






作者 | 黄奇浩 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/681075174
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【3D目标检测】技术交流群
本文只做学术分享,如有侵权,联系删文
受 王峰:远距离LiDAR感知 启发,作为实打实的 L2+ RoboTruck 同行 ,我也来分享分享 智加/Plus 在远距离感知上的一些积累,作为工作一段时间的总结。
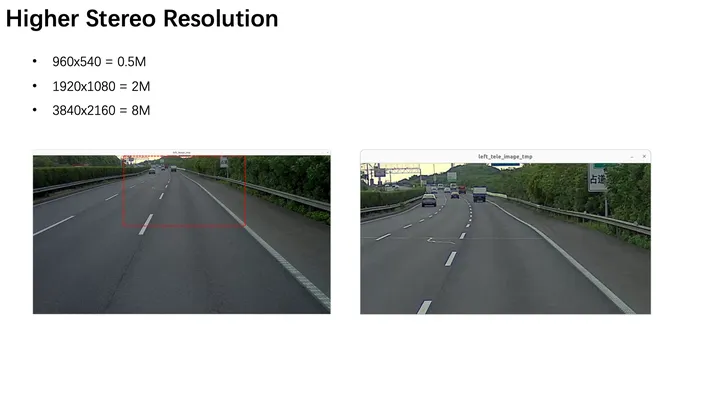
既然特斯拉、百度/极越已经在一定规模下证明了纯视觉 L2+ (highway/city, FSD) 的可行性,那为什么还要去研究双目呢?双目、LiDAR 相较于 2M 的 30/60/120 和 8M 的 30/120 的区别是什么?我的看法是:
在线:在数据规模有限的情况下,双目和 LiDAR 一样,能快速提升感知性能上限;
离线:可用于 auto-label 中的预标注、建图;
成本:相较于 LiDAR,在成本上有显著优势;
标定:前向标定在流程上也会更简单;
架构:双目硬同步 (vision-centeric),来触发、对齐其他相机,相较于 LiDAR-centeric 更精准。
