









1. 介绍
EVO是用于处理、评估和比较里程计和SLAM算法的轨迹输出的工具
2. 安装
pip install evo --upgrade --no-binary evo
3. 使用
3.1 注意
- 不同格式的数据不能同时显示
- kitti: 数据,一行12个数据表位姿矩阵(R+T),数据举例如下:
//SE(3)
a b c d
e f g h
i j k l
3.2 样例数据说明
这里的ground_truth.txt保存的gnss的位姿矩阵,(3X4矩阵)
而laser_odom.txt保存的也是相同格式的位姿矩阵
3.3 使用
3.3.1 每段距离误差(相对位姿误差)
evo_rpe kitti ground_truth.txt laser_odom.txt -r trans_part --delta 100 --plot --plot_mode xyz
- –delta 100 表示每隔100米统计一次误差(其实就是误差百分比)
结果
 得到的统计指标:
得到的统计指标:
- 最大误差: 48.902621%(起始点没做好)
- 平均误差: 3.123055%
- 最小误差: 0.418251%
- RMSE: 7.655457%
3.3.2 总累计误差(绝对位姿误差)
evo_ape kitti ground_truth.txt laser_odom.txt -r full --plot --plot_mode xyz
结果
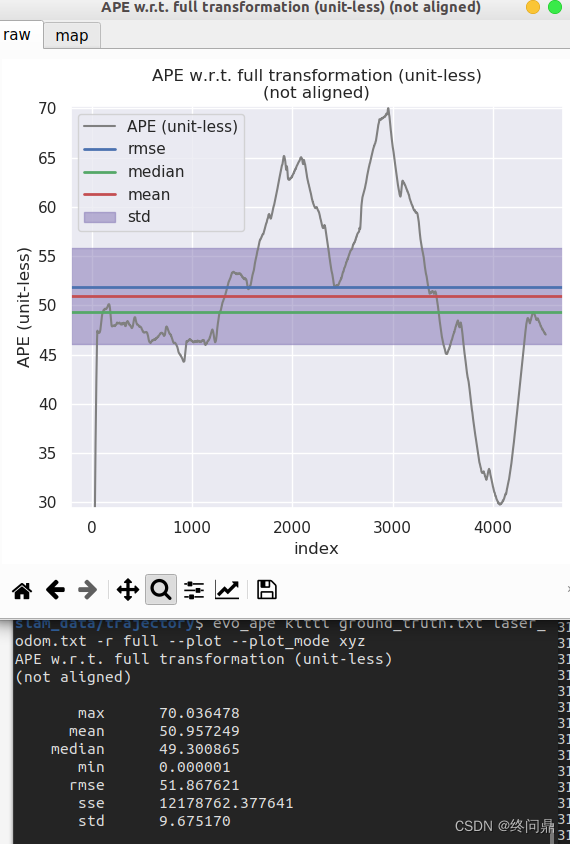
- 其中灰色部分就是累计误差.
- 最大值: 70.036478 m
- 平均值: 50.957249 m
- RMSE: 51.867621 m
















 634
634











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









