






作者 | 笑看雾里 编辑 | 汽车人
原文链接:https://www.zhihu.com/question/473480923/answer/3206057022
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【规划控制】技术交流群
本文只做学术分享,如有侵权,联系删文
论文:B. Zhou, F. Gao, L. Wang, C. Liu and S. Shen, “Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight,” in IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3529-3536, Oct. 2019, doi: 10.1109/LRA.2019.2927938.
文章的模块组成可分成以下几个部分:
包括了前端 kinodynamic a_star 路径搜索(在控制空间进行motion primitive)以及基于帕特利亚金最小值原理的两点边界值问题求解(解决控制空间稀疏采样无法抵达目标点的问题-在状态空间进行motion primitive)。
后端首先利用 均匀B样条曲线 对前端得到的路径进行拟合,之后基于距离场地图( SDF )对轨迹平滑性(纯几何性质,不是控制的Norm的时间积分,因为之后还要对时间进行调整),离障碍物距离,速度加速度超限等进行软约束优化。
得到优化的轨迹过后,使用 非均匀B样条曲线 对轨迹进行表达,然后对每一段超过速度,加速度上界的曲线进行时间节点的迭代调整,直到该段曲线的速度加速度符合约束。
一. kinodynamic a_star(前端hybrid A_star动力学路径搜索)
主要对应的是Fast planner->path ->path_searching->kinodynamic a_star.cpp。路径搜索的主要函数为kinodynamicAstar类的search函数,我们从这一函数开始阅读并逐一分析其中的重要函数: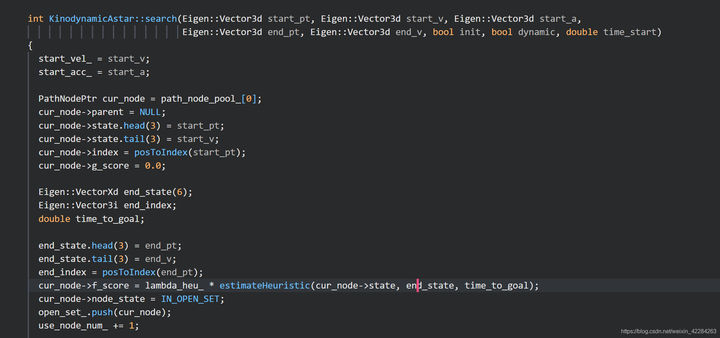 search函数的参数包含起始点以及重点的位置,速度,加速度。以及两个标志位init 和dynamic,还有一个搜索起始时间。上图代码中主要是将起始点及目标点的三维位置转化至栅格地图的index. 并计算第一个扩展点的Heuristic cost.
search函数的参数包含起始点以及重点的位置,速度,加速度。以及两个标志位init 和dynamic,还有一个搜索起始时间。上图代码中主要是将起始点及目标点的三维位置转化至栅格地图的index. 并计算第一个扩展点的Heuristic cost.
