







目录
第1章 激光焊接过程监控系统LWM概述
LWM: Laser Welding Monitor => 激光焊接过程监控系统

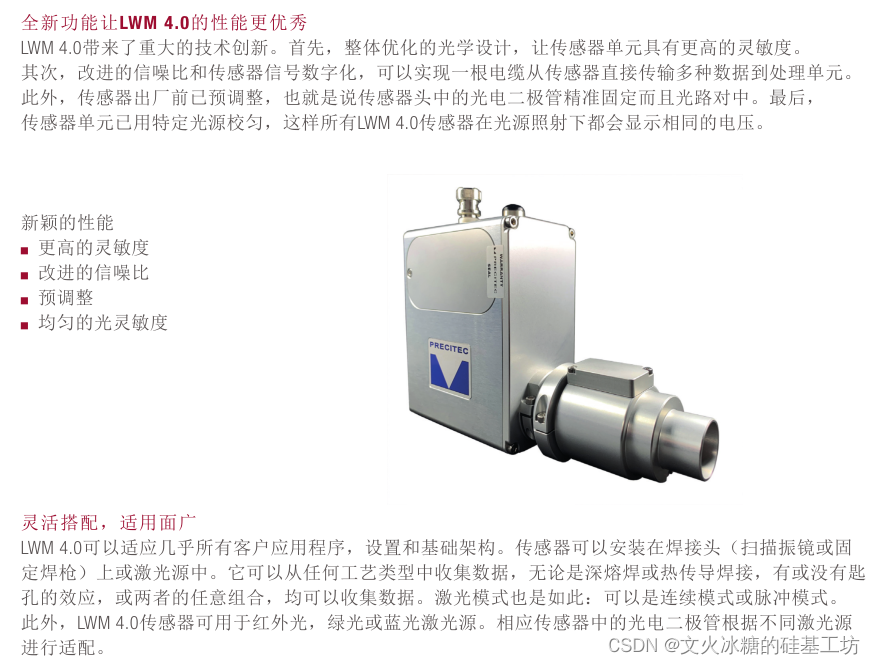
激光焊接实时监控系统LWM是一种应用在连续生产中的焊接质量的实时监控系统。它能够实时、在线、反馈焊接质量和生产相关的信息。
激光功率、焦点位置、焊缝深 度以及保护气体供应和流量大小都能被检测到。除了局部焊接缺陷,比如熔 合不充分外,LWM还可探测诸如焊接接口毛刺等组件缺陷和加紧装置上的缺陷。LWM通过对等离子体、热辐射和激光光束背反射基于时间的变化来实时 监控焊接的质量。在焊接过程中,LWM会比较收到的信号和参考值,然后将 偏差实时报告给焊接设备。
第2章 产品特性与功能
LWM属于非接触式焊接质量检测。
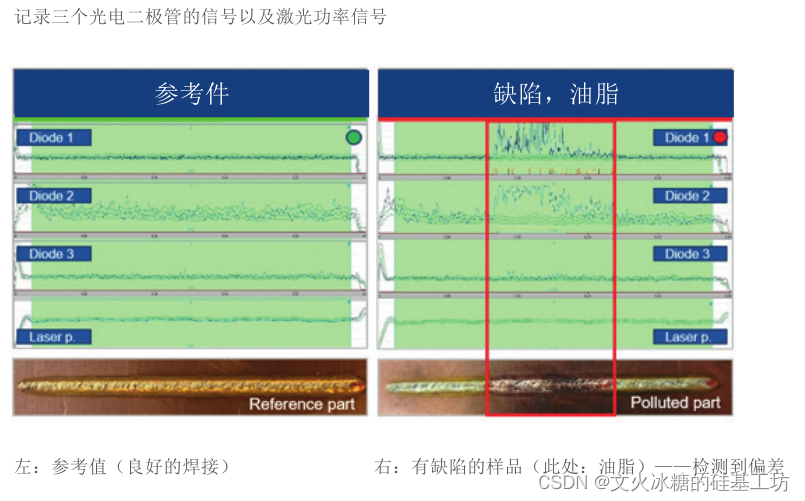
信号记录以及基于符合实际焊接过程的计算方法,可以提供多种缺陷信息,如穿透深度、焊透、焊接缺陷、焊缝位置、焊缝小孔、飞溅物等。
2.1 生产相关的信息
- 激光功率
- 焦点位置
- 焊缝深度
- 保护气体供应量
- 流量大小
- 焊缝位置
2.2 原始信息检测
- 热辐射
- 激光光束背反射
- 等离子辐射信号
2.3 焊接质量分析信息
- 局部焊接缺陷,比如熔合不充分
- 焊接接口毛刺等组件缺陷
- 加紧装置上的缺陷
- 焊缝小孔
- 飞溅物
2.4 缺陷报告与生产控制
- 可视化显示
- 告警
- 偏差实时报告给焊接设备,立即停止问题工件的生产。
2.5 LWM给客户带来的好处
(1)批量生产中进行质量全检测
- 提高交付产品的质量,提高客户满意度
- 实时监测焊接瑕疵,实现零缺陷
- 100%记录焊接过程信号且可本地存储
- 集成的数据可视界面 具备可追溯性
(2)促进生产过程的经济高效
- 实时检测和报警问题工件
- 立即停止问题工件的生产 // 需要与激光焊接系统对接
- 避免产品召回问题,提高生产效率
- 保证生产持续稳定性,避免产品质量波动
- 避免不良品率
- 产品质量和报警信号的可视化分析
- 减少生产中断
- 无需目测和破坏性检测 (无损检测)
2.6 适用范围
激光焊接实时监控系统LWM可应用于多种焊接过程:
- 深熔焊接
- 热传导焊接
