






特征匹配是实现目标检测、图像配准、三维重建等CV任务的关键技术。它能够识别并匹配不同图像中的相似特征,从而确定图像间的对应关系,帮助我们更高效地处理图像数据,提高匹配的准确性。
但是其也面临诸多挑战:像是图像中的噪声、遮挡、形变等。因而对其的改进成为了迫切需求,在CVPR、ECCV、NeurIps等顶会都有不少成果。比如预测误差直降400%的VP2P-Match、性能提升280%的RCM……
为让大家能够紧跟领域前沿。找到更多idea启发,我给大家准备了10种创新思路,原文和源码都有,一起来看!
论文原文+开源代码需要的同学看文末
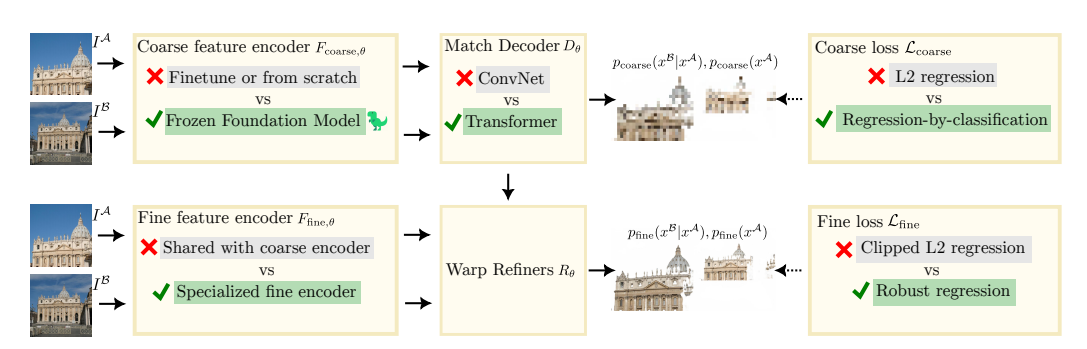
论文:RoMa: Robust Dense Feature Matching
内容
该论文介绍了一种名为RoMa的鲁棒密集特征匹配模型,它能够在尺度、光照、视点和纹理等现实世界变化下进行鲁棒匹配,该模型利用了DINOv2基础模型的冻结预训练特征,并结合了专门的卷积神经网络(ConvNet)细粒度特征,创建了一个精确可定位的特征金字塔,此外,论文还提出了一种改进的损失函数,通过分类回归和鲁棒回归的组合来提高匹配的准确性。
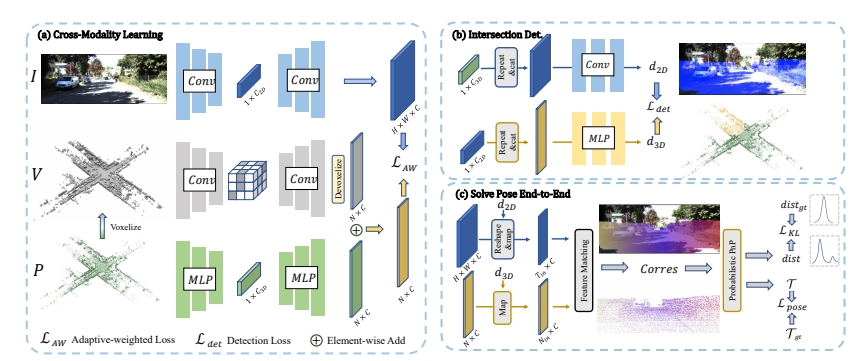
论文:Differentiable Registration of Images and LiDAR Point Clouds with VoxelPoint-to-Pixel Matching
内容
该论文提出了一种名为VoxelPoint-to-Pixel Matching的新框架,用于学习2D图像和3D激光雷达点云之间的结构化跨模态潜在空间,以实现鲁棒的2D-3D特征匹配。该方法通过设计一个三元网络来学习体素点到像素的匹配,其中3D元素用体素和点的组合来表示,而2D元素则用像素表示。
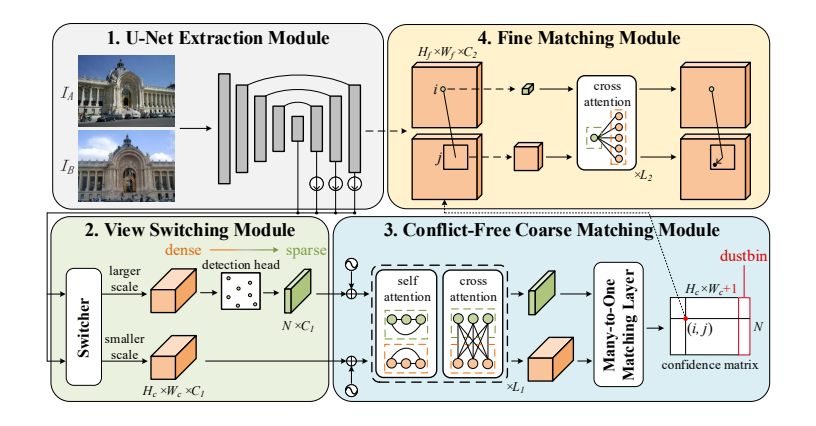
论文:Raising the Ceiling: Conflict-Free Local Feature Matching with Dynamic View Switching
内容
该论文介绍了一种名为RCM(Raising the Ceiling: Conflict-Free Local Feature Matching with Dynamic View Switching)的新型特征匹配方法,旨在提高在大规模变化场景下的特征匹配性能。RCM通过动态视图切换机制和无冲突的粗匹配模块,显著增加了源图像中的可匹配点数量,并在目标图像中实现了无冲突匹配,从而将特征匹配的理论上限提高了260%。
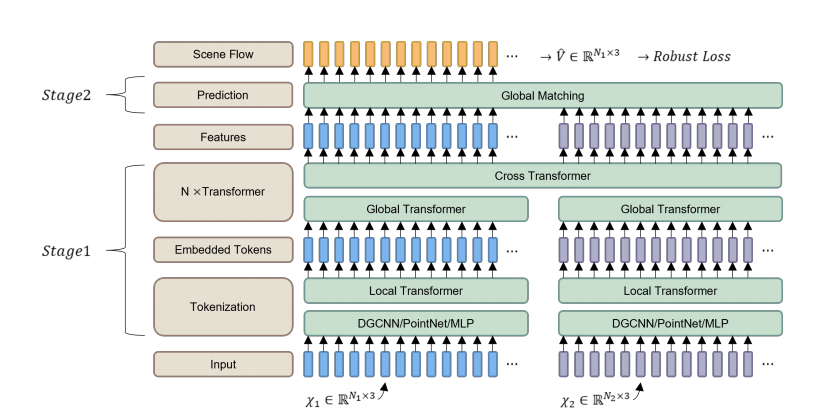
论文:GMSF:Global Matching Scene Flow
内容
该论文介绍了一种名为GMSF(Global Matching Scene Flow)的新方法,用于从点云估计场景流。该方法提出了一种简化的单尺度一次性全局匹配方法,通过可靠的点对特征相似性来准确估计场景流,在多个场景流估计基准测试中,GMSF展现了新的最佳性能。
关注下方《人工智能学起来》
回复“匹配创新”获取全部论文+开源代码
码字不易,欢迎大家点赞评论收藏

















 1952
1952

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