1.1启发函数的计算
estimateHeuristic()是第一个重要的函数,对应文章中的III.B小节,主要原理是利用庞特里亚金原理解决两点边值问题,得到最优解后用最优解的控制代价作为启发函数。
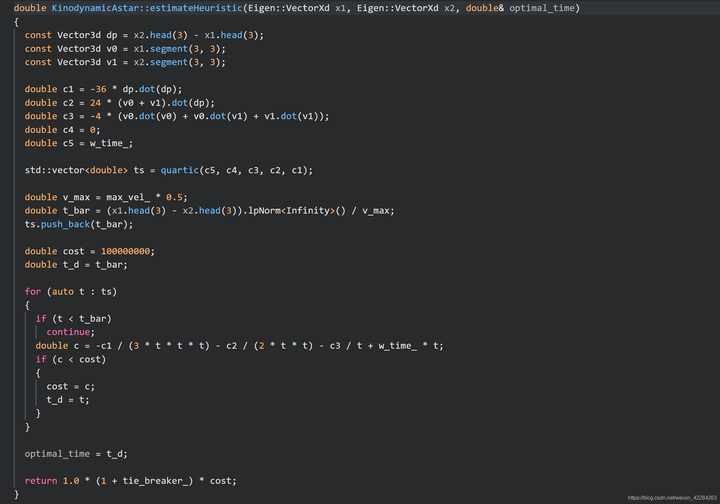 首先通过设置启发函数对时间求导等于0,得到启发函数关于时间T的四次方程,再通过求解该四次方程,得到一系列实根,通过比较这些实根所对应的cost大小,得到最优时间。这里需要注意,关于时间的一元四次方程是通过费拉里方法求解的,需要嵌套一个元三次方程进行求解,也就是代码中应的cubic()函数。
首先通过设置启发函数对时间求导等于0,得到启发函数关于时间T的四次方程,再通过求解该四次方程,得到一系列实根,通过比较这些实根所对应的cost大小,得到最优时间。这里需要注意,关于时间的一元四次方程是通过费拉里方法求解的,需要嵌套一个元三次方程进行求解,也就是代码中应的cubic()函数。
一元四次方程的求解过程参见wikipedia中的费拉里方法:
zh.wikipedia.org/wiki/%E5%9B%9B%E6%AC%A1%E6%96%B9%E7%A8%8B
一元三次方程的求见过程参见wikipedia中的求根系数法。需要加以说明的是,代码中的判别式大于0及等于0的情况利用了求根公式,判别式小于0的情况则是使用了三角函数解法:
zh.wikipedia.org/wiki/%E4%B8%89%E6%AC%A1%E6%96%B9%E7%A8%8B
1.2 Compute shot Traj
计算出起始节点的启发项后,就基本进入搜索循环,第一步是判断当前节点是否超出horizon或是离终点较近了,并计算一条直达曲线,检查这条曲线上是否存在。若存在,则搜索完成,返回路径点即可。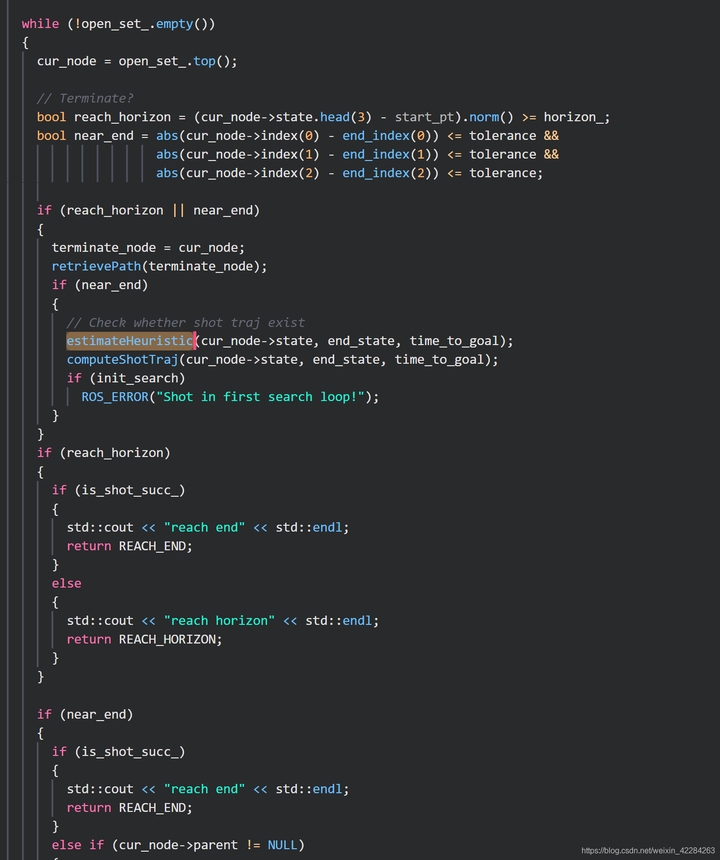 这里我们遇到了第二个重要的函数ComputeShotTraj. 即利用庞特里亚金原理解一个两点边值问题。因为最优控制时间已经在estimateHeuristic中计算过了,所以这里只要引入该时间进行多项式计算即可。这部分的目的是为了验证该轨迹是安全的,即不发生碰撞,速度、加速度不超限。
这里我们遇到了第二个重要的函数ComputeShotTraj. 即利用庞特里亚金原理解一个两点边值问题。因为最优控制时间已经在estimateHeuristic中计算过了,所以这里只要引入该时间进行多项式计算即可。这部分的目的是为了验证该轨迹是安全的,即不发生碰撞,速度、加速度不超限。
1.3 节点扩张
以上代码search()中,在当前节点的基础上,根据对输入、时间的离散进行扩展得到tmp临时节点,首先判断节点是否已经被扩展过,是否与当前节点在同一个节点,检查速度约束,检查碰撞,都通过的话,就计算当前节点的g_score以及f_score. 其中的state transit函数即通过前向积分得到扩展节点的位置和速度。接下来,就要进行节点剪枝。
1.4 节点剪枝