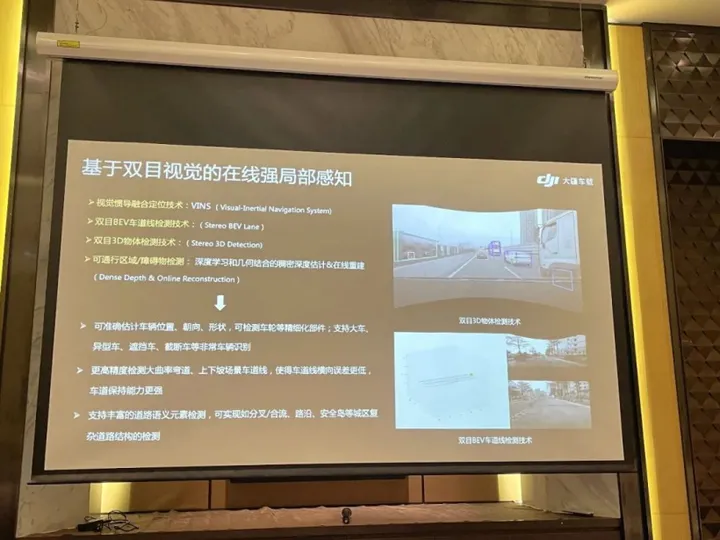
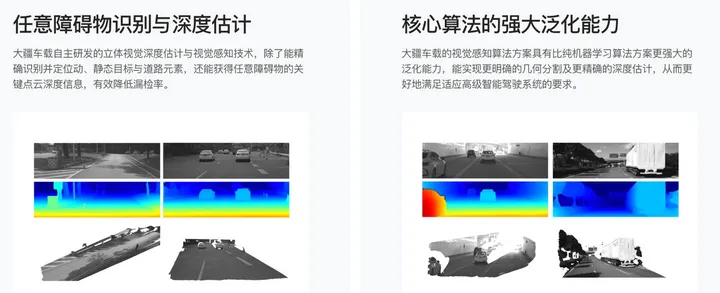
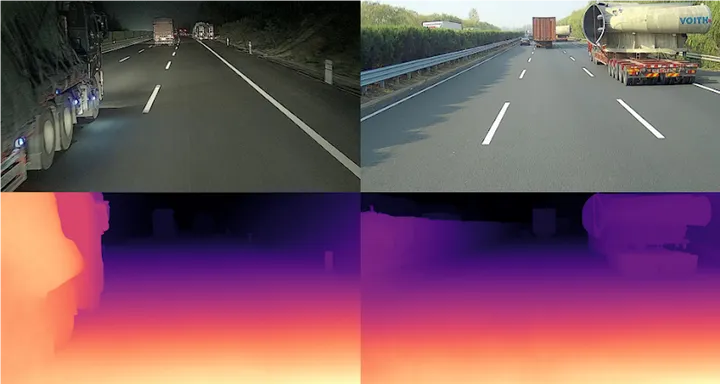
我们的效果和大疆、鉴智释放的图片、视频一样,可以实现稠密、准确的深度估计。但是很可惜,基于 DL-Stereo 的方法需要稠密的深度 GT,而现在的 LiDAR 往往只能提供 150m 内的 GT. Livox Tele 的 FoV 较小,超远处的反射率和点数不足以支撑我们的需求和场景。最终在远距离使用的,还是基于传统特征的稠密/稀疏匹配。
不同于现在流行的前向单目、三目、长短焦双目,同构双目的玩家其实并不多。乘用车领域,国内做得最好的应该是大疆、鉴智,国外是维宁尔、奔驰。我先来分享分享他们的进展和优势。
玩家们
大疆
在宝骏的一系列产品中交付:云朵、KiWi、悦也的高配版本,能够实现城区记忆行车。
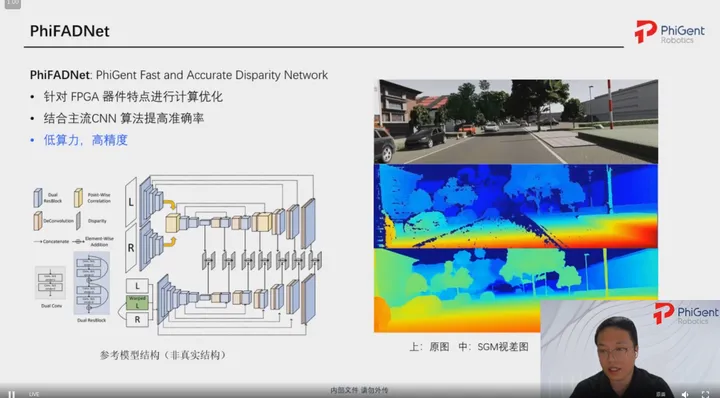
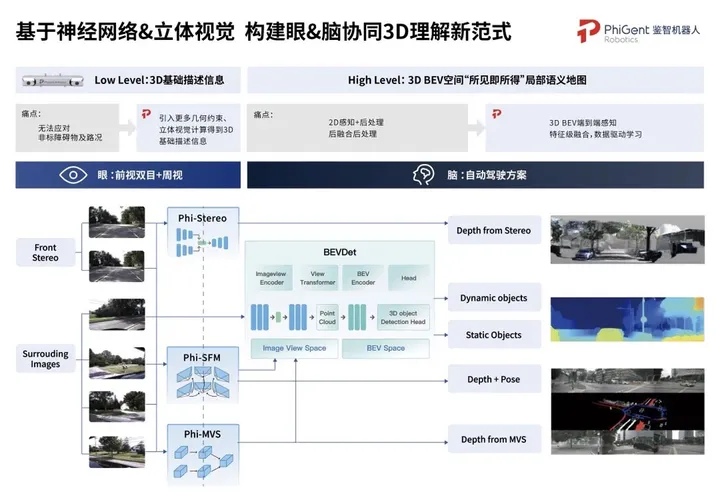
鉴智
