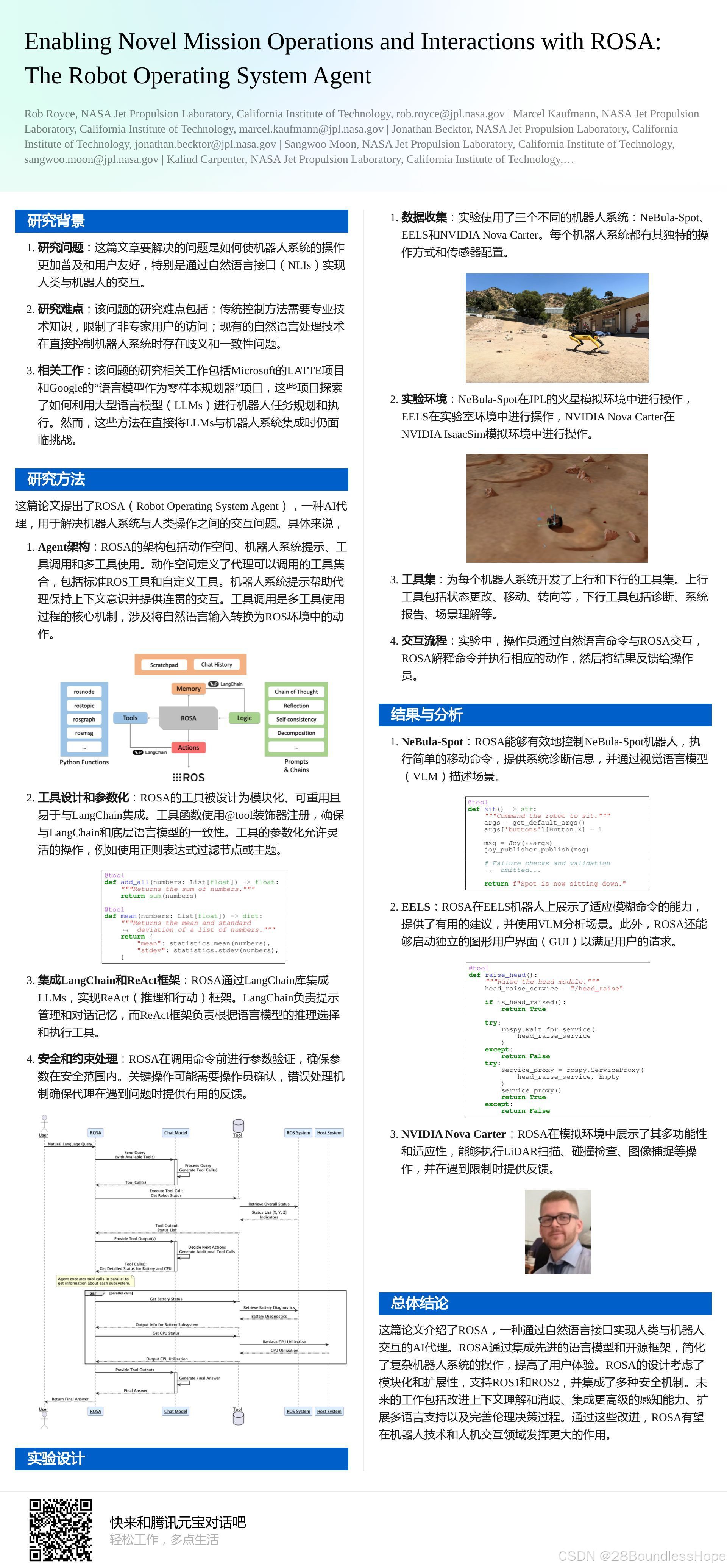
ROSA是由 NASA Jet Propulsion Laboratory 开发的一个先进的 AI 代理,它旨在通过自然语言界面简化机器人的操作和交互。该代理结合了最新的语言模型和开源框架,实现了对 ROS 的高级封装,支持 ROS1 和 ROS2,并集成了参数验证和安全机制。ROSA 的设计模块化,易于扩展,可以适应不同的机器人和任务,同时保证操作的安全性和可靠性。它支持多种交互方式,包括语音和视觉感知,提高了人机交互的效率和直观性。ROSA 还强调了伦理考量,遵循了 Asimov 的机器人三大法则,确保了 AI 集成的安全性和透明度。该论文还展示了 ROSA 在不同机器人系统上的演示,包括 NeBula-Spot、EELS 和 NVIDIA Nova Carter,证明了其在实际应用中的多功能性和适应性。最后,论文强调了 ROSA 在推动机器人技术更广泛采用和提高操作效率方面的重要作用。
论文初读


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