首先判断当前临时扩展节点与current node的其他临时扩展节点是否在同一个voxel中,如果是的话,就要进行剪枝。要判断当前临时扩展节点的fscore是否比同一个voxel的对比fscore小,如果是的话,则更新这一Voxel节点为当前临时扩展节点。
如果不剪枝的话,则首先判断当前临时扩展节点pro_node是否出现在open集中,如果是不是的话,则可以直接将pro_node加入open集中。如果存在于open集但还未扩展的话,则比较当前临时扩展节点与对应VOXEL节点的fscore,若更小,则更新voxel中的节点。
需要进行说明的是,在Fast planner的实现中,open集是通过两个数据结构实现的,一个队列用来存储,弹出open集中的节点。另一个哈希表NodeHashtable 用来查询节点是否已经存在于open集中。而判断一个节点是否存在于close set中,则是通过Nodehashtable 与nodestate来决定的,如果nodeState 是 InCloseSet, 且存在于NodeHashtable, 则说明该节点已经被扩展过了,存在于close set中。
1.5 返回kinopath与 getsamples
getKinoTraj这一 函数多作用是在完成路径搜索后按照预设的时间分辨率delta_t通过节点回溯和状态前向积分得到分辨率更高的路径点。如果最后的shot trajectory存在的话,则还要加上最后一段shot trajectory(即通过computeshottraj)算出来得到的。
getSamples这一函数则是离散的获得一些轨迹点以及起始点的速度与加速度。
二、B样条曲线
首先重温一下B样条曲线的几个基本性质
1)一个有N+1个控制点的 Pb次B样条曲线,则其一共有 Pb+N+1时间节点,即 [ t 0 , t 1 , . . . t M ] 。同样的,假定希望设计一条 Pb次B样条曲线,且具备M个时间节点,则相应的控制点数量应为:M+1−Pb
2)这样一条B样条的定义域为 [tPb,tM+1−Pb]
3)每一个控制点 P i P_i Pi的作用域为[ti,ti+pb+1]
4)该B样条曲线的重的一段曲线 [ti,ti+1]只被[Pi−pb,Pi]这 pb+1个控制点影响。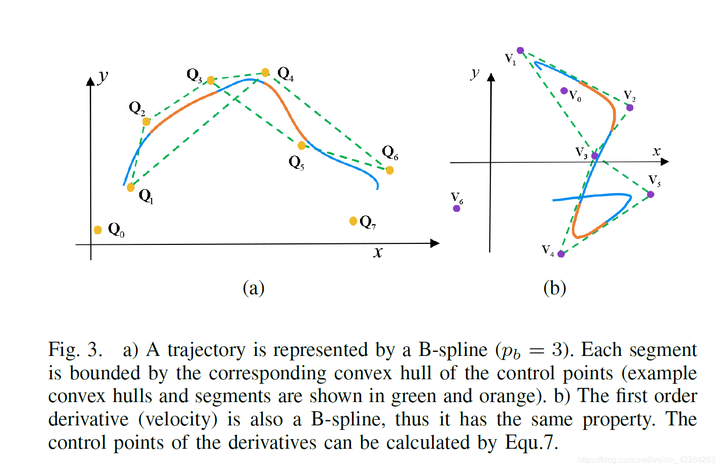
2.1 均匀B样条设置
得到初始路径后,需要在前端初始路径的基础上进行B样条优化。B样条的第一部分是利用均匀B样条进行轨迹平顺性、安全性、速度和加速度优化。在non_uniform_bspline.cpp中,均匀B样条的设置函数为setUniformBspline()。这一函数在获得控制点,轨迹次数,以及时间间隔的情况下,设置时间区间(Knot vector), 需要注意的是,在Fast-planner的实现中, tp=0, 以文章中的3次样条函数为例,t0=−3Δt, t1=−2Δt,t2=−Δt。
2.2 B样条函数值计算
给定一个时间 μ, 如何计算该点的坐标值?通常的做法是根据Cox-DeBoor公式把整个B样条函数计算出来。但在evaluateDeBoor()这一函数中,作者采用的是递归的DeBoor算法,如下图所示,具体参见wikipedia,https://en.wikipedia.org/wiki/De_Boor%27s_algorithm