鉴智分享过很多 demo,实现了基于双目的魔毯、智能底盘功能,和蔚来/奔驰的 4D 底盘异曲同工,也算是近年来把双目作为核心优势的重要玩家。
地平线
地平线 PoC 过双目,也有一些开源的工作,后续再观望观望。
奔驰
老法师奔驰早在13年前就分享过基于 stixel 的双目深度估计、freespace 预测 / 参考。
英伟达
英伟达作为奔驰的重要合作伙伴,优化、实现了不少双目的工作:
https://github.com/NVIDIA-AI-IOT/redtail/tree/master/stereoDNN
VPI - Vision Programming Interface
Stereo Disparity Sample
ACCELERATING OPTICAL FLOW AND STEREO DISPARITY ESTIMATION USING THE NVIDIA A100 OFA ENGINE
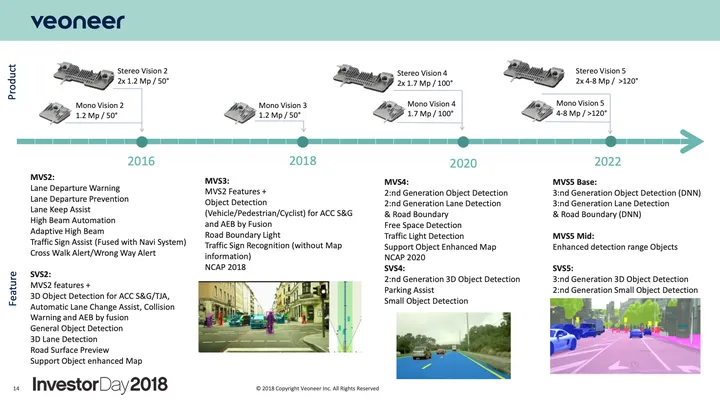
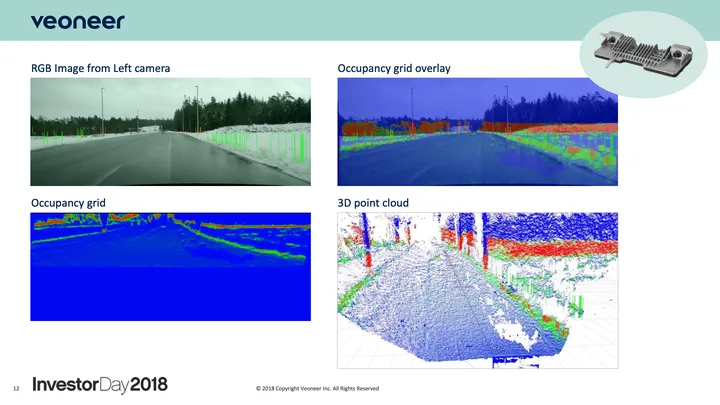
维宁尔 (Veoneer)
维宁尔曾是宝马、斯巴鲁的双目供应商,在2018年的投资者日上曾分享过双目规划。可以看到,基础方法论还是奔驰分享的 stereo stixel

