






2.2服务通信

2.2.1服务通信理论模型
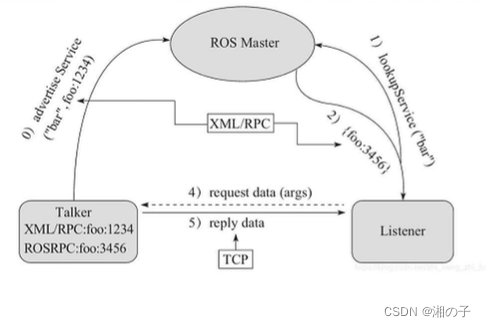
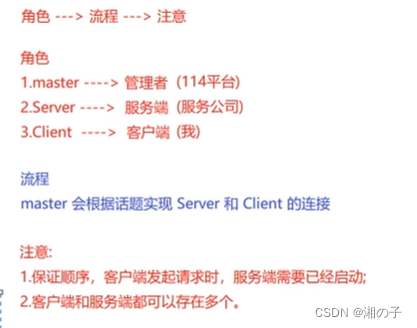
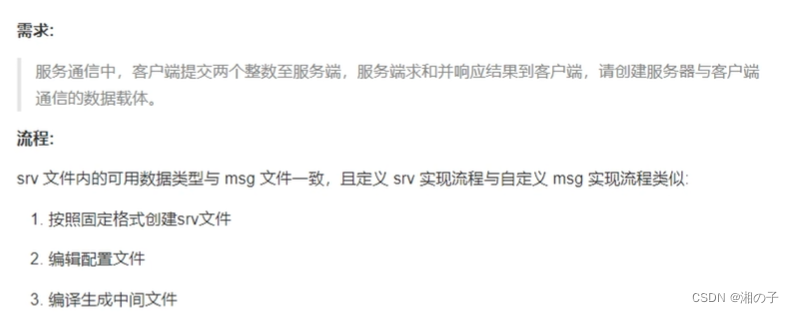