其中 k 是 x落在的时间区间,即 x∈[tk,tk+1]。 假设原有与此段轨迹相关的P+1个控制点为0阶‘控制点’,通过两个循环计算出第K个P阶的‘控制点’,该点即为要求的B样条函数值。内循环通过递归公式求得高一阶的P+1个控制点,外循环提高阶数。
假设原有与此段轨迹相关的P+1个控制点为0阶‘控制点’,通过两个循环计算出第K个P阶的‘控制点’,该点即为要求的B样条函数值。内循环通过递归公式求得高一阶的P+1个控制点,外循环提高阶数。
2.3 控制点获得-前端路径拟合
通过上面两小节,我们已经能够在已知控制点的情况下计算任一时间对应的轨迹值,那么,控制点要如何获得呢。在Fast-Planner的实现中,初始控制点时通过对前端hybrid A* 寻找到的初始路径进行拟合得到的。
虽然在计算B样条曲线上某一点的值时论文用的是DeBoor公式,但是在使用均匀B样条对前端路径进行拟合时用的是B样条的矩阵表达方法,具体参见论文:K. Qin, “General matrix representations for b-splines,” The Visual Computer, vol. 16, no. 3, pp. 177–186, 2000.
首先假设获得的离散轨迹点一共有K个,则有K-1段轨迹,根据B样条性质,这K-1段3次B样条曲线的定义域是[u3,u3+k−1]。则一共有K+5个knot vector,即 M=K−1+3+3 ,所以应该有M-3即K+2个控制点。
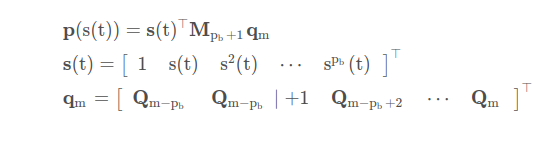
如以下公式所示,对于B样条曲线上定义在 tm,tm+1上的一小段曲线,其被 [pm−pb,pm]这四个控制点所决定。其中 s(t)=(t−tm)/Δt。Mpb是四维常数矩阵,具体参见以上论文链接。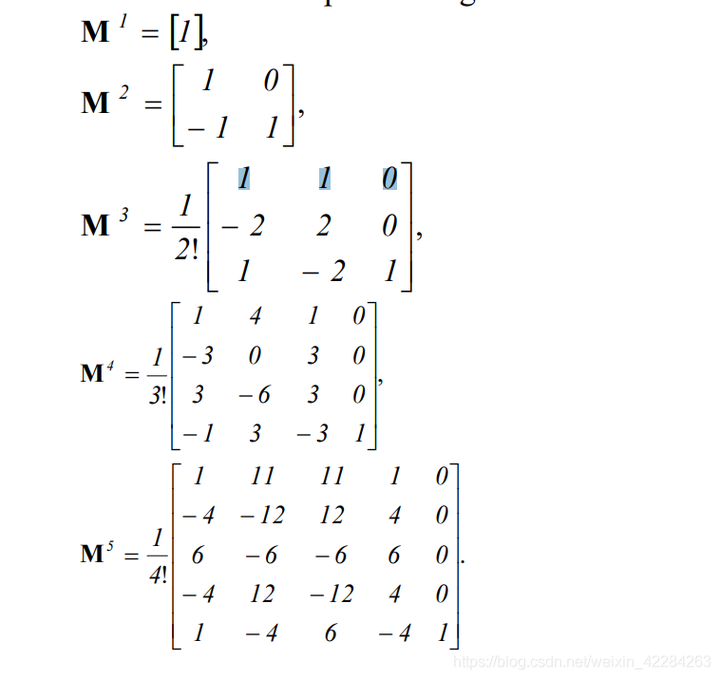
 通过矩阵运算,我们可以得到第一个路径点对应的位置约束:
通过矩阵运算,我们可以得到第一个路径点对应的位置约束:
x 1 =(Q2+4Q1+Q0)/6
同理可得其余K-1个路径点的位置约束。
对于速度约束与加速度约束,只需要对时间 t求一次及二次微分即可,所得约束关系如代码中所示。需要注意的是,由于s(t)是关于t的函数,具有常数项 1 /Δt, 所以一次及二次微分需要乘以对应的常数项 1 /Δt,1/ Δt^2。
通过对K+2个控制点构建K+4个等式约束(K个位置约束,两个速度约束,两个加速度约束),利用Ax=b Ax=b进行线性拟合,即可得到拟合的控制点。
2.4 非均匀B样条一阶及二阶微分
当我们得到一条时间节点等同的均匀B样条曲线后,我们希望能够对这条曲线上的速度及加速度进行动力学检查,以备之后进行时间节点调整。于是我们需要计算出非均匀形式下的速度控制点及加速度控制点。(直接用均匀B样条的控制点算是因为均匀B样条可以看做特殊形式的非均匀B样条) 代码中利用递归的形式求得速度与加速度,B样条的一阶微分是次数-1,控制点数-1的B样条曲线,因此相应的Knot vector-2。 在利用上图公式获得一阶微分控制点后,新定义一个NonUniformBspline对象,并将新的控制点,次数,Knot vector赋值给它。
