









recovery_beheviors机制
一.总览
当移动机器人认为自己被卡住时,指导机器人进行一系列的恢复行为。
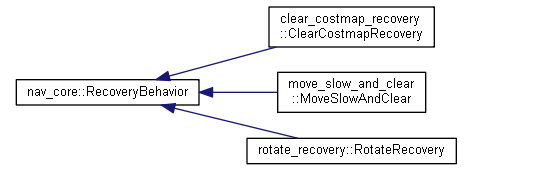
navigation包中的恢复行为主要包括三种:
- clean_costmap_recovery:先清理周围一定范围以外的costmap
- rotate_recovery:旋转360度
- move_slow_and_clean:缓慢移动
二.recovery的触发条件
都是在move_base.cpp里进行的主流程的控制
三种触发条件,如下:
enum RecoveryTrigger
{
PLANNING_R, // 全局规划失败
CONTROLLING_R, // 局部轨迹规划失败
OSCILLATION_R // 长时间在小区域运动(机器人震荡)
};
三.恢复行为
1.clean_costmap_recovery
先清理周围一定范围以外的costmap
会清理从机器人所在位置开始,指定 reset_distance_米的矩形范围之外的 costmap 中数据, 默认清理 obstacle layer 的数据 (取决于layer_names配置)。
清理时,将地图中内容设置为未知。
清除指定的 layer 层,affected_maps参数设置是否清除global/local/all。
该模块代码注释说明:
#include <boost/pointer_cast.hpp>
#include <clear_costmap_recovery/clear_costmap_recovery.h>
#include <pluginlib/class_list_macros.h>
#include <vector>
// register this planner as a RecoveryBehavior plugin
// 该插件将costmap中给定半径(reset_distance_默认值3.0)范围之内的区域进行清理,即将栅格状态更新为未知信息
PLUGINLIB_EXPORT_CLASS(clear_costmap_recovery::ClearCostmapRecovery,
nav_core::RecoveryBehavior)
using costmap_2d::NO_INFORMATION;
namespace clear_costmap_recovery {
ClearCostmapRecovery::ClearCostmapRecovery()
: global_costmap_(NULL), local_costmap_(NULL), tf_(NULL),
initialized_(false) {}
void ClearCostmapRecovery::initialize(std::string name, tf2_ros::Buffer *tf,
costmap_2d::Costmap2DROS *global_costmap,
costmap_2d::Costmap2DROS *local_costmap) {
if (!initialized_) {
name_ = name;
tf_ = tf;
global_costmap_ = global_costmap;
local_costmap_ = local_costmap;
// 参数服务器中获得参数
ros::NodeHandle private_nh("~/" + name_);
// 代价地图清除的距离 以该范围为边长 画一个正方形
//从地图上清除用户该区域以外的障碍物
private_nh.param("reset_distance", reset_distance_, 3.0);
private_nh.param("invert_area_to_clear", invert_area_to_clear_, false);
private_nh.param("force_updating", force_updating_, false);
private_nh.param("affected_maps", affected_maps_, std::string("both"));
// 地图清理的范围 local global 或者两者都包括
if (affected_maps_ != "local" && affected_maps_ != "global" &&
affected_maps_ != "both") {
ROS_WARN("Wrong value for affected_maps parameter: '%s'; valid values "
"are 'local', 'global' or 'both'; "
"defaulting to 'both'",
affected_maps_.c_str());
affected_maps_ = "both";
}
// 清理的地图层 默认障碍物层
std::vector<std::string>
clearable_layers_default, clearable_layers;
clearable_layers_default.push_back(std::string("obstacles"));
private_nh.param("layer_names", clearable_layers, clearable_layers_default);
for (unsigned i = 0; i < clearable_layers.size(); i++) {
ROS_INFO("Recovery behavior will clear layer '%s'",
clearable_layers[i].c_str());
clearable_layers_.insert(clearable_layers[i]);
}
initialized_ = true;
} else {
ROS_ERROR(
"You should not call initialize twice on this object, doing nothing");
}
}
void ClearCostmapRecovery::runBehavior() {
if (!initialized_) {
ROS_ERROR("This object must be initialized before runBehavior is called");
return;
}
if (global_costmap_ == NULL || local_costmap_ == NULL) {
ROS_ERROR("The costmaps passed to the ClearCostmapRecovery object cannot "