华为 ADS 1.0
华为在 ADS 1.0 上规划了前向四目,除了广角和长焦外,还有一对双目。不过从 ADS 2.0 的交付来看,最终还是拥抱了 LiDAR-centeric 而不是双目视觉。
ArgoAI
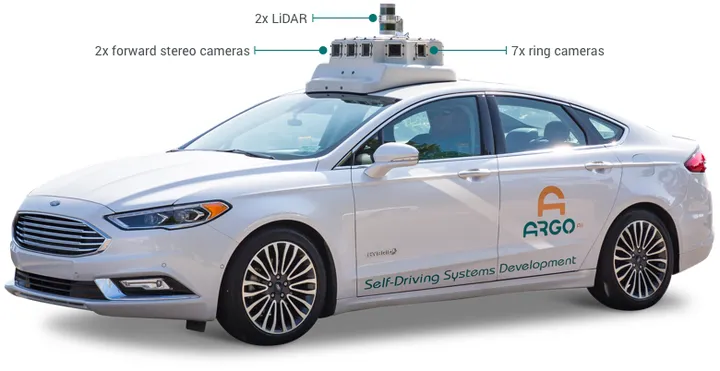

ArgoAI 1/2 都包含了双目数据,在 CVPR 2021/2022 都举办过比赛。但里面都是一些成熟模型的 finetune 和刷点,缺乏一些新意和实践价值。
安霸/VisLab
多组双目系统的想法一开始由安霸/VisLab 的视频启发,他们实现了一个前向两对双目(包括长焦)的系统。还有一个视频,很可惜找不到了,这个视频描述了 VisLab 在 side 和 rear 装了多组双目,实现实时的全向深度估计。这个想法,很类似于 Mobileye 2020年发布的 VIDAR,以及 TRL 的 Full Surround Monodepth. 这些成果,都来源于VisLab 十多年的立体视觉研究积累。
ForeSight
ForeSight 分享过他们的异构双目系统,我曾经去常州实车体验过:
前向 120 度和 bumper 200 度广角实现的双目 (类似于 TW-SMNet)
车顶的 30 度 RGB 双目
车顶的 IR 红外双目
这块可以参考:
iPhone 15 上的空间视频拍摄 / Tele
GitHub - ComVisDinh/disparityestimation: Deep Network Exploitation for Disparity Estimation Using Stereo Images with Different Focal Lengths
视角不平衡立体匹配研究-CSDN博客

蔚来/理想
蔚来/理想的两个 front side 相机 FOV overlap 较小,非光心对齐同构。也不是不能做双目,但可能效果较差。

智加/Plus
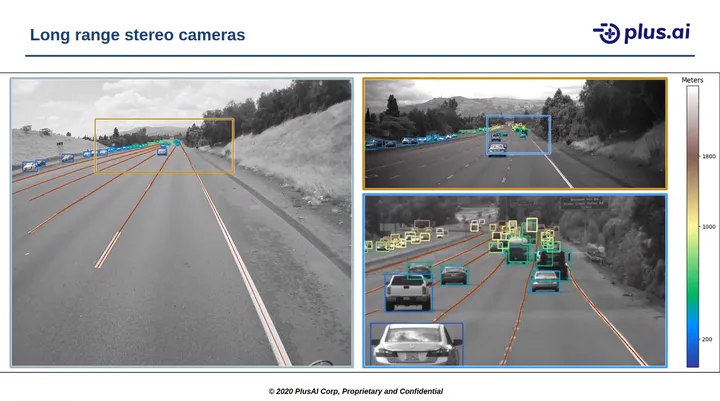
无论是 2021 年量产交付的解放 J7+, 还是 2023 年的江淮 K7+、2024 年的柳汽 H7+,长基线双目都是我们最核心的模块。多年前,我们曾发布过 1km 以上的目标感知结果,但那是基于 L4 状态下的超宽基线(双目布置在车侧, 2.8m 基线)。在 L2+ 量产平台下,我们需要将双目摄像头放在挡风玻璃内,能够被雨刮覆盖,并满足法规和稳定性要求。
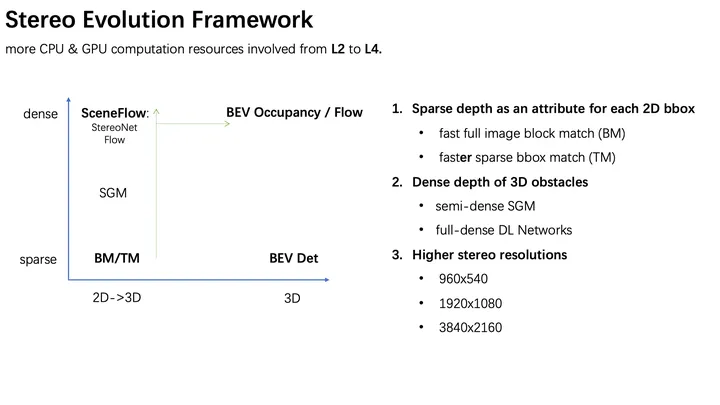
在感知架构上,最早期,感知方案主要还是 2D 检测为主,通过 2D 检测去抠深度图,或者通过接地点等几何先验去测距。渐渐的,有了很多 Mono3D 检测,Stereo3D 检测的工作。最后,收敛到 BEV 前融合 3D 检测,甚至全稀疏的 Sparse BEV. 但不管何时,在前向远距离感知上,双目都能够持续提升感知的整体上限。例如,我们做过不少事情去探索双目的价值:
第一件事是,通过 SGM/optical flow 这些底层特征,识别非标/超宽障碍物。但实践下来,很难简单地与 3D 表达兼容。我们渐渐地发现,相较于2D 视角,BEV/Occupancy 是一个更优雅的框架去解决这些难题。逻辑上还是相似的,BEV/Occ 仍然需要去表达、解释这些稠密的底层特征和时序特征。

