







0 Preface
本文及后续的文章将主要从智驾域AD Domain开始进行相关技术的思考和总结。
智能驾驶是目前汽车领域最火的方向之一,随着AI技术的发展近几年里智驾的水平也有了长足的进步,功能层面上从ADAS辅助驾驶到高速/城市NOA再到当前车位到车位,已经无限接近于L3级自动驾驶了。算法层面上从2D/3D感知+基于规则的规控逐渐迭代为4D BEV+时空规划模型,再到最近最新的E2E端到端大模型和VLM视觉语言模型,最终向着VLA模型演进。
模型的输入仍然来源于感知数据,基于整车厂的算法架构不同,有Tesla Camera纯视觉方案;也有Xpeng的Camera+Lidar+Radar的多传感器方案。同时,定位算法也从高精地图方案向着轻图或是无图的方案演进。
模型的输出是规控的路径信息,经由逻辑算法最终输出给执行器,执行器来控制车辆横纵向运动。执行器基于整车底盘控制器的选择:刹车主要有ESP+iBooster方案,IPB+RBU方案或是线控的EMB方案;转向有ESP方案或是线控的HWA+RWA方案;加减速则由车辆的能源类型决定,电动车一般有动力电机控制器参与。
而承载模型的则是车端的推理芯片,近些年来车端智驾芯片的算力越来越高,以Nvidia芯片为例,上一代的OxinX已经可以提供254TOPS的AI算力,而即将量产的ThorX将达到1000TOPS。
从系统角度而言,需要关注的是车端感知的传感器原理、传感器方案;域控制器的软硬件架构设计以及执行端的执行器方案,后面将一一展开。
1 驾驶自动化等级说明
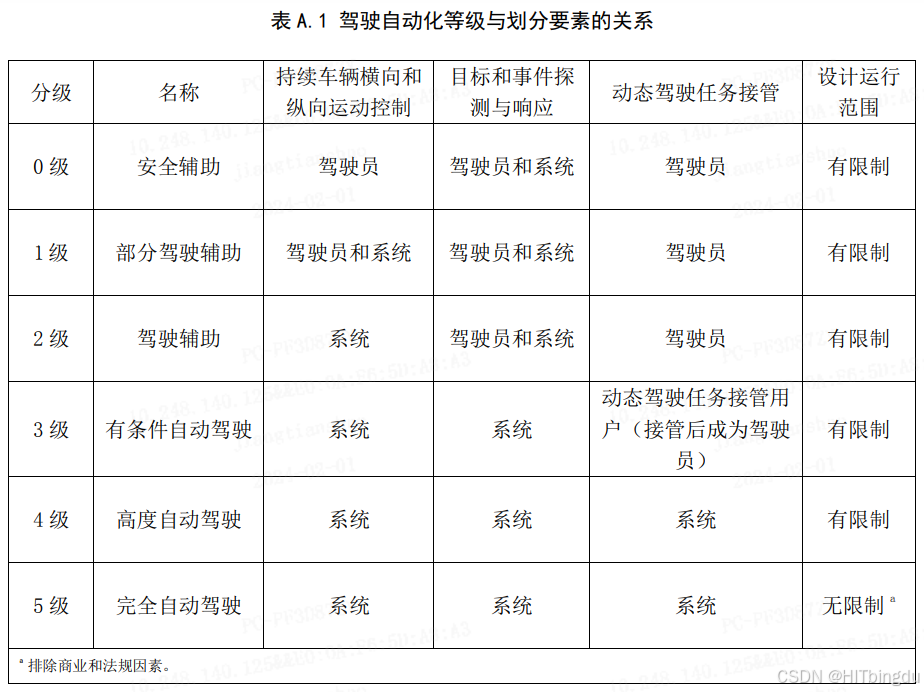
SAE J3016以及GB/T 40429 《汽车驾驶自动化分级》中规定了驾驶自动化各等级的定义。
- L0级驾驶自动化:驾驶自动化系统不能持续执行动态驾驶任务中的车辆横向或纵向运动控制,但具备持续执行动 态驾驶任务中的部分目标和事件探测与响应的能力。
- L1级驾驶自动化:驾驶自动化系统在其设计运行范围内持续地执行动态驾驶任务中的车辆横向或纵向运动控制, 且具备与所执行的横向或纵向运动控制相适应的部分目标和事件探测与响应的能力。
- L2级驾驶自动化:驾驶自动化系统在其设计运行范围内持续地执行动态驾驶任务中的车辆横向和纵向运动控制, 且具备与所执行的横向和纵向运动控制相适应的部分目标和事件探测与响应的能力。
- L3级驾驶自动化:驾驶自动化系统在其设计运行范围内持续地执行全部动态驾驶任务。
- L4级驾驶自动化:驾驶自动化系统在其设计运行范围内持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
- L5级驾驶自动化:驾驶自动化系统在任何可行驶条件下持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