"be NULL. Doing nothing.");
return;
}
if (!invert_area_to_clear_) {
ROS_WARN("Clearing %s costmap%s outside a square (%.2fm) large centered on "
"the robot.",
affected_maps_.c_str(), affected_maps_ == "both" ? "s" : "",
reset_distance_);
} else {
ROS_WARN("Clearing %s costmap%s inside a square (%.2fm) large centered on "
"the robot.",
affected_maps_.c_str(), affected_maps_ == "both" ? "s" : "",
reset_distance_);
}
ros::WallTime t0 = ros::WallTime::now();
if (affected_maps_ == "global" || affected_maps_ == "both") {
clear(global_costmap_);
if (force_updating_)
global_costmap_->updateMap();
ROS_DEBUG("Global costmap cleared in %fs",
(ros::WallTime::now() - t0).toSec());
}
t0 = ros::WallTime::now();
if (affected_maps_ == "local" || affected_maps_ == "both") {
clear(local_costmap_);
if (force_updating_)
local_costmap_->updateMap();
ROS_DEBUG("Local costmap cleared in %fs",
(ros::WallTime::now() - t0).toSec());
}
}
/*
获取了costmap的各个地图层,在for循环中不断寻找clearable_layers_中是否有各地图层的名字,
若有,则对其调用clearMap、进行清理。
*/
void ClearCostmapRecovery::clear(costmap_2d::Costmap2DROS *costmap) {
std::vector<boost::shared_ptr<costmap_2d::Layer>> *plugins =
costmap->getLayeredCostmap()->getPlugins();
geometry_msgs::PoseStamped pose;
// 获得机器人全局位姿
if (!costmap->getRobotPose(pose)) {
ROS_ERROR("Cannot clear map because pose cannot be retrieved");
return;
}
double x = pose.pose.position.x;
double y = pose.pose.position.y;
for (std::vector<boost::shared_ptr<costmap_2d::Layer>>::iterator pluginp =
plugins->begin();
pluginp != plugins->end(); ++pluginp) {
boost::shared_ptr<costmap_2d::Layer> plugin = *pluginp;
std::string name = plugin->getName();
// 返回该字符在字符串中的下标
int slash = name.rfind('/');
// 如果找到匹配的
// npos是一个常数,用来表示不存在的位置,string::npos代表字符串到头了结束了
if (slash != std::string::npos) {
name = name.substr(slash + 1);
}
if (clearable_layers_.count(name) != 0) {
// 检查该layer是否来自costmap_2d::CostmapLayer
if (!dynamic_cast<costmap_2d::CostmapLayer *>(plugin.get())) {
ROS_ERROR_STREAM("Layer "
<< name
<< " is not derived from costmap_2d::CostmapLayer");
continue;
}
boost::shared_ptr<costmap_2d::CostmapLayer> costmap;
costmap = boost::static_pointer_cast<costmap_2d::CostmapLayer>(plugin);
// 重置特定层的代价地图
clearMap(costmap, x, y);
}
}
}
/*
clearMap函数就执行真正的清理工作了,保留机器人周围以reset_distance_为边长的矩形区域,
将其余区域的cell都设置为未知。
*/
void ClearCostmapRecovery::clearMap(
boost::shared_ptr<costmap_2d::CostmapLayer> costmap, double pose_x,
double pose_y) {
boost::unique_lock<costmap_2d::Costmap2D::mutex_t> lock(
*(costmap->getMutex()));
// 以当前位置为中心 reset_distance_为边长的正方形区域
double start_point_x = pose_x - reset_distance_ / 2;
double start_point_y = pose_y - reset_distance_ / 2;
double end_point_x = start_point_x + reset_distance_;
double end_point_y = start_point_y + reset_distance_;
//从世界坐标系转换到地图坐坐标系下,地图没有边界 即像素索引
int start_x, start_y, end_x, end_y;
costmap->worldToMapNoBounds(start_point_x, start_point_y, start_x,
start_y); // meter --> pixel
