







move_bae框架
参考:http://wiki.ros.org/move_base
构成
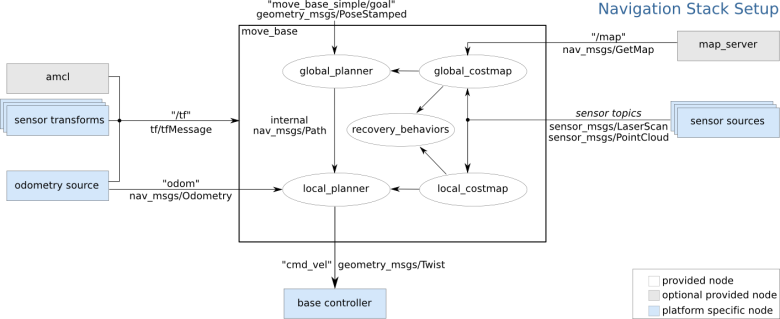
它由如下三部分构成:
- 实现一个actionlib,用于设定目标位置。
- 连接global planer和local planner,用于实现导航。可以通过重新实现nav_core::BaseGlobalPlanner 和 nav_core::BaseLocalPlanner 的接口,修改global planer和local planner的导航策略
- 维护两个two costmaps,一个为global planer,另一个为local planner
- recovery_behaviors: 如果找不到一条到达目标的路径,它就会运行一些清理机制,把地图中一些无效障碍物清理掉,重新制定路径。
节点组成如下图所示:
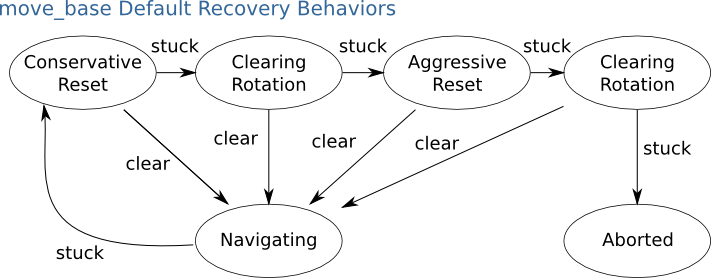
recovery_behaviors默认策略:
move_base参数
costmap_common_params.yaml
- robot_radius: 0.165 机器人
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









