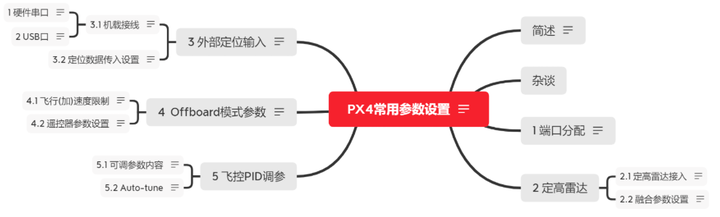
 全面指南:PX4无人机QGC关键参数设置与调试,
全面指南:PX4无人机QGC关键参数设置与调试,




简述
此文将全面介绍涉及激光定高雷达设置、串口端口设置(机载电脑)、视觉定位设置、Offboard模式下的飞行速度限制、offboard模式下遥控器参数设置(确保飞行安全)、PID调参等内容。需知,此文提及的参数设置仅适用于PX4 v1.13.3及之前的固件版本,最新的固件v1.14.0改动比较大,许多参数名称都进行了调整(v1.14.0目前似乎不太稳定,暂时不建议使用)。通俗一些,此文将解答如下相关内容(纯小白角度出发,大佬轻喷):
-
1)PX4飞控那么多端口,都分别是连接什么传感器的呢?激光定高雷达接哪里,该修改什么参数?GPS接哪里,RTK接哪里?
-
2)外部定位数据怎么传输给PX4飞控?机载电脑和PX4飞控怎么连接,连接时使用USB转TTL模块的接线方案是?不使用USB转TTL模块的接线方案是?
-
3)Offboard模式下能否给无人机限速?最大水平or垂直速度(加速度)、起降速度(加速度)
-
4)正常切入offboard模式必须开启遥控器,能否将必须开遥控器的条件取消掉?
-
5)offboard模式下飞行时,遇到危险时总是来不及切出offboard模式,只能emergency kill炸鸡——能否遥控器输出变化超过一定范围,自动切出offboard模式?
-
6)飞控的PID有哪些参数需要调节?这些参数都影响什么样的控制响应效果?能否让飞控自行进行参数调节(auto-tune)?
完整内容
对PX4中重要参数进行详细介绍的完整内容需前文微信阅读【Poao】,链接如下:
 https://mp.weixin.qq.com/s/wM4iJCgNgKIUfloqtHSoug
https://mp.weixin.qq.com/s/wM4iJCgNgKIUfloqtHSoug杂谈
不少内容在以往文章里面都提及过,只不过内容比较散。为此,此文将相对系统、相对完整的介绍诸多参数。文中提及的参数设置是鄙人耗费大量时间搜罗测试摸索到的经验,文章也是耗时不少认真整理出来的,所以此文部分内容也将付费,文中的诸多内容将结合具体的实物进行讲解。
相关的以往文章参考:
-
Pixhawk 飞控接口线序图 & 常用传感器连接设置(QGC) ~ 此文文末简单介绍了Ardupilot固件下常用的工作模式及速度参数设置