costmap->worldToMapNoBounds(end_point_x, end_point_y, end_x, end_y);
// 将特定栅格更新为未知信息
costmap->clearArea(start_x, start_y, end_x, end_y, invert_area_to_clear_);
double ox = costmap->getOriginX(), oy = costmap->getOriginY();
double width = costmap->getSizeInMetersX(),
height = costmap->getSizeInMetersY();
costmap->addExtraBounds(ox, oy, ox + width, oy + height); // 1e6
return;
}
}; // namespace clear_costmap_recovery
2.rotate_recovery
旋转360度,更新周围的障碍物信息;
该模块代码注释说明:
#include <algorithm>
#include <angles/angles.h>
#include <geometry_msgs/Point.h>
#include <geometry_msgs/Twist.h>
#include <nav_core/parameter_magic.h>
#include <pluginlib/class_list_macros.h>
#include <ros/ros.h>
#include <rotate_recovery/rotate_recovery.h>
#include <string>
#include <tf2/utils.h>
// register this planner as a RecoveryBehavior plugin
PLUGINLIB_EXPORT_CLASS(rotate_recovery::RotateRecovery,
nav_core::RecoveryBehavior)
namespace rotate_recovery {
RotateRecovery::RotateRecovery()
: local_costmap_(NULL), initialized_(false), world_model_(NULL) {}
void RotateRecovery::initialize(std::string name, tf2_ros::Buffer *,
costmap_2d::Costmap2DROS *,
costmap_2d::Costmap2DROS *local_costmap) {
if (!initialized_) {
local_costmap_ = local_costmap;
// get some parameters from the parameter server
ros::NodeHandle private_nh("~/" + name);
ros::NodeHandle blp_nh("~/TrajectoryPlannerROS");
// 默认会模拟仿真每一度(degree)旋转的情况
private_nh.param("sim_granularity", sim_granularity_, 0.017);
private_nh.param("frequency", frequency_, 20.0);
acc_lim_th_ = nav_core::loadParameterWithDeprecation(
blp_nh, "acc_lim_theta", "acc_lim_th", 3.2);
max_rotational_vel_ = nav_core::loadParameterWithDeprecation(
blp_nh, "max_vel_theta", "max_rotational_vel", 1.0);
min_rotational_vel_ = nav_core::loadParameterWithDeprecation(
blp_nh, "min_in_place_vel_theta", "min_in_place_rotational_vel", 0.4);
blp_nh.param("yaw_goal_tolerance", tolerance_, 0.10);
world_model_ =
new base_local_planner::CostmapModel(*local_costmap_->getCostmap());
initialized_ = true;
} else {
ROS_ERROR(
"You should not call initialize twice on this object, doing nothing");
}
}
RotateRecovery::~RotateRecovery() { delete world_model_; }
void RotateRecovery::runBehavior() {
if (!initialized_) {
ROS_ERROR("This object must be initialized before runBehavior is called");
return;
}
if (local_costmap_ == NULL) {
ROS_ERROR("The costmap passed to the RotateRecovery object cannot be NULL. "
"Doing nothing.");
return;
}
ROS_WARN("Rotate recovery behavior started.");
ros::Rate r(frequency_);
ros::NodeHandle n;
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("cmd_vel", 10);
// 获取当前位姿 朝向
geometry_msgs::PoseStamped global_pose;
local_costmap_->getRobotPose(global_pose);
double current_angle = tf2::getYaw(global_pose.pose.orientation);
// step 1 : 恢复前的位姿朝向
double start_angle = current_angle;
bool got_180 = false;
while (n.ok() &&
(!got_180 || std::fabs(angles::shortest_angular_distance(