L0化可感知环境,并提供报警、辅助或短暂介入以辅助驾驶员,比如AEB
L1相比于L0可以实现横向或纵向控制,比如ACC
L2相比于L1则是实现横向和纵向控制,比如ACC+LCC,以及NOA,值得一提的是,目前OEM基本宣称行车或泊车达到了L2+的水平,但驾驶责任仍然属于驾驶员
L3相比于L2来说已经可以实现智能驾驶的所有功能,只是当系统发生故障时,发出驾驶员接管请求,并在接管要求发出10秒后执行最小风险策略(MRM)
L4相比于L3来说无需驾驶员接管,智驾功能可以在设计运行范围内运行
L5相比于L4则对设计运行范围无要求,也就是说智驾功能可以在任何场景下运行
2 自动驾驶系统设计运行条件
《自动驾驶系统设计运行条件白皮书》给出了ODC,operational design condition 设计运行条件的定义、原则以及元素。
设计运行条件,即自动驾驶系统可以启动、安全执行动态驾驶任务的条件。通过定义设计运行条件,明确自动驾驶系统的功能和局限性,并将该功能和局限传递给自动驾驶系统或用户。也就是说,自动驾驶系统的启动和运行是限定在其设计运行条件内的。在既定的条件内,自动驾驶系统可以安全的启动和运行,超过了该条件,自动驾驶系统就会存在风险。
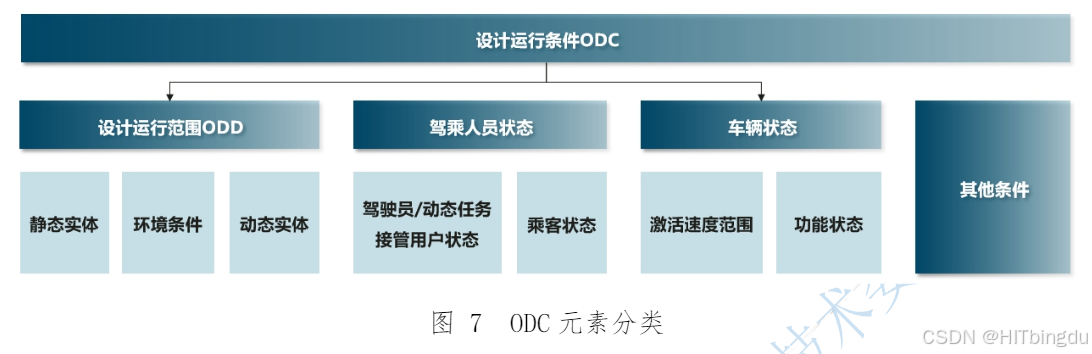
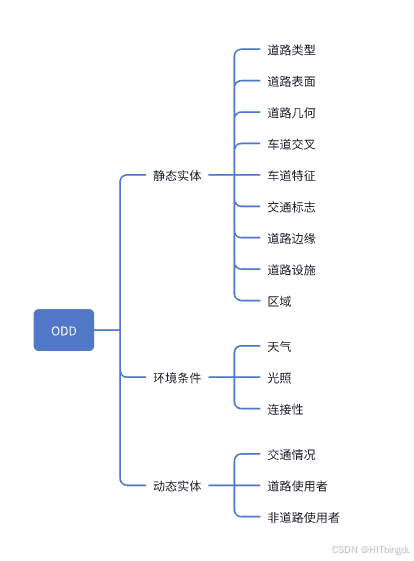
2.1 ODD
ODD,operational design domain 设计运行范围
“静态实体”应由运行环境下状态不改变的实体组成,如:道路、交通灯等;
“环境条件”应包括天气、大气条件和信息环境;
“动态实体”应由运行时间内状态发生变化的实体组成,如交通情况、道路使用者等。
2.2 驾驶人员状态
驾乘人员主要分为驾驶员/动态驾驶任务后援用户和乘客。自动驾驶系统安全启动和运行时要求动态驾驶任务后援用户的状态满足及时接管的条件,同时要求驾乘人员的状态达到一定的安全条件。
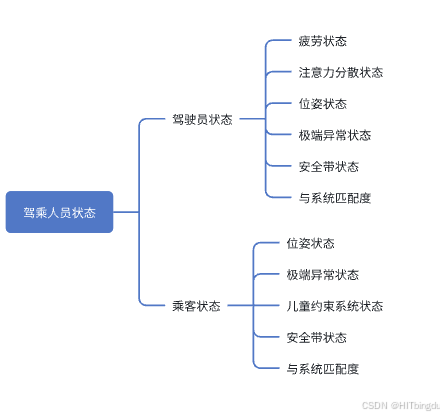
“疲劳”的严重程度和“注意力分散”的等级程度由企业自定义,并进行说明,如可从闭眼时间、打哈欠时间等对疲劳程度进行判断,可从视线方向、是否接打手机等状态对注意力分散程度进行判断。
针对“乘客状态”中的“儿童约束系统”,主要是在车内有儿童时,自动驾驶系统需要能够监测该儿童约束系统已正确使用,使车内儿童达到基本的安全条件。如无儿童时可用“NA”进行表示。
针对“驾驶员/动态驾驶任务后援用户状态”中的“与系统的匹配程度”,主要是对动态驾驶任务后援用户的基本情况进行识别,从而判断自动驾驶系统是否可以为其提供服务,如部分车辆要求成年人才能成为动态驾驶任务后援用户。
针对“乘客状态”中的“乘客与系统的匹配程度”,主要是对乘客的基本情况进行识别,从而判断自动驾驶系统是否可以为其提供服务,如部分车辆无法为单独乘车的儿童提供服务。