- 脉冲激光
- 连续激光
2.7 人机界面 (HMI)
- 方便集成于现有的激光系统
- 用户界面的图形化显示 (GUI) 系统参数优化
- 远程维护 //支持TCP/IP协议
- 系统易于维护
- 可集成于质控系统中 //能够与生产质量监控系统MES对接
- 实时显示功率变化成为可能
第3章 焊接质量检测的原理
3.1 基本原理
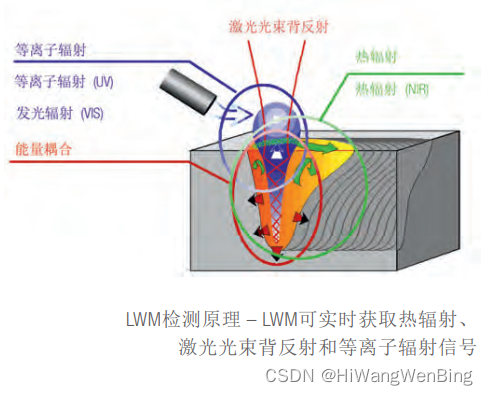
LWM通过对等离子体、热辐射和激光光束背反射,基于时间的变化来实时监控焊接的质量。
在焊接过程中,LWM会比较收到的信号(离子体、热辐射和激光光束)和合格产品的信号参考值,然后,将偏差实时报告给焊接设备。
- 三种信号检测:等离子体、热辐射和激光光束背反射。
- 实时分析:
- 偏差报告:LWM将实时偏差报告给焊接设备。
- 焊接设备:采取行动实时报警或调整焊接?
3.2 技术规格
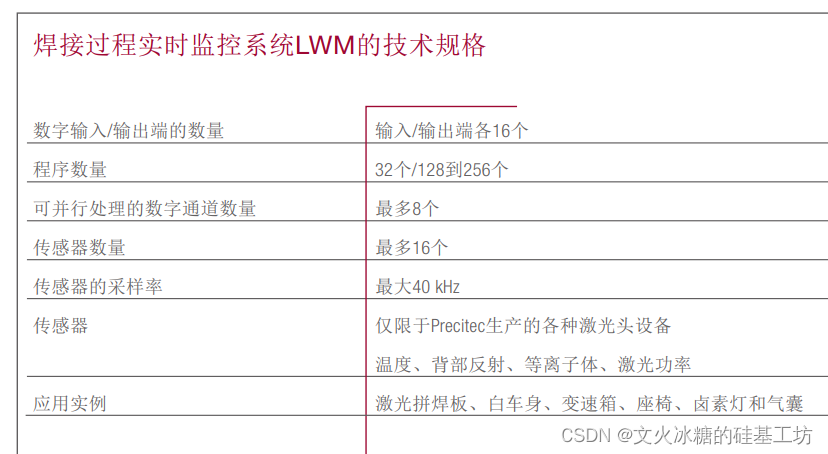
(1)传感器(最大16个)
- 激光功率 (1路)
- 温度
- 激光背部反射(3路)
- 等离子体
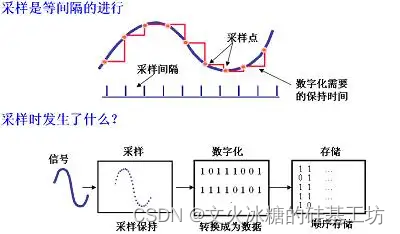
(2)传感器模数转换的采样率
- 最大40KHz =》1秒中40K个采样点,采样周期T=0.025ms = 25us
备注:
采样频率,也称为采样速度或者采样率。它定义了单位时间内从模拟-连续信号中提取并组成离散信号的采样个数,它用赫兹(Hz)来表示。
采样频率的倒数是采样周期或者叫作采样时间,它是采样之间的时间间隔。
通俗的讲采样频率是指计算机单位时间内能够采集多少个信号样本。
(3)数字信号处理的并行通道
- 8个通道 // => 8个并行通道可能是DSP或FPGA进行并行计算的。
3.3 缺陷分析
3.4 技术创新
第4章 LWM系统组成
LWM系统可以集成在光纤激光器、碟片激光器、二极管激光器和CO2 激光器中。
LWM中的核心原件是传感器,它能够实时获取热辐射、激光光束背反射和等离子辐射信号。
4.1 传感器构成
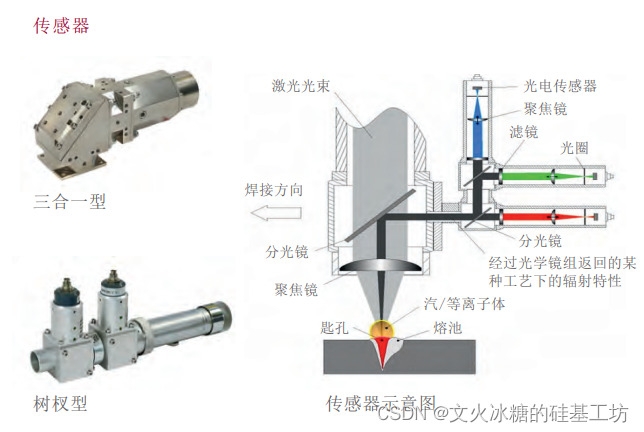
三合一信号检测:
- 等离子辐射信号检测
- 热辐射温度检测
- 激光光束背反射信号检测
4.2 传感器与激光焊接系统的集成