current_angle, start_angle)) > tolerance_)) {
// shortest_angular_distance调用了angles包,获取两角度的最小角度差
// step 2 : while循环中更新当前角度
local_costmap_->getRobotPose(global_pose);
current_angle = tf2::getYaw(global_pose.pose.orientation);
double dist_left; // 剩余向左旋转的距离
// step 3: 更新dist_left
if (!got_180) // case 1 : 如果没有旋转到半圈
{
// 如果没有转到180度,还要旋转 distance_to_180度 + 半圈
double distance_to_180 = std::fabs(
angles::shortest_angular_distance(current_angle, start_angle + M_PI));
dist_left = M_PI + distance_to_180;
// 到了误差允许范围
if (distance_to_180 < tolerance_) {
got_180 = true;
}
} else // case 2: 旋转有半圈了
{
dist_left = std::fabs(
angles::shortest_angular_distance(current_angle, start_angle));
}
double x = global_pose.pose.position.x, y = global_pose.pose.position.y;
// step 4: 检查该速度下的推算位姿是否有碰撞可能
double sim_angle = 0.0;
while (sim_angle < dist_left) {
double theta = current_angle + sim_angle;
// 确保这个位姿没有碰撞风险,不然会停止
// 获取该位姿下的代价值,若<0 则会碰撞
double footprint_cost = world_model_->footprintCost(
x, y, theta, local_costmap_->getRobotFootprint(), 0.0, 0.0);
if (footprint_cost < 0.0) {
ROS_ERROR("Rotate recovery can't rotate in place because there is a "
"potential collision. Cost: %.2f",
footprint_cost);
return;
}
sim_angle += sim_granularity_;
}
// step 5: 计算下发速度,让机器人可以在到达终点时停止
double vel = sqrt(2 * acc_lim_th_ * dist_left);
// step 6: 确保下发旋转速度满足速度限制要求
vel = std::min(std::max(vel, min_rotational_vel_), max_rotational_vel_);
geometry_msgs::Twist cmd_vel;
cmd_vel.linear.x = 0.0;
cmd_vel.linear.y = 0.0;
cmd_vel.angular.z = vel;
vel_pub.publish(cmd_vel);
r.sleep();
}
}
}; // namespace rotate_recovery
3.move_slow_and_clean
缓慢移动一段距离
清理 costmap 然后什么都不管,按照前进速度和转角速度走。
根据指定的距离,这是通过先清除全局 costmap 跟局部 costmap 一圈的 obstacle layer 的障碍,然后直接发指令实现的。
由于只清除了 obstacle layer ,其实 static layer 的障碍还在,而且这里清不清除跟发指令关系不大,该撞上去的还是会撞的,相当于闭着眼睛往前走;
#include <costmap_2d/obstacle_layer.h>
#include <move_slow_and_clear/move_slow_and_clear.h>
#include <pluginlib/class_list_macros.h>
PLUGINLIB_EXPORT_CLASS(move_slow_and_clear::MoveSlowAndClear,
nav_core::RecoveryBehavior)
namespace move_slow_and_clear {
MoveSlowAndClear::MoveSlowAndClear()
: global_costmap_(NULL), local_costmap_(NULL), initialized_(false),
remove_limit_thread_(NULL), limit_set_(false) {}
MoveSlowAndClear::~MoveSlowAndClear() { delete remove_limit_thread_; }
void MoveSlowAndClear::initialize(std::string n, tf2_ros::Buffer *tf,
costmap_2d::Costmap2DROS *global_costmap,
costmap_2d::Costmap2DROS *local_costmap) {
global_costmap_ = global_costmap;
local_costmap_ = local_costmap;
ros::NodeHandle private_nh_("~/" + n);
// 机器人清除范围
private_nh_.param("clearing_distance", clearing_distance_, 0.5);
// 该修复行为时候限定的线速度
private_nh_.param("limited_trans_speed", limited_trans_speed_, 0.25);
// 该修复行为时候限定的旋转速度
private_nh_.param("limited_rot_speed", limited_rot_speed_, 0.45);
// limited_distance_*limited_distance_ 允许机器人运动的最大距离
private_nh_.param("limited_distance", limited_distance_, 0.3);