2.3 车辆状态
正常运行的车辆状态是自动驾驶系统启动和运行的前提条件之一。车辆状态包括激活速度范围和功能状态
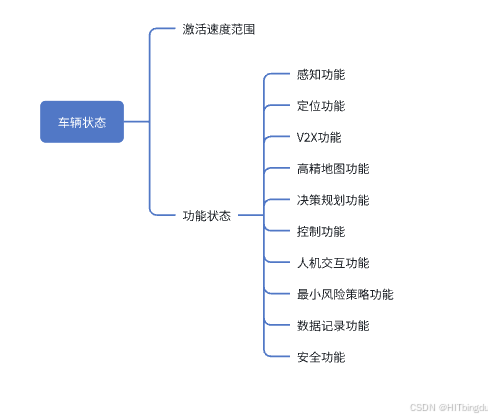
“激活速度范围”主要是自动驾驶系统能够开启的速度,通过识别车辆是否达到激活速度范围来判断车辆是否能够开启。
“功能状态”为自动驾驶系统安全启动、运行前需要进行自检的功能模块达到的状态,包括系统的软硬件功能状态,要求该自动驾驶功能状态能够满足自动驾驶系统安全启动和运行的条件要求。
2.4 L3智驾功能的ODC
ECE R157《自动车辆的自动化车道保持系统》法规规定了在特定情况下能够部分或完全控制车辆行驶的自动化车道保持系统(ALKS)的性能要求及安全要求。
本法规对应的自动驾驶等级为L3,ODD如下:
- 道路类型:仅限于在指定的道路上使用,如高速公路或其他类似的对车辆进行物理隔离的车道,其中非机动车和行人通常被禁止。
- 车辆速度:最大不超过 130km/h(前提:具备执行 MRM 变道的能力,否则速度上限为 60Km/h)
- 车辆状态:车辆必须满足安全标准,且所有必要的系统要素(如传感器和相机)需要处于正常工作状态。
- 思维准备的驾驶员:虽然 ALKS 可以接管驾驶任务,但驾驶员必须始终准备好在系统请求时接管控制。
而BWM/Benz在实际设计中的ODC如下:
| BMW | Benz | ||
| 自动驾驶等级 | L3 | L3 | |
| ODD | 静态实体 | 高速公路、城市高架等封闭道路 | 高速公路、城市高架等封闭道路 |
| 车道线可识别 | 车道线可识别 | ||
| 环境条件 | 无恶劣天气 | 无恶劣天气 | |
| 驾驶员状态 | 驾驶员始终准备好接管车辆 | 驾驶员始终准备好接管车辆 | |
| 车辆状态 | 车速区间 | 0~137km/h | 0~64km/h |
| 车辆满足安全标准 | 车辆满足安全标准 |
ALKS 统激活条件:
- 驾驶员在驾驶位,安全带系好
- 驾驶员具备接管能力
- ALKS 系统未发生失效
- 自动驾驶数据记录系统运行
- 外部环境及道路设施满足运行条件
- 系统自检结果显示无故障
- 道路条件:具备物理隔离,无对向车辆,无自行车及行人
MRM:
本车道刹停或靠边停车
3 智驾功能概述
| Functions | SAEJ3016 | ||
| 主动安全功能 | AEB | 自动紧急制动 | L0 |
| AES | 自动紧急转向 | L0 | |
| FCW/RCW | 前/后向碰撞预警 | L0 | |
| LDW | 车道偏离报警 | L0 | |
| BSD | 侧方盲区报警 | L0 | |
| DOW | 门开碰撞预警 | L0 | |
| 行车功能 | ACC | 自适应巡航 | L1 |