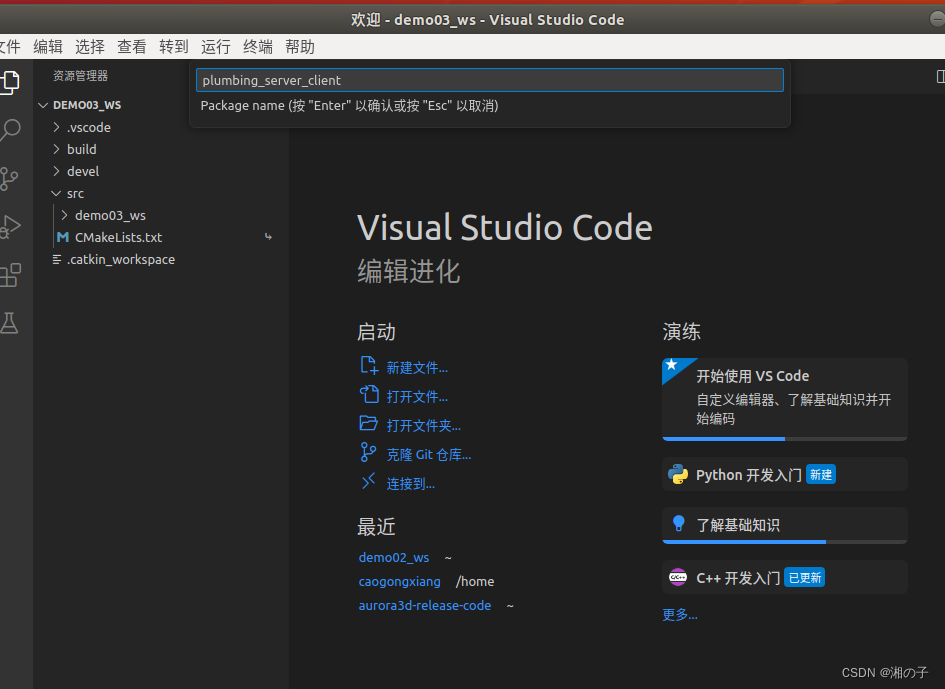
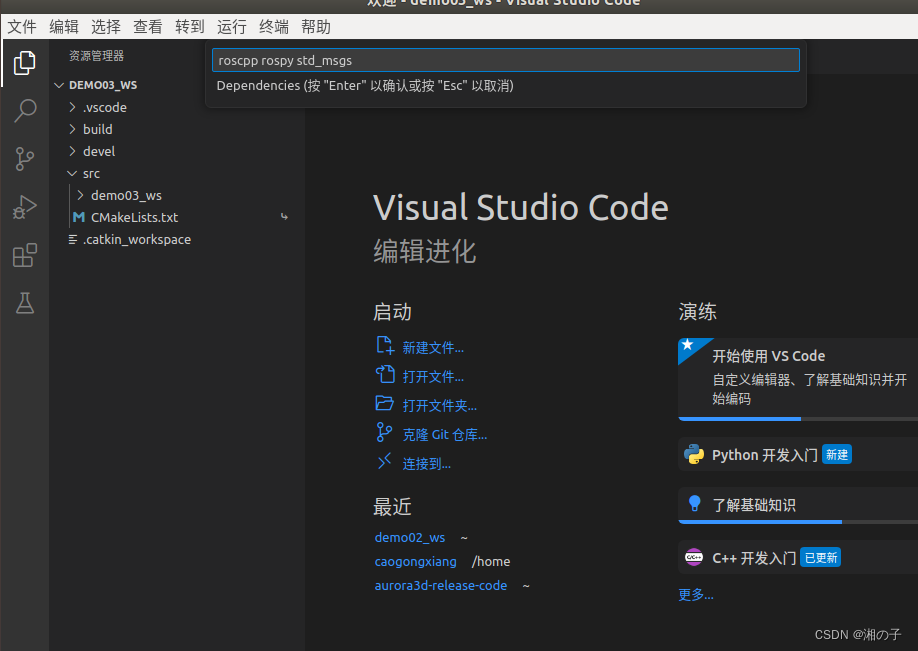
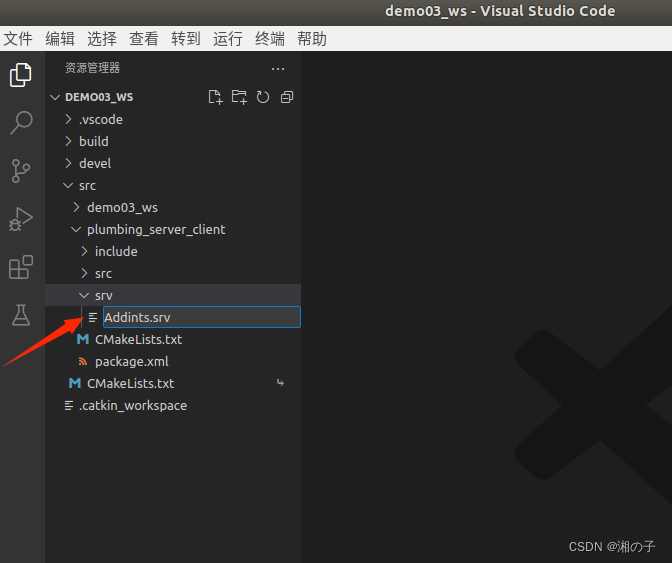
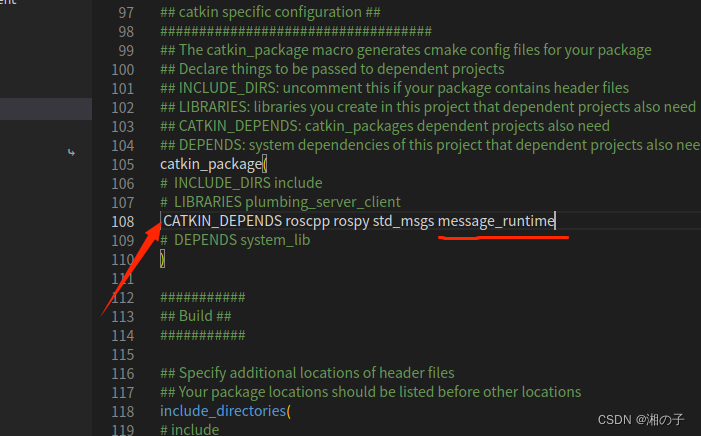
2.2.2服务通信自定义srv