一些不错的PX4知识参考网站:
-
阿木实验室关于PX4参数简述:PX4参数大纲 - Prometheus使用手册
1 端口分配
关于常用的传感器具体都是些什么,这里不会具体展开介绍,b站上面已经有大量的视频讲解了,参考如下链接:
-
【低成本DIY】自主ROS无人机-1. 课程及功能介绍 ~ 参考了fast-lab的课程
-
【超维空间科技】: ROS+PX4无人机全开源系列教程专栏 ~ 这个UP主分享了很多关于PX4的内容,虽然我没咋看过(知道得晚了)
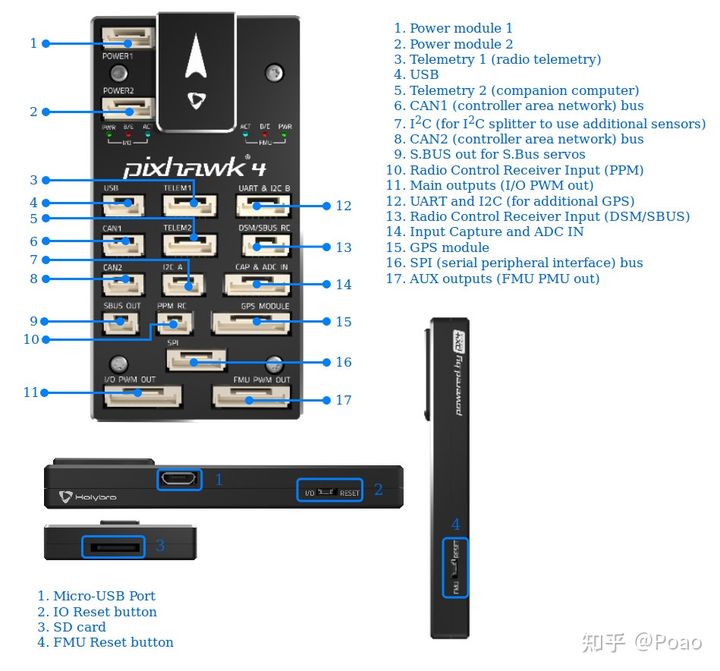
此处以常用的Pixhawk4为例,简单介绍各个端口的用处。PX4飞控常搭载的模块包括:GPS(或RTK)、定高雷达、数传、机载电脑、遥控器接收机等,不同模块接入的端口也都相对固定。这里特别针对串口提一嘴:目前市面上的飞控一般都有3个硬件串口接口,前两个硬件串口名称都是统一命名为TELEM1和TELEM2,后面一个硬件串口名称则可能为UART或TELEM4。Pixhawk4中叫【UART&I2C】端口,在雷迅飞控中则命名为【UART4】。
-
GPS(或RTK)~ 提供绝对定位数据: 连接飞控的 GPS Module 或者 CANx 端口,连接后默认无需进行参数设置。
-
定高雷达 ~ 提供高度估计数据:不同品牌的定高雷达连接的端口各不相同,需要在QGC里面设置的参数也是如此,一般使用 I2C端口 或者 UART端口(TELEM*都可以)。
-
数传 ~ 与飞控进行无线通讯:不管是wifi数传还是正经数传,一般默认连接TELEM1,波特率默认57600,当然也可以选择连接TELEM2。
-
机载电脑 ~ 与飞控进行有线通讯:机载电脑与飞控主要是进行串口通信,一般默认使用TELEM2,当然也可以使用TELEM1、下图的USB(4)。为了保证机载电脑和飞控之间的通讯延时低一点,波特率默认使用921600,不建议使用115200。
-
遥控器接收机 : 根据接收机协议,选择合适的RC端口。
2 定高雷达
2.1 定高雷达接入
如前所述,定高雷达的接口为I2C或者UART端口,此外还需要根据雷达品牌对应修改QGC里面的参数。我目前使用过三种定高雷达,即LIDAR LITE V3激光雷达、北醒系列激光雷达(TFmini,TF02pro...)、乐迪超声波定高雷达,此处简述这三种雷达的接口及QGC参数设置。对于硬件接线,I2C的信号线为SDA&SCL,定高雷达接口和飞控接口SDA-SDA,SCL-SCL,一一对应连线;UART的信号线为TX&RX,定高雷达接口和飞控接口TX-RX,RX-TX,交叉连线。