第二件事是,仅对 bbox 内的点去做 match,相同精度下仅有 1/2 latency,并能提升远处 recall. 即使在夜晚,我们也能有 300m 的稳定 trakcing.
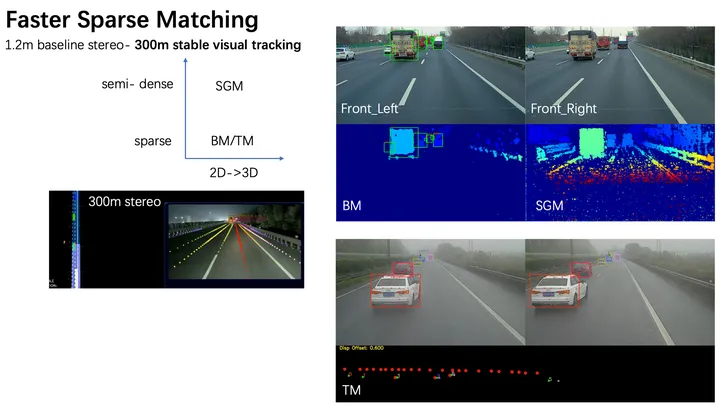
第三件事是,在高分辨图下,动态裁剪 2M 原图,通过一个额外的 2D 检测器以及稀疏匹配,实现远距离小目标 2倍 tracking 性能的提升 (cone, 80m->160m), 整体感知 tracking 距离从 300m+ 到近 400m.
第四件事是,实现长焦双目。效果显而易见, Z=fb/d. 焦距 f 的提升能够简单而有效地提升远处距离性能。但简单替换相机,会造成前向盲区过大的问题。在框架上,需要通过广角相机去做车道线等模块。有一定的系统迁移成本。

总结
无论是图森的 LiDAR-centeric 方案,还是智加的 Stereo-centeric, 核心本质还是提升远距离 tracking 的稳定性。就好像 @王峰 提到的 “对于远距离感知的探索不能说是一帆风顺,简直就是满路荆棘。”
上面这些工作,都是在 Xavier 低算力平台下循序渐进的思考和实践。在 Orin 平台下,我们已经渐渐地过渡到视觉 BEV 3D 框架。但正如图森的分享,在卡车领域里,数以亿计的 2D 数据仍然在和 3D 需求互相融合,继续完善。
后续的实践,是将高分辨率 RoI 双目集成到 BEV 框架中。当有充沛的远距离 GT 数据时,不管是 dense-bev 还是 sparse query bev,都能看得更远更稳。等待合适时机再跟大家分享 :-P
最后也是最重要的,要感谢智加/Plus 的同事们 (Tim, Mianwei, Darren, Philip, Andy, Tong, Peidong, Xingjian, Fuyue, Xuyang),我只是起到了个承上启下的作用 。
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2400人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!


















 2962
2962

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









