






 本文详细解析了北航专家关于多旋翼飞行器设计与控制中的遥控器输入模式,包括自稳模式下的角度和油门控制,定高模式的垂直运动控制,以及定点模式下的精确位置控制。
本文详细解析了北航专家关于多旋翼飞行器设计与控制中的遥控器输入模式,包括自稳模式下的角度和油门控制,定高模式的垂直运动控制,以及定点模式下的精确位置控制。
参照 北航全权老师的《多旋翼飞行器设计与控制实践》
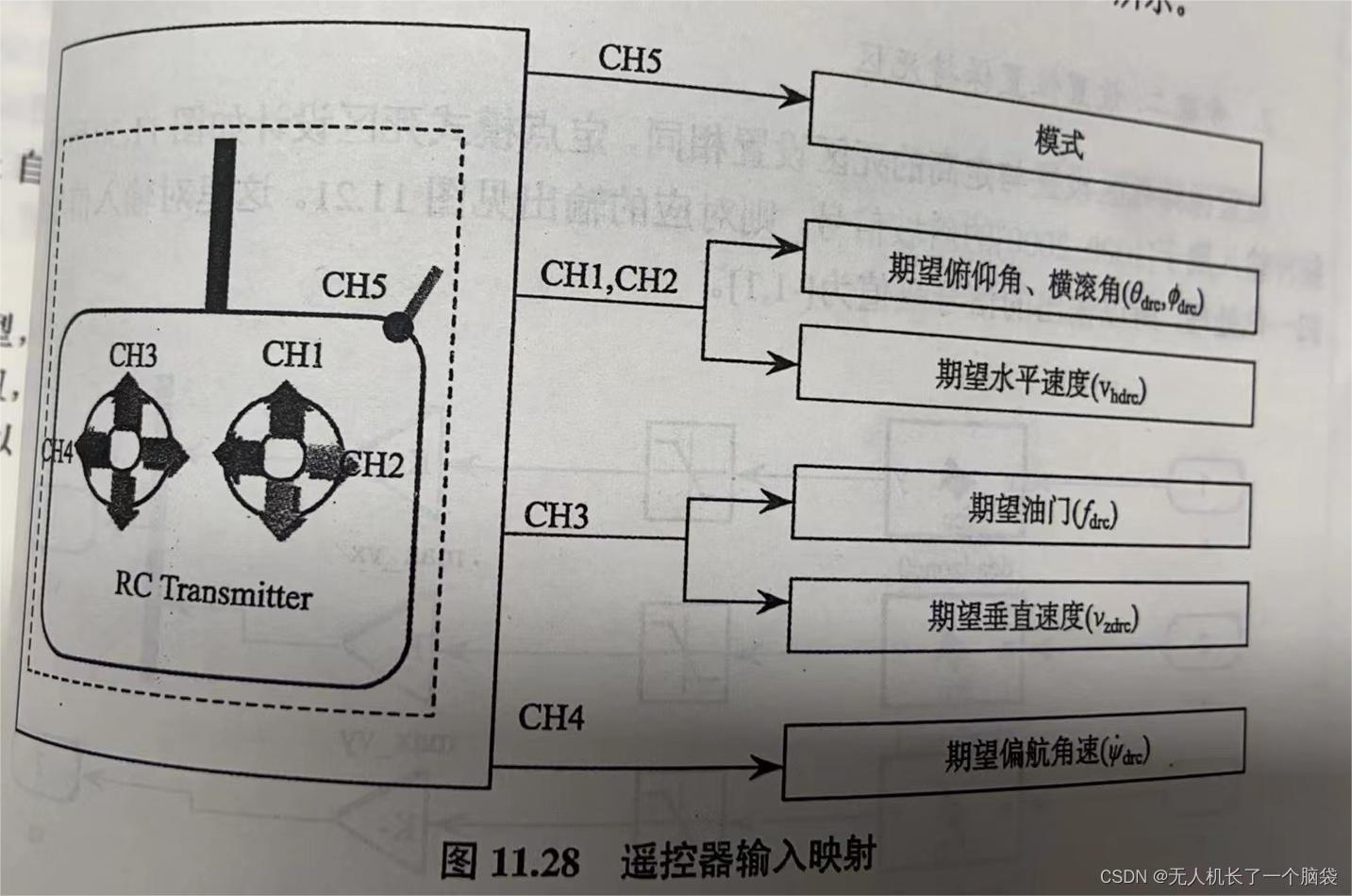
 遥控器输入中一般有 自稳(姿态)、定高、定点(位置)三种模式,通过拨动ch5通道选择
遥控器输入中一般有 自稳(姿态)、定高、定点(位置)三种模式,通过拨动ch5通道选择
其中自稳模式:ch1:期望俯仰角,ch2:期望滚转角,ch3:期望油门,ch4:偏航角速度;
定高模式:ch1:期望俯仰角,ch2:期望滚转角,ch3:z向期望速度,ch4:偏航角速度;
定点模式:ch1:x向期望速度,ch2:y向期望速度,ch3:z向期望速度,ch4:偏航角速度;
参照 北航全权老师的《多旋翼飞行器设计与控制实践》
遥控器输入中一般有 自稳(姿态)、定高、定点(位置)三种模式,通过拨动ch5通道选择
其中自稳模式:ch1:期望俯仰角,ch2:期望滚转角,ch3:期望油门,ch4:偏航角速度;
定高模式:ch1:期望俯仰角,ch2:期望滚转角,ch3:z向期望速度,ch4:偏航角速度;
定点模式:ch1:x向期望速度,ch2:y向期望速度,ch3:z向期望速度,ch4:偏航角速度;
 1046
1046

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