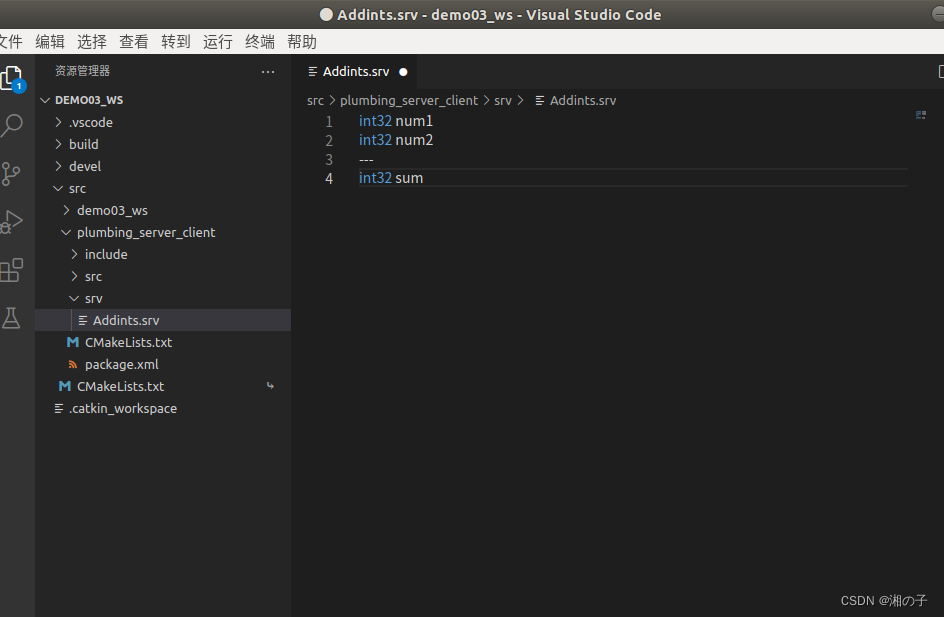

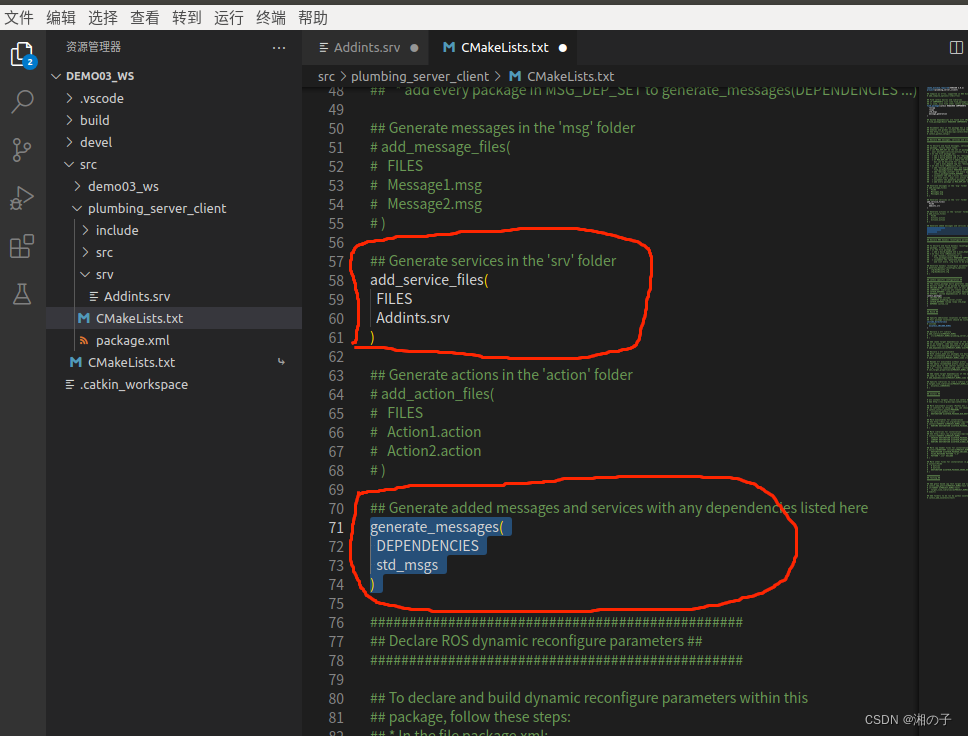

后续调用相关msg时,是从这些中间文件调用的
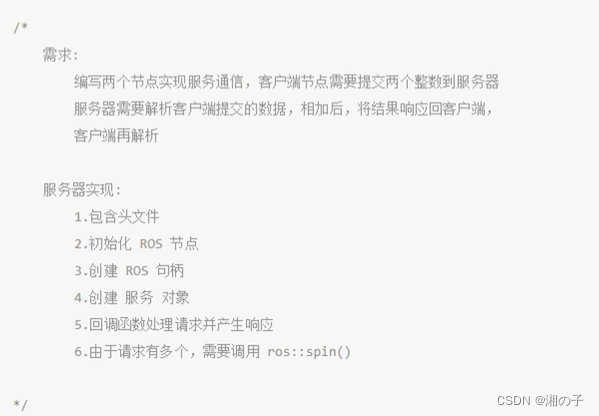
2.2.3服务通信自定义srv调用A(c++)