代码中利用递归的形式求得速度与加速度,B样条的一阶微分是次数-1,控制点数-1的B样条曲线,因此相应的Knot vector-2。 在利用上图公式获得一阶微分控制点后,新定义一个NonUniformBspline对象,并将新的控制点,次数,Knot vector赋值给它。
2.5 可达性检查
这一部分的三个函数 checkFeasibility(), checkRatio(), reallocateTime()的大部分内容都是一致的。都是利用如下两个公式计算每个控制点的速度和加速度是否超限,最大速度是多少,并获得调整比例。
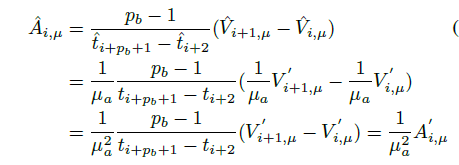 真正进行重新时间调整的函数时reallocateTime,通过计算当前控制点是否超限,以及调整表比例。对于当前控制点i有关的时间区间进行时间调整, [ti,ti+pb+1]。注意,这里的 pb是当前B样条的次数,如果是速度则是3-1=2, 加速度则是3-2=1(针对论文中的3次B样条曲线而言)。在 ti+pb+1以后的是时间节点则是直接加上总的扩张时间就可以。
真正进行重新时间调整的函数时reallocateTime,通过计算当前控制点是否超限,以及调整表比例。对于当前控制点i有关的时间区间进行时间调整, [ti,ti+pb+1]。注意,这里的 pb是当前B样条的次数,如果是速度则是3-1=2, 加速度则是3-2=1(针对论文中的3次B样条曲线而言)。在 ti+pb+1以后的是时间节点则是直接加上总的扩张时间就可以。
三、B样条优化
3.1 优化项计算
利用均匀B样条进行优化,首先要看三部分的优化项及相应梯度是如何表达的。三项优化项分别是jerk平顺项,障碍物距离项,以及速度、加速度可达项。
其中,平顺项,速度、加速度项都是利用均匀B样条的微分公式,求出速度控制点,加速度控制点,jerk控制点,从而构造与相应控制点相关的优化项。梯度则是利用链式法则,用cost对影响这一cost的控制点求导,然后在循环中对cost及各控制点梯度进行累加(一个控制点会影响多个控制点的优化项)。
这里需要注意的是,速度与加速度的优化项及梯度都考虑了时间项 Δ t \Delta t Δt,但jerk项省略了时间项-或许对应文中说的后续纯几何构造法,便于后续进行时间调整。但是,平顺项的实现方式与原论文中的elastic band的方法也是不一样的。
至于障碍物项。控制点距离最近障碍物的距离及这一距离关于控制点的梯度是通过SDF地图实现的。

3.2 优化项结合
因为在KinoReplan中只用到Smoothness, distance,以及feasibility这三项优化项,因此,其余的优化项计算我们暂且不谈。现在考虑如何将这几项优化项结合起来,并将其自变量从控制点转化为Nlopt优化的变量x。