private_nh_.param("max_trans_param_name", max_trans_param_name_,
std::string("max_trans_vel"));
private_nh_.param("max_rot_param_name", max_rot_param_name_,
std::string("max_rot_vel"));
std::string planner_namespace;
private_nh_.param("planner_namespace", planner_namespace,
std::string("DWAPlannerROS"));
planner_nh_ = ros::NodeHandle("~/" + planner_namespace);
planner_dynamic_reconfigure_service_ =
planner_nh_.serviceClient<dynamic_reconfigure::Reconfigure>(
"set_parameters", true);
initialized_ = true;
}
void MoveSlowAndClear::runBehavior() {
if (!initialized_) {
ROS_ERROR(
"This recovery behavior has not been initialized, doing nothing.");
return;
}
ROS_WARN("Move slow and clear recovery behavior started.");
// 获取当前位姿
geometry_msgs::PoseStamped global_pose, local_pose;
global_costmap_->getRobotPose(global_pose);
local_costmap_->getRobotPose(local_pose);
std::vector<geometry_msgs::Point> global_poly, local_poly;
geometry_msgs::Point pt;
// 确定要清除的区域大小 正方形
for (int i = -1; i <= 1; i += 2) {
pt.x = global_pose.pose.position.x + i * clearing_distance_;
pt.y = global_pose.pose.position.y + i * clearing_distance_;
global_poly.push_back(pt);
pt.x = global_pose.pose.position.x + i * clearing_distance_;
pt.y = global_pose.pose.position.y + -1.0 * i * clearing_distance_;
global_poly.push_back(pt);
pt.x = local_pose.pose.position.x + i * clearing_distance_;
pt.y = local_pose.pose.position.y + i * clearing_distance_;
local_poly.push_back(pt);
pt.x = local_pose.pose.position.x + i * clearing_distance_;
pt.y = local_pose.pose.position.y + -1.0 * i * clearing_distance_;
local_poly.push_back(pt);
}
// 清除代价地图中特定区域
// 获取每一层的插件
std::vector<boost::shared_ptr<costmap_2d::Layer>> *plugins =
global_costmap_->getLayeredCostmap()->getPlugins();
for (std::vector<boost::shared_ptr<costmap_2d::Layer>>::iterator pluginp =
plugins->begin();
pluginp != plugins->end(); ++pluginp) {
boost::shared_ptr<costmap_2d::Layer> plugin = *pluginp;
if (plugin->getName().find("obstacles") != std::string::npos) {
boost::shared_ptr<costmap_2d::ObstacleLayer> costmap;
costmap = boost::static_pointer_cast<costmap_2d::ObstacleLayer>(plugin);
//将global_map的指定区域设置为free
costmap->setConvexPolygonCost(global_poly, costmap_2d::FREE_SPACE);
}
}
plugins = local_costmap_->getLayeredCostmap()->getPlugins();
for (std::vector<boost::shared_ptr<costmap_2d::Layer>>::iterator pluginp =
plugins->begin();
pluginp != plugins->end(); ++pluginp) {
boost::shared_ptr<costmap_2d::Layer> plugin = *pluginp;
if (plugin->getName().find("obstacles") != std::string::npos) {
boost::shared_ptr<costmap_2d::ObstacleLayer> costmap;
costmap = boost::static_pointer_cast<costmap_2d::ObstacleLayer>(plugin);
//将local_costmap的指定区域设置为free
costmap->setConvexPolygonCost(local_poly, costmap_2d::FREE_SPACE);
}
}
// 加锁保护
boost::mutex::scoped_lock l(mutex_);
// 获得上个阶段的最大速度
if (!limit_set_) {
// 如果之前没有限制速度
if (!planner_nh_.getParam(max_trans_param_name_, old_trans_speed_)) {
