




 本文通过实例分析和线性代数原理探讨了齐次变换矩阵在进行复合变换时顺序的重要性,展示了顺序改变如何导致不同结果,并引用了同济大学工程线性代数教材作为参考。
本文通过实例分析和线性代数原理探讨了齐次变换矩阵在进行复合变换时顺序的重要性,展示了顺序改变如何导致不同结果,并引用了同济大学工程线性代数教材作为参考。
为防止文章过长乏味,将此博客分为上下两篇。下篇是对上篇例题的例题常规求解和线性代数的解释。
常规求解
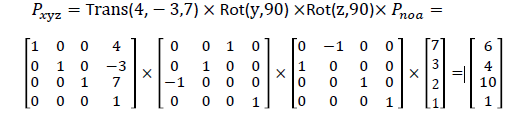
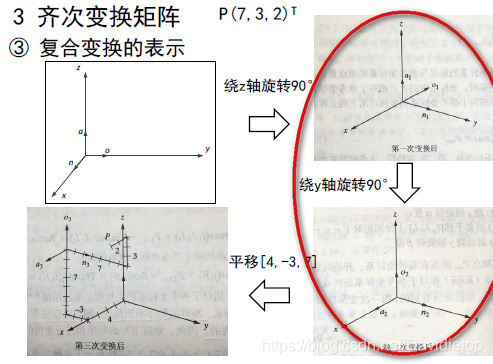
固连在坐标系(𝑛,𝑜,𝑎)上的点P(7,3,2)T 经历如下变换,求出变换后该点相对于固定参考坐标系的坐标。
(1)绕z轴旋转90°;
(2)接着绕y轴旋转90°;
(3)接着再平移[4,-3,7];
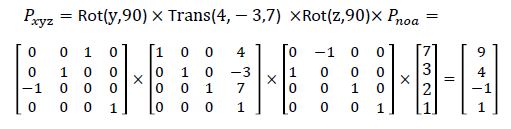
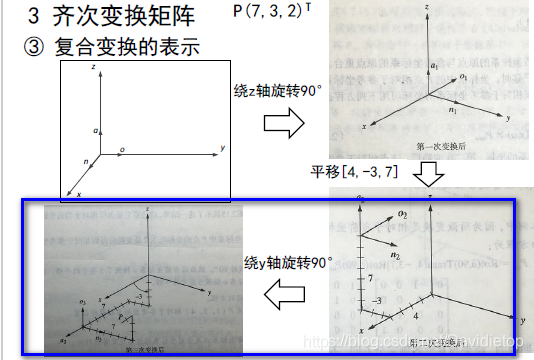
倒转一下(2)和(3)的顺序
(1)绕z轴旋转90°;
(2)接着再平移[4,-3,7];
(3)接着绕y轴旋转90°;
对比不同顺序的同一个步骤而言,直接看图我觉得有点抽象。大家可用自己的手臂一次平移一次旋转摆弄一下。
|
|
线性代数的解释
- 矩阵的行数和列数不允许相乘,上一个矩阵的列数不等于下一个矩阵的行数。
如3x2的A和2x5的B可以相乘,但是BA这样的乘法是不允许的、没有定义的。 - 即使转换乘法顺序后,上一个矩阵的列数仍等于下一个矩阵的行数,得到的结果也可能不相等。
A = [ − 2 4 1 − 2 ] \pmb{A}=\begin{bmatrix} -2 & 4 \\ 1 & -2\\ \end{bmatrix} AAA=[−214−2]
B = [ 2 4 − 3 − 6 ] \pmb{B}=\begin{bmatrix} 2 & 4 \\ -3 & -6\\ \end{bmatrix}
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2296
2296

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









