







 本文深入探讨3D车辆检测中的AP评价指标,解释了IOU、置信度、TP、FP、FN在计算过程中的作用。通过分析Kitti数据集的代码,理解了如何计算精度和召回率,以及绘制PR曲线和计算平均精度(AP)的步骤,以评估深度学习模型的性能。
本文深入探讨3D车辆检测中的AP评价指标,解释了IOU、置信度、TP、FP、FN在计算过程中的作用。通过分析Kitti数据集的代码,理解了如何计算精度和召回率,以及绘制PR曲线和计算平均精度(AP)的步骤,以评估深度学习模型的性能。
课题研究的是单目3D车辆的识别,采用的目标检测网络是SMOKE,为了可以更好的定量评测训练模型的性能,需要使用到合理的评测指标,目前比较流行的评测指标是得到多组precision和recall值画出PR曲线,然后计算PR曲线下的面积得到AP。
关于更详细的原理的介绍已经有很多优秀的文章,本篇博客主要是结合Kitti数据集的官网代码以及自己的理解做的一些总结,如有理解不当请斧正。
基本概念的理解
IOU:IOU指的是两个检测框的交并比,也就是两个框的重合程度,数值越大代表两个框重合度越高。在计算AP的过程中,IOU的一个作用是作为判断目标是否被检测出来的阈值,如果detection框与groundtruth框的IOU大于一定的阈值(比如说0.7),那么就说明目标别检测出来了。
注意:对于绘制PR曲线来说,判断目标是否被检测出来有两个重要指标,一个是上面说的IOU,还有一个就是置信度,所以我理解IOU的作用就是做一个固定值的过滤,后续画PR曲线的precision和recall值对其实是根据置信度的不断调整获得的。
TP,FP,FN:T和F代表true和false,P和N代表positive和negative,所以
- TP:检出目标是positive,groundtruth确实是true,说明目标被正确的检出
- FP:检出目标是positive,groundtruth却是false,说明误检出了不存在的目标,误检
- FN:检出目标是negative,groundtruth是true,说明本该被检出的没有检出,漏检
precision和recall:precision和recall的定义如下


那么在程序中我们应该如何计算TP、FP、FN呢?
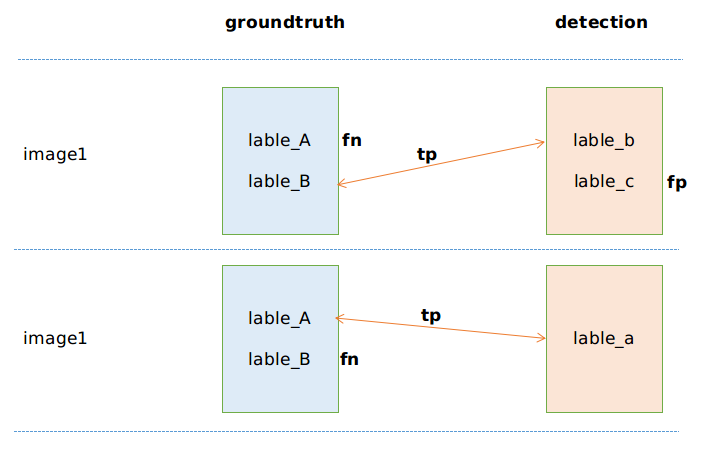
TP、FP:
遍历detection的每张image中的每个lable,比如image1中的label_b和lable_c,然后对于每一个lable,再遍历groundtruth中image1的所有lable,查看是否匹配,如果成功匹配到一个,那么TP+1,如果groundtruth中都没有匹配的,那么说明detection中此lable为误捡,则FP+1.
FN:
遍历groundtruth的每张image中的每个lable,比如image1中的label_A和lable_B,再去除刚才TP+1的时候匹配上的,如果还有剩下的,那么代表此lable漏检了,FN+1.
可以看到precision是针对detection,也就是所有detection检测的目标有多少是正确的,也叫作查准率;recall则是针对groundtruth,也就是groundtruth中所有的目标有多少是被检测出来的,也叫作查全率。
从定义可以看出,这两个是指标是矛盾的,要保证其中一个效果好,另一个必然保证不了效果。比如:如果希望precision(查准率)高,那么我就提高检测的阈值,我不用管没检测出来的,我只要保证我检测出来的就是真的目标,那么precision值肯定高,但是因为好多并没有检测出来,漏检很多,recall值肯
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1022
1022

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