| LKA | 车道保持系统 | L1 | |
| LCC | 全场景辅助驾驶 | L2 | |
| NOA | 导航辅助驾驶 | L2 | |
| 泊车功能 | RPA | 遥控泊车 | L2 |
| APA | 自动泊车 | L2 | |
| AVP | 代客泊车 | L2+/L3/L4 | |
| APO | 智能泊出 | L2 | |
| 车位到车位 | L2+/L3/L4 |
3.1 主动安全功能
3.1.1 AEB自动紧急制动
车辆行驶过程中,当检测到车辆行进方向存在碰撞风险且驾驶员未采取有效的安全驾驶措施时,系统将主动施加制动以降低行驶车速,最大限度的减少碰撞的冲击,提高驾驶车辆安全性能。
自动紧急制动功能分为前向自动紧急制动和后向自动紧急制动功能。
功能作用条件:
- 车速5km/h以上(汽车,前AEB)
- 车速5~120km/h(VRU,前AEB)
- 车速5~45km/h(后AEB)
- D档 || R档
3.1.2 AES自动紧急转向
前向行驶时,自动紧急转向功能检测到本车与其他车辆存在碰撞风险,当驾驶员未采取有效的安全驾驶措施,且自动紧急制动(AEB)功能降速但仍不足以规避风险时,自动紧急转向触发并避让前方目标车辆,以降低碰撞风险,提高驾驶车辆安全性能。
功能作用条件:车速80~130km/h
3.1.3 FCW/RCW前/后向碰撞预警
- FCW
前向行驶时,前向碰撞预警功能检测到本车与前方行人、骑车人及车辆存在碰撞风险时,主动发出图像和声音提醒,提示驾驶员在合适时间内采取有效的安全驾驶措施。
功能作用条件:车速30~130km/h
- RCW
车辆向前行驶过程中,在检测到车辆可能被后方车辆追尾时发出预警并闪烁危险警告灯,提醒驾驶员在合适的时间内寻求躲避空间,同时警示后方车辆减速保持安全行车距离。
功能作用条件:车速0~135km/h
3.1.4 LDW 车道偏离预警
车道偏离辅助功能开启后,通过摄像头实时监测车辆在本车道的行驶状态,并在车辆出现非驾驶意愿的车道偏离时进行提醒或者纠偏,辅助驾驶员将车辆保持在原车道内行驶。
功能作用条件:车速60~135km/h
3.2 行车功能
3.2.1 ACC自适应巡航
自适应巡航功能可控制车辆的纵向速度以及跟车距离。车辆将按照设定的巡航车速行驶;或当前方出现低于设定巡航车速行驶的车辆时,车辆将自动保持与前车的距离,并跟随前车停止和起步。
3.2.2 LKA车道保持系统
在驾驶员注意力不集中或疲劳驾驶出现车辆偏转时,系统进行主动修正、转向干预。
3.2.3 LCC车道保持系统
全场景辅助驾驶功能主动根据跟车距离控制车辆的加减速,保持在车道中间行驶,可自主超车变道或响应驾驶员指令变道,可在直行车道响应信号灯启停。
LCC是一个典型的L2级别辅助驾驶功能,一般可以将LCC看作是ACC+LKA的功能组合。
3.2.2 NOA导航辅助驾驶