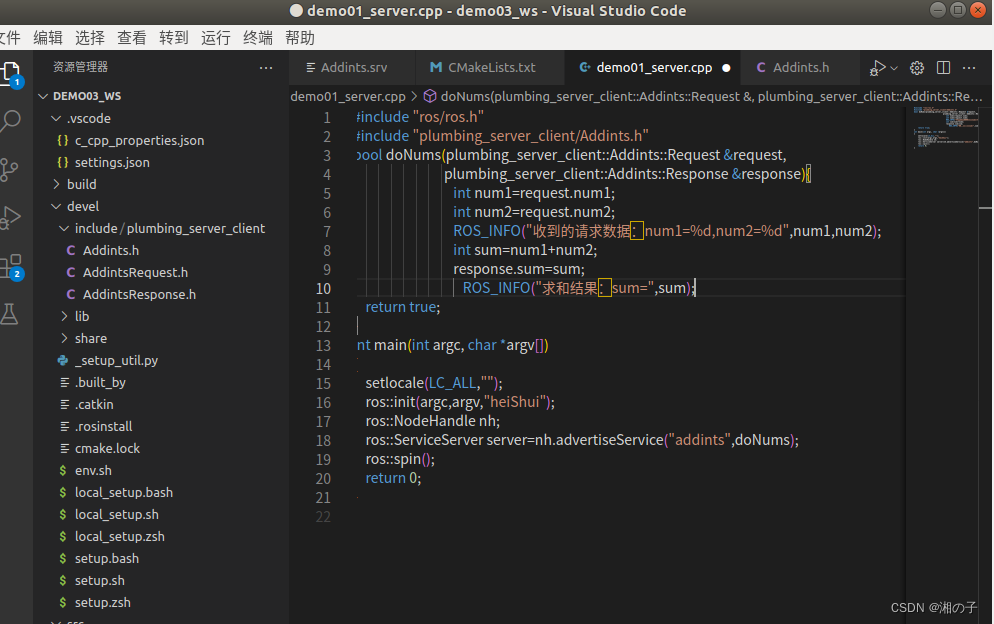
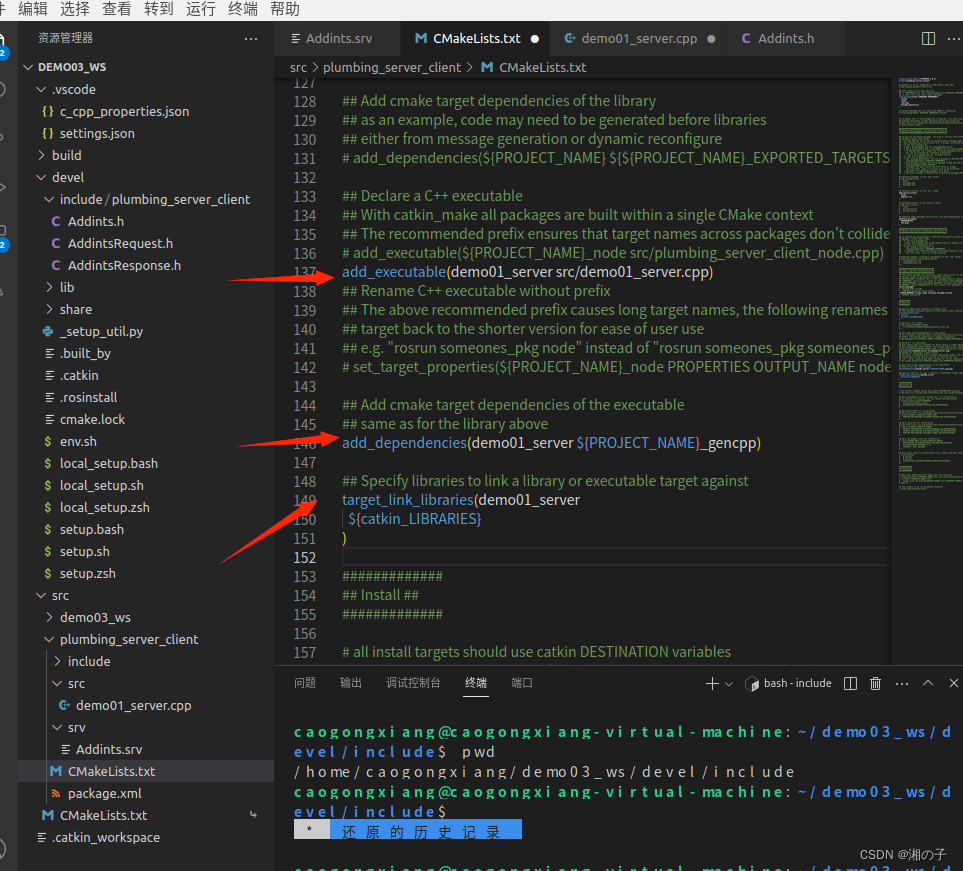
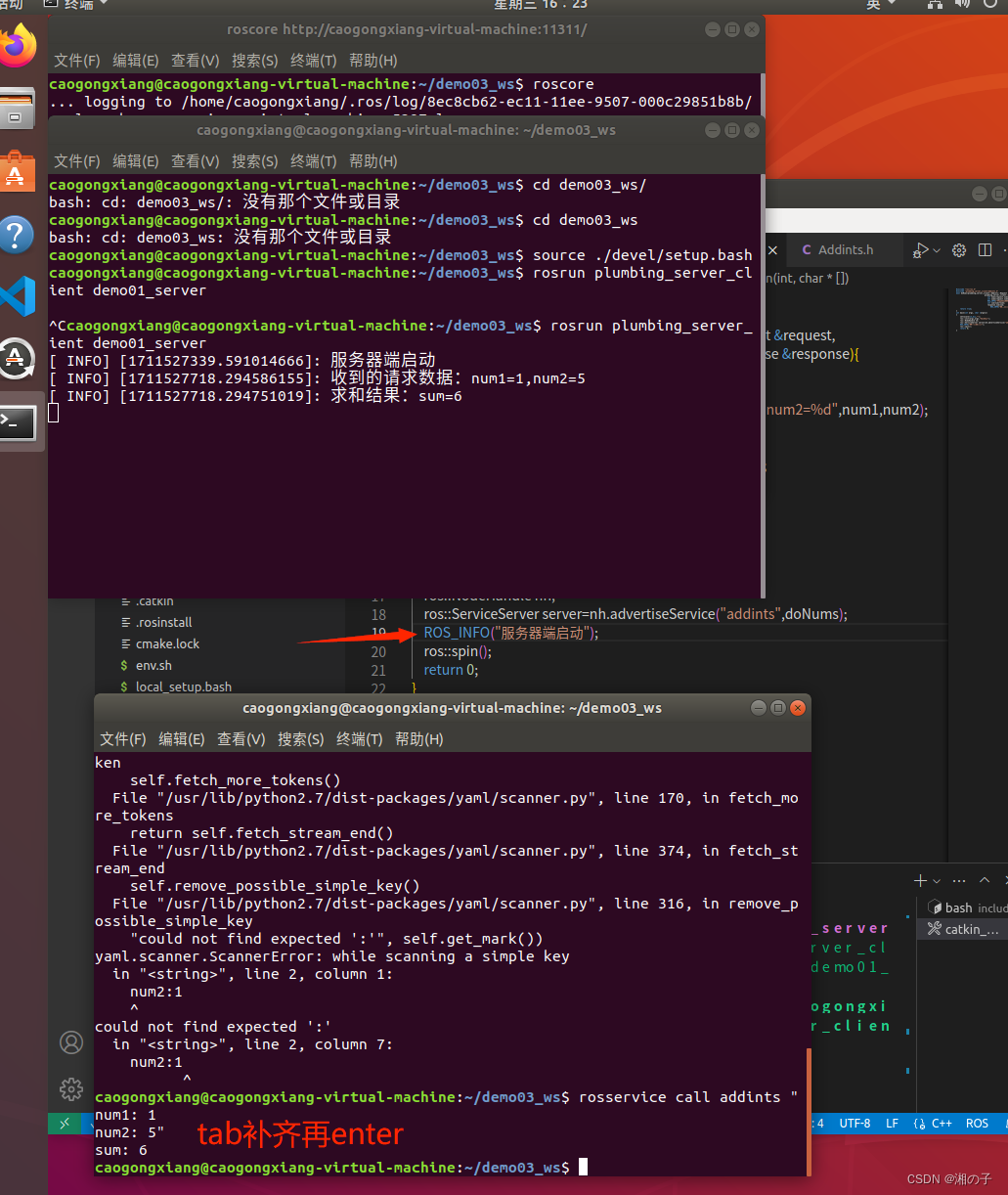
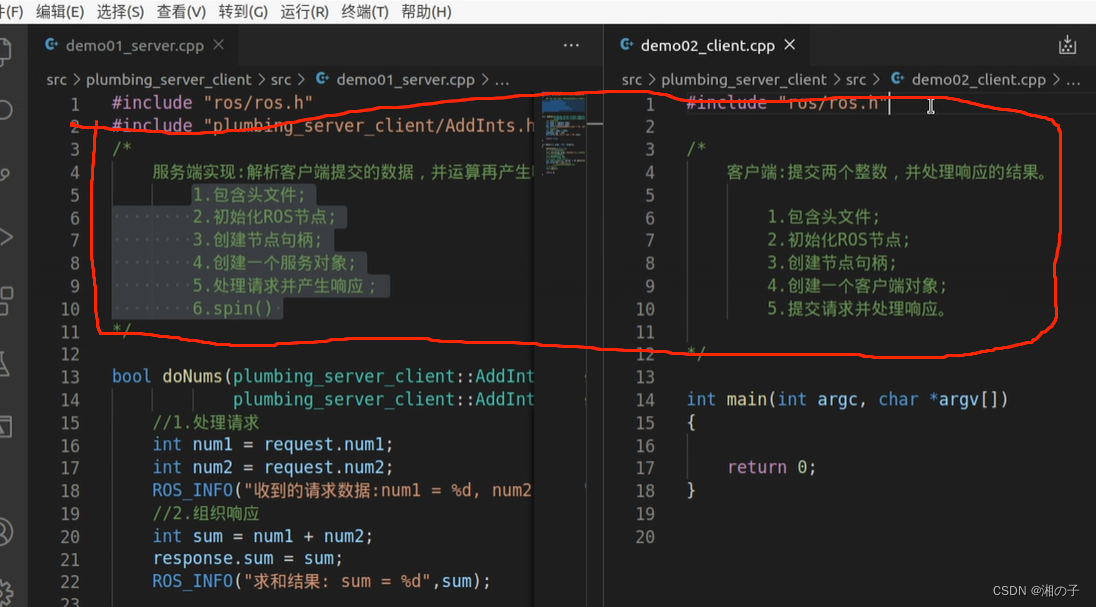