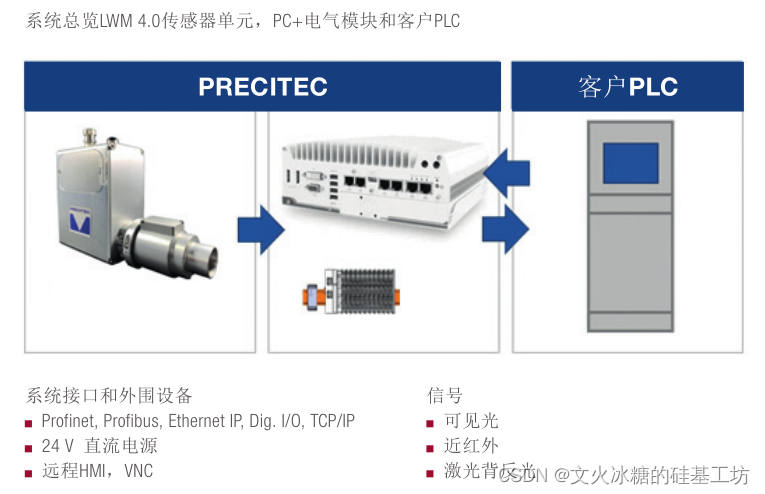
4.3 其他系统外围设备
- 适配行业标准接口 // RS232、RJ45,
- 先进的通讯接口,现场总线和I/O接口
- 根据客户需求,可将硬件集成在交互柜、终端控制盒或者集成商设备中
- 24伏技术 // 24V直流供电
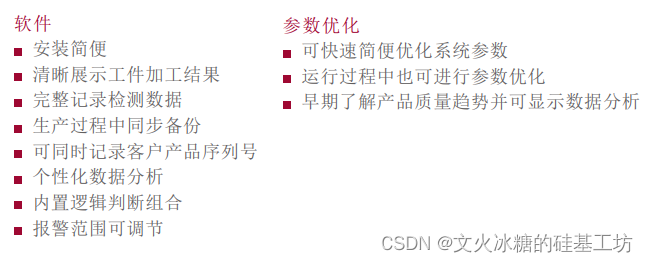
4.4 软件与焊接过程可视化

第5章 案例分析
附录:
1. 采样率
通俗的讲采样频率是指计算机单位时间内能够采集多少个信号样本,比如对于波形记录而言,此时采样频率可以是描述波形的质量标准。
采样频率越高,即采样的间隔时间越短,则在单位时间内计算机得到的样本数据就越多,对信号波形的表示也越精确。
采样频率与原始信号频率之间有一定的关系,根据奈奎斯特理论,只有采样频率高于原始信号最高频率的两倍时,才能把数字信号表示的信号还原成为原来信号。
在科学领域,常用的采样率有:
30 Hz (30 fps) - 普通摄像机的帧率
60 Hz (60 fps) - 人眼的理论帧率
960~1920 Hz (960~1920 fps) - 手机慢动作摄影帧率
10 kHz (10000 fps) - 高速摄影机帧率
4.2 MHz - PAL图像信号采样率1
5.5 MHz - PAL图像信号采样率2
5.6 MHz - PAL图像信号采样率3
6.2 MHz - NTSC图像信号采样率
8.0 MHz - SECAM图像信号采样率
13.5 MHz - CCIR 601、D1 video
4.0 GHz - 计算机CPU能够处理的理论最高采样率
256 GHz - 示波器能达到的最高采样率
1.6 PHz - 要完整记录可见光波形所需要的最低采样率(科技水平尚未达到)
41.3 PHz - 观察原子级别运动所需要的采样率
1.85×1043 Hz - 普朗克频率(宇宙的采样率)
采样频率越高,获得的波形质量越好,占用存储空间也就越大。



















 2380
2380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