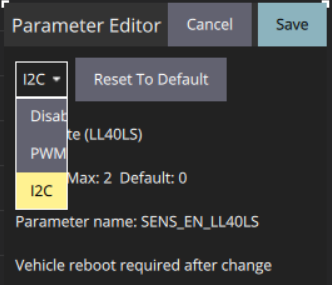
(1)LIDAR LITE V3激光雷达: 一般接入I2C接口(Pixhawk4的端口7),接入UART&I2C(端口12)也可以。

# QGC 参数 SENS_EN_LL40LS 设置为I2C
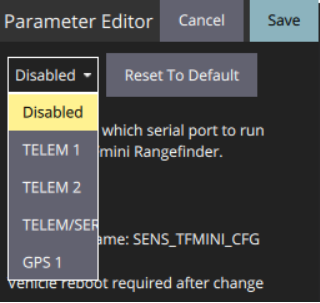
(2)北醒系列激光雷达:购买时可以选择I2C或者UART两种协议,PX4固件请选择UART! 一般将激光雷达接入串口4,即UART&I2C(端口12,Pixhawk) 或者 TELEM4(雷迅飞控),北醒系列的激光雷达设置操作都是相同的。
# QGC 参数 SENS_TFMINI_CFG 设置为 TELEM4 或者 GPS2(X7+, v1.13.3)
(3)乐迪超声波定高雷达:一般接入I2C接口,接线同LIDAR LITE V3激光雷达。需要注意的是,这款激光定高雷达的工作原理是超声波测距,而非上述的激光定高。该款模块更多的用于避障,因为他的FOV角约60度,而前面提及的激光定高雷达FOV基本都是5度以内。
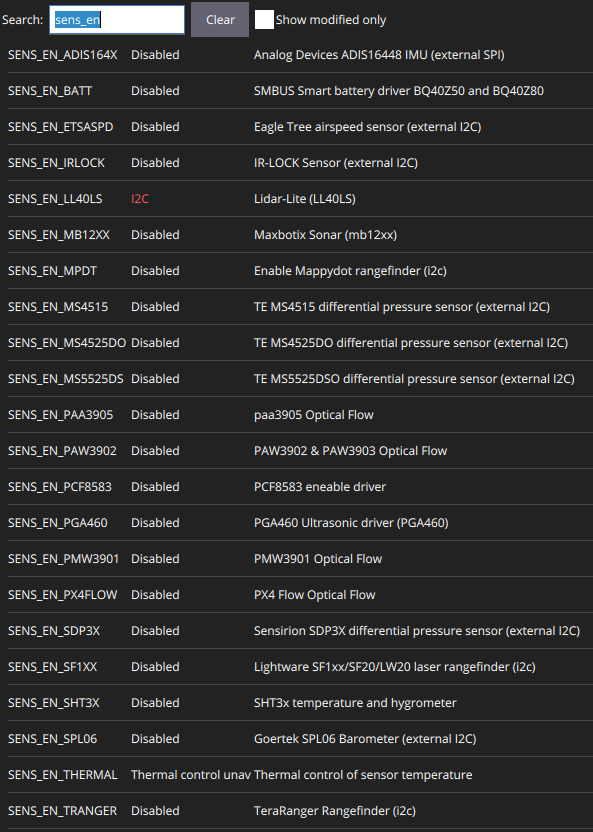
# QGC 参数 SENS_EN_MB12XX 设置为 Enabled
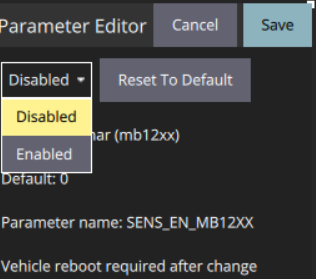
题外话,PX4官方的很多传感器使能参数都是【SENS_EN_XXX】:
2.2 融合参数设置
经过上述操作使得飞控成功获取到定高雷达的数据后,我们便可以直接在 QGC的【Analyze Tools -> MAVLink Inspector】下查看激光定高雷达的实时测量数据【DISTANCE_SENSOR】。
~~~~~~ 分割线 ~~~~~~
后续内容
前文提及的一些链接中也有部分参数的讲解,不过针对性不够强,也并未对重要参数进行详细介绍。而经验积累及内容整理不易,后续内容付费(10RMB),需前文微信阅读【Poao】,链接如下:


















 7682
7682

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