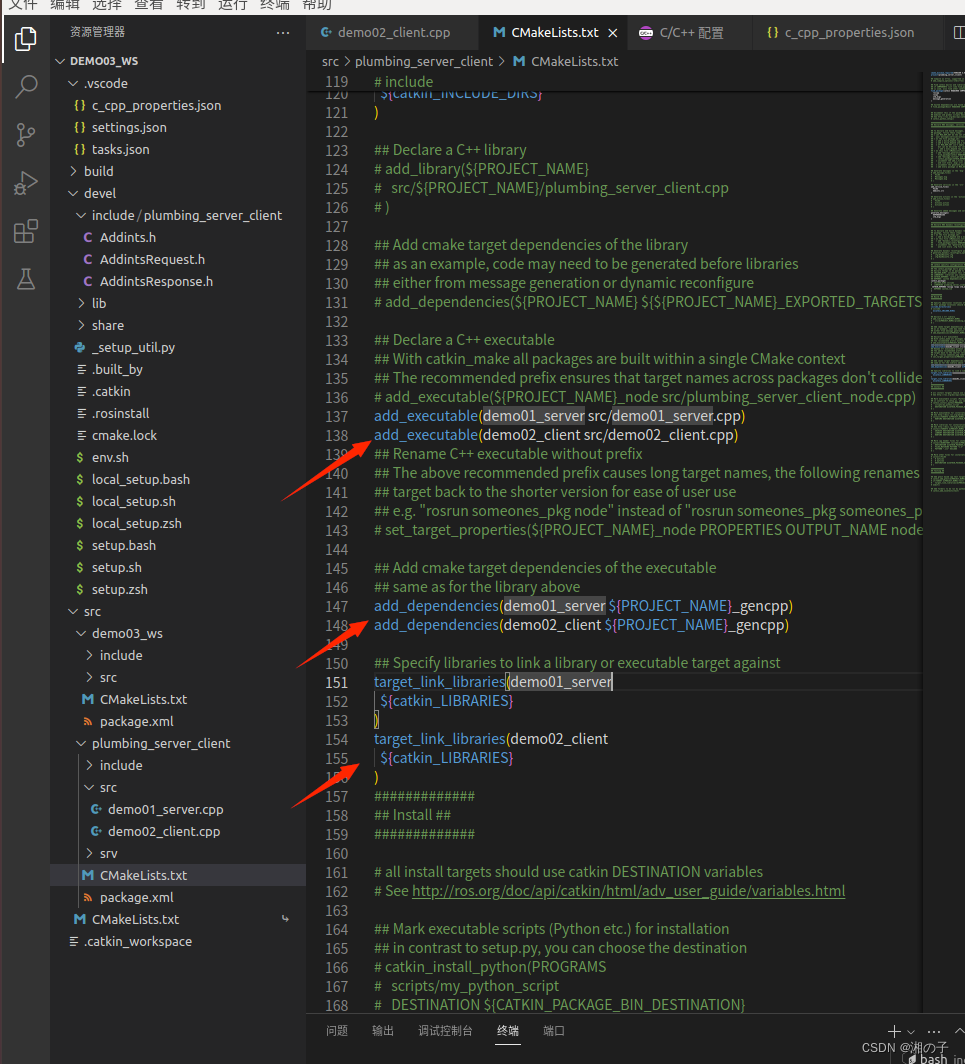
1.服务端
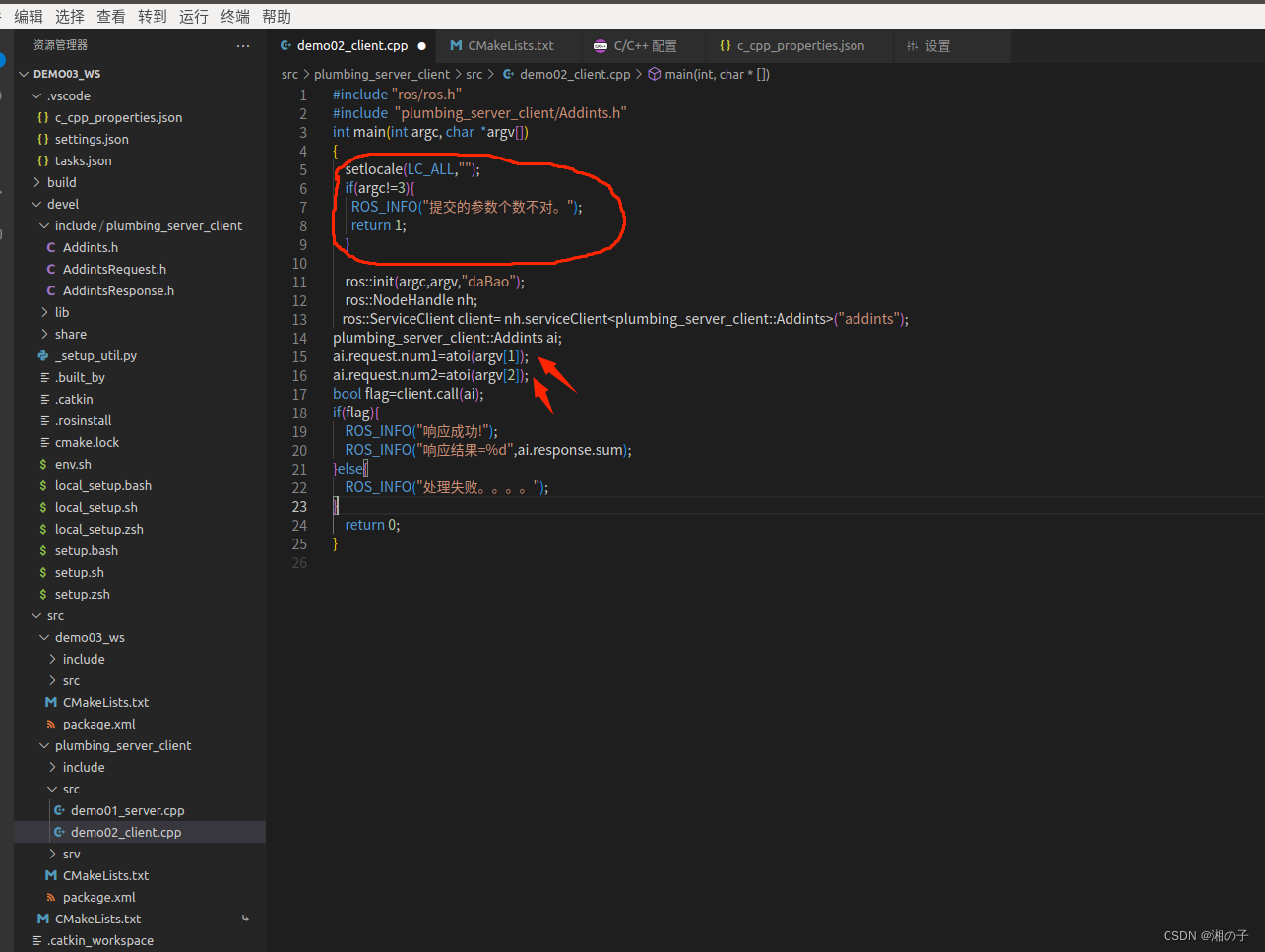
2.客户端

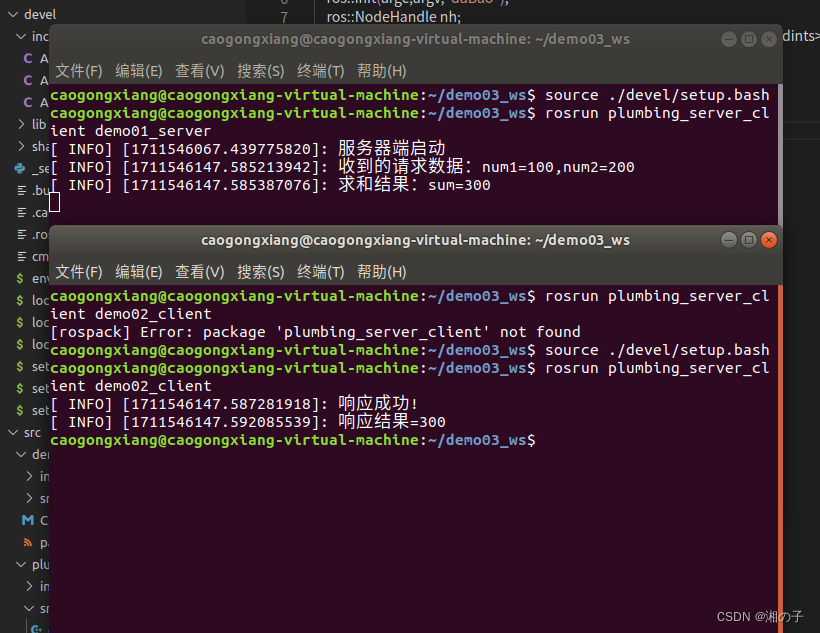
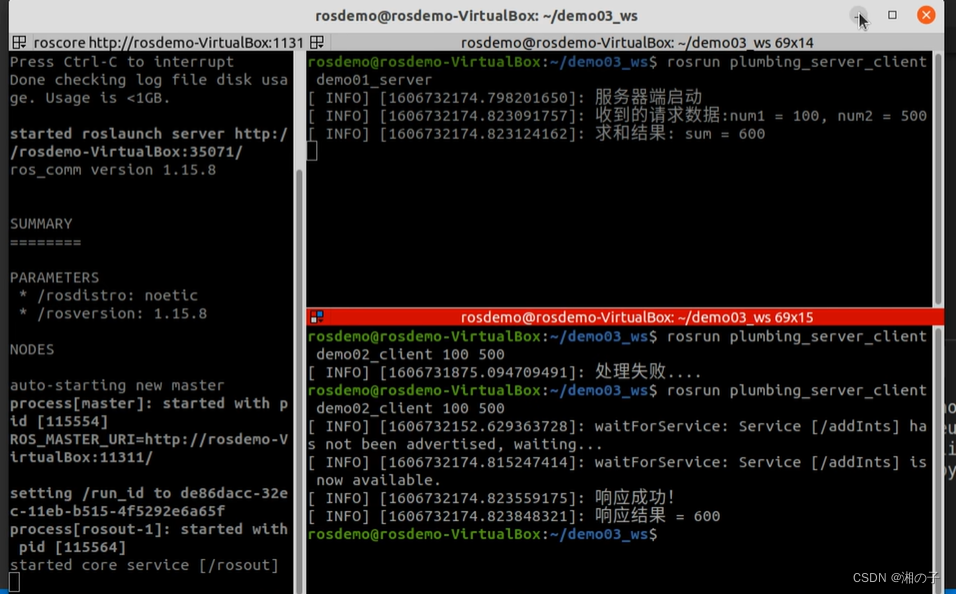
实现参数的动态提交