ROS_ERROR("The planner %s, does not have the parameter %s",
planner_nh_.getNamespace().c_str(),
max_trans_param_name_.c_str());
}
if (!planner_nh_.getParam(max_rot_param_name_, old_rot_speed_)) {
ROS_ERROR("The planner %s, does not have the parameter %s",
planner_nh_.getNamespace().c_str(),
max_rot_param_name_.c_str());
}
}
// we also want to save our current position so that we can remove the speed
// limit we impose later on 存储当前位置
speed_limit_pose_ = global_pose;
// limit the speed of the robot until it moves a certain distance
setRobotSpeed(limited_trans_speed_, limited_rot_speed_);
limit_set_ = true;
distance_check_timer_ = private_nh_.createTimer(
ros::Duration(0.1), &MoveSlowAndClear::distanceCheck, this);
}
// 计算当前已经移动的距离
double MoveSlowAndClear::getSqDistance() {
geometry_msgs::PoseStamped global_pose;
global_costmap_->getRobotPose(global_pose);
double x1 = global_pose.pose.position.x;
double y1 = global_pose.pose.position.y;
double x2 = speed_limit_pose_.pose.position.x;
double y2 = speed_limit_pose_.pose.position.y;
return (x2 - x1) * (x2 - x1) + (y2 - y1) * (y2 - y1);
}
void MoveSlowAndClear::distanceCheck(const ros::TimerEvent &e) {
// 已行驶的距离是否超出设定的距离
if (limited_distance_ * limited_distance_ <= getSqDistance()) {
ROS_INFO("Moved far enough, removing speed limit.");
// have to do this because a system call within a timer cb does not seem to
// play nice
if (remove_limit_thread_) {
remove_limit_thread_->join();
delete remove_limit_thread_;
}
remove_limit_thread_ = new boost::thread(
boost::bind(&MoveSlowAndClear::removeSpeedLimit, this));
distance_check_timer_.stop();
}
}
void MoveSlowAndClear::removeSpeedLimit() {
boost::mutex::scoped_lock l(mutex_);
// 恢复之前的速度
setRobotSpeed(old_trans_speed_, old_rot_speed_);
limit_set_ = false;
}
void MoveSlowAndClear::setRobotSpeed(double trans_speed, double rot_speed) {
{
dynamic_reconfigure::Reconfigure vel_reconfigure;
dynamic_reconfigure::DoubleParameter new_trans;
new_trans.name = max_trans_param_name_;
new_trans.value = trans_speed;
vel_reconfigure.request.config.doubles.push_back(new_trans);
try {
planner_dynamic_reconfigure_service_.call(vel_reconfigure);
ROS_INFO_STREAM("Recovery setting trans vel: " << trans_speed);
} catch (...) {
ROS_ERROR(
"Something went wrong in the service call to dynamic_reconfigure");
}
}
{
dynamic_reconfigure::Reconfigure rot_reconfigure;
dynamic_reconfigure::DoubleParameter new_rot;
new_rot.name = max_rot_param_name_;
new_rot.value = rot_speed;
rot_reconfigure.request.config.doubles.push_back(new_rot);
try {
planner_dynamic_reconfigure_service_.call(rot_reconfigure);
ROS_INFO_STREAM("Recovery setting rot vel: " << rot_speed);
} catch (...) {
ROS_ERROR(
"Something went wrong in the service call to dynamic_reconfigure");
}
}
}
}; // namespace move_slow_and_clear
1. reference源码分析
2.reference














 1511
1511











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









