






自动驾驶Prescan 和simulink 联合仿真LDW模型,车道偏离预警
YID:1829648668708403
智驾小崔
自动驾驶技术作为当下热门的研究领域之一,吸引了全球众多科技公司和学术机构的关注和投入。为了实现车辆自主感知和决策,仿真技术成为了自动驾驶研究中不可或缺的工具之一。在仿真技术的帮助下,开发人员能够在虚拟环境中对自动驾驶系统进行全面、快速和安全的测试验证,以提高技术的可靠性和鲁棒性。
在自动驾驶仿真中,Prescan和Simulink是两个常用的工具。Prescan是一款基于物理的车辆仿真软件,可以模拟车辆在不同路况和环境下的行为。Simulink则是一种用于建立、模拟和分析动态系统的集成环境。通过Prescan和Simulink的联合使用,开发人员可以更加全面地评估自动驾驶车辆的行为和性能,并提前发现潜在的安全问题。
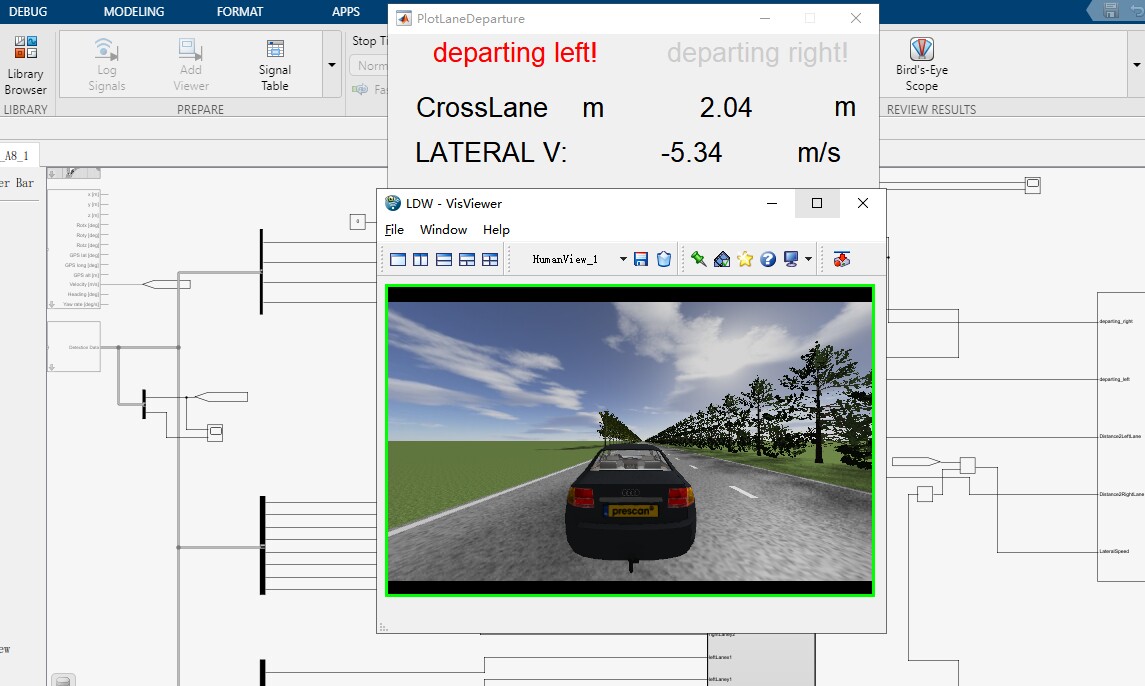
在自动驾驶中,车道偏离是一种常见的行驶状态,可能导致交通事故的发生。因此,车道偏离预警系统是自动驾驶技术中一个重要的研究方向。通过使用Prescan和Simulink进行联合仿真,可以有效地测试和优化车道偏离预警系统的性能。
在联合仿真中,首先需要建立Prescan中的车辆模型,并确定车辆的初始状态和运动轨迹。然后,将车辆模型与Simulink中的LDW(Lane Departure Warning)模型进行耦合。LDW模型可以实时监测车辆的行驶状态,并基于车辆的位置和姿态信息来判断是否存在车道偏离的风险。
通过联合仿真,开发人员可以模拟不同路况下的车道偏离情况,例如直线行驶、曲线行驶、车道变窄等,以评估车辆的行为和LDW模型的预警性能。同时,还可以对LDW模型的参数进行调整和优化,以提高预警的准确性和及时性。
除了车道偏离预警系统的仿真验证,Prescan和Simulink的联合使用还可以在更广泛的自动驾驶研究中发挥重要作用。例如,可以通过仿真评估自动驾驶车辆在复杂交通环境中的行为和决策;可以模拟不同传感器的性能和精度,以选择最合适的传感器组合;还可以进行仿真测试自动驾驶系统的鲁棒性和容错性等。
总之,通过Prescan和Simulink的联合仿真,我们能够更加全面地评估自动驾驶车辆的行为和性能,以及各种驾驶预警系统的效果。这种联合仿真的方法不仅可以提高自动驾驶技术的可靠性和安全性,同时也能够加速自动驾驶技术的研发和应用进程。
相关的代码,程序地址如下:http://coupd.cn/648668708403.html


















 7784
7784

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