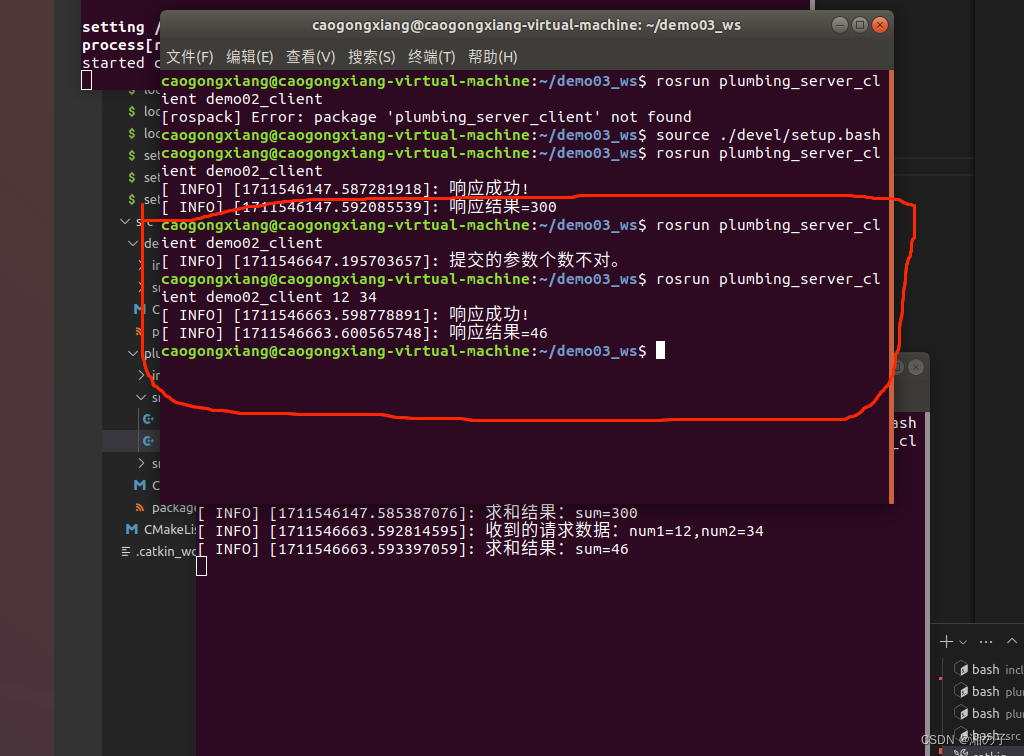
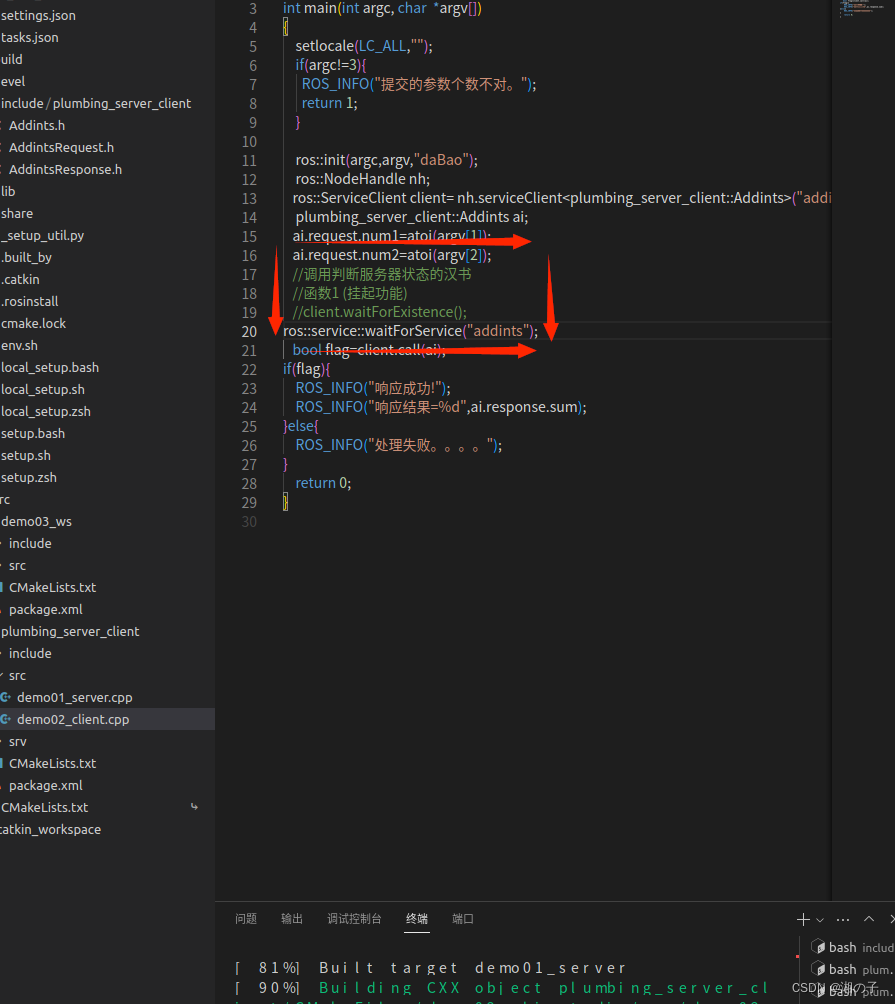
问题:如果先启动客户端,那么会请求异常
需求:如果先启动客户端,不要直接抛出异常,而是挂起,等服务器启动后,再正常请求
解决:在ROS中内置了相关函数,这些函数可以让客户端启动后挂起,等待服务器启动

2.2服务通信
2.2.1服务通信理论模型
2.2.2服务通信自定义srv
后续调用相关msg时,是从这些中间文件调用的
2.2.3服务通信自定义srv调用A(c++)
1.服务端
2.客户端
实现参数的动态提交
问题:如果先启动客户端,那么会请求异常
需求:如果先启动客户端,不要直接抛出异常,而是挂起,等服务器启动后,再正常请求
解决:在ROS中内置了相关函数,这些函数可以让客户端启动后挂起,等待服务器启动
 5913
3492
410
570
5913
3492
410
570











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