结合三种优化项的函数是combineCost()函数,函数有三个参数,第一个std::vector& x即是Nlopt优化的变量,应该与三个维度的控制点对应。第二个参数是std::vector& grad,即总的优化项关于每个优化变量的梯度信息。第三个参数是double& f_combine 。即结合后的Cost。
首先是给g_q赋值,g_q是用来计算每次优化循环三个优化项的控制点。值得注意的是,前 p b p_b pb个控制点和最后 p b p_b pb个控制点是不进行优化的,始终保持线性拟合得到控制点原值。中间的控制点则是因为每一次迭代优化后都不同,因此用x来赋值。这里的x是通过Nlopt的opt 对象在set_min_objective中进行初始化的,具体的大小在构造 Nlopt optimizer对象时就通过variable_num的大小确定了。而初始值则是在Nlopt求解时 .optimize函数中进行赋值。
接下来就是利用CalcSmoothneesCost, CalcDistanceCost, CalcFeasibilityCost 三个函数计算每一部分的cost和grad,并乘上权重后累加至grad 和 f_combine中,唯一需要注意的是grad和各部分优化项梯度之间维度上差了两个B样条次数。
最后,构建符合Nlopt要求的目标函数,即costFunction函数,该函数通过combinecost返回总的cost,并在参数中提供梯度信息。
3.3 Nlopt优化
至此,我们已经构造完成了优化变量、目标函数、梯度信息,接下来,我们就可以通过Nlopt对控制点进行非线性优化。
首先是BsplineOptimizeTraj()函数,将优化的控制点,均匀B样条的时间间隔,cost Function包含的优化项,以及终止条件(最大优化次数及最长优化时间)都设置好以后,就利用BsplineOptimizer的optimize()函数进行优化。
BsplineOptimizer的optimize()函数首先根据pt_num确定各部分优化项梯度vector的大小,然后再根据是否有终值点约束确定优化变量的个数。
接下来就是实例化Nlopt::opt类对象 opt。并设定目标函数。设定最大优化次数与最长优化时间,设定目标函数的最小值(这三者都是设定终止条件)。接着,根据线性你和得到的控制点设置优化变量的初值,并设置每个优化变量的上下界(初始值±10)。
最后利用Nlopt::opt类对行opt的optimize函数进行迭代优化求解,在求解结束后,通过costFunction中保留的best_Variable对control_point进行赋值。
原文链接:
blog.csdn.net/weixin_42284263/article/details/119204964
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!


















 2373
2373

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