NOA导航辅助驾,是一种介于自动辅助驾驶和自动驾驶之间的功能,厂商宣传时一般被看作是L2+功能。因为车辆可依据导航路线自动行驶、自动变道超车、自动进出匝道等,更侧重于路径规划和自动驾驶,所以比传统的LCC功能更加智能。
NOA的发展也经历了几个阶段:从场景单一的高速NOA到城市NOA到全国都能开的无图方案
-
高速NOA
高速智能驾驶能够控制车辆在封闭环路和高速公路上,沿设定的导航路线行驶,支持自主超车、调节巡航车速和出入匝道。
功能作用条件:
- 封闭环路和高速公路
- 车速0~130km/h
-
城市NOA
城市智能驾驶可以按照车载地图导航路径切换车道、自主超越慢车、调节巡航速度、响应红绿灯通过路口(左转/直行/右转/掉头)。
功能作用条件:
- 城区道路
- 车速0~80km/h
3.3 泊车功能
3.3.1 RPA遥控泊车
遥控泊车主要解决狭窄车位泊入后上下车不便利的问题。
- 离车泊入
在使用自动泊车功能找到车位后,用户可以离车使用手机App控制车辆完成泊车的操作。
- 关门泊入
在使用自动泊车功能找到车位后 ,用户携带智能钥匙或蓝牙钥匙下车,通过长按门把手的方式触发泊入, 操作过程更加便捷流畅。
3.3.2 APA自动泊车
智能泊车系统通过环视摄像头和超声波雷达获取车辆周围车位、空间和障碍物信息,实时处理信息后计算出车辆泊入路线并控制车辆转向、换挡、加速及制动,完成泊车。
3.3.3 AVP代客泊车
车辆根据已学习路线,从停车场入口自动行驶到目标车位并泊入。
3.3.4 APO智能泊出
智能泊车系统通过环视摄像头和超声波雷达获取车辆周围车位、空间和障碍物信息,实时处理信息后计算出车辆泊入路线并控制车辆转向、换挡、加速及制动,完成泊出。
3.4 车位到车位功能
车位到车位是继城市NOA之后各个整车厂推出的又一个功能,打通了自动驾驶和自动泊车,实现了全场景的能力,给用户们提供点到点的自动驾驶能力。
功能作用条件:
- 已学习过车位的停车场*2
- 城区道路或封闭环路和高速公路
值得一提的是各家整车厂在实现车位到车位的功能时有不同的考量:
- 泊车+行车+泊车
通过APO+全场景NOA+APA,完成智能泊出+NOA+智能泊车等辅助驾驶功能的融合。这意味智驾系统将在泊车和行车两套系统里做切换
- 行泊一体
行车、泊车采用一个模型,无需切换。
4 Summary
综上,本文介绍了自动驾驶分级,自动驾驶系统的设计运行条件,以及典型的辅助驾驶/自动驾驶功能。可以看到自动驾驶在L2+的功能上已经逐渐把功能场景泛化到用户驾驶的各个场景,这些离不开传感器的升级、智驾系统算力的增加、AI大模型的迭代,可以说自动驾驶L3/L4的到来已经越来越近。

















 1838
1838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









