







 本文详细介绍了RT-Thread中的标准版系统架构,以及线程间通信的关键机制,如信号、事件、互斥锁、消息队列和邮箱,以及它们在任务同步和通信中的应用。
本文详细介绍了RT-Thread中的标准版系统架构,以及线程间通信的关键机制,如信号、事件、互斥锁、消息队列和邮箱,以及它们在任务同步和通信中的应用。
目录
3.2 RT Thread 信号Signal与事件Event的比较
一、RT-Thread标准版系统架构
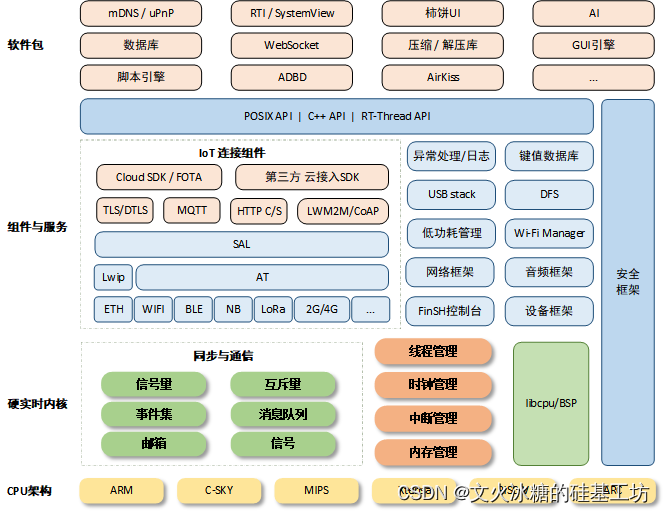
二、RT Thread线程间通信与同步机制
RT-Thread提供了多种线程间通信和同步机制,以支持多任务操作系统的正常运行。以下是RT-Thread中常用的线程间通信和同步机制:
-
同步-信号量(Semaphore):
- 信号量是一种用于控制多个线程对共享资源的访问的同步机制。它可以用于确保在任何时刻只有一个线程可以访问共享资源。
- RT-Thread提供了信号量的API,如
rt_sem_init、rt_sem_take和rt_sem_release等,用于创建、获取和释放信号量。
-
互斥锁(Mutex):
- 互斥锁是一种用于保护共享资源免受并发访问的同步机制。只有拥有互斥锁的线程可以访问被保护的资源。
- RT-Thread提供了互斥锁的API,如
rt_mutex_init、rt_mutex_take和rt_mutex_release等,用于创建、获取和释放互斥锁。
-
消息队列(Message Queue):
- 消息队列允许线程之间通过发送和接收消息来进行通信。每个消息都有一个优先级,允许高优先级的消息先被处理。
- RT-Thread提供了消息队列的API,如
rt_mq_create、rt_mq_send和rt_mq_recv等,用于创建、发送和接收消息队列。
-
邮箱(Mailbox):
- 邮箱是一种用于线程间传递固定大小的消息块的通信机制。每个邮箱可以存储多个消息块,线程可以从邮箱中发送和接收消息块。
- RT-Thread提供了邮箱的API,如
rt_mb_create、rt_mb_send和rt_mb_recv等,用于创建、发送和接收邮箱。
-
异步-事件(Event):
- 事件是一种允许线程等待特定事件发生的同步机制。线程可以等待一个或多个事件的任何组合。
- RT-Thread提供了事件的API,如
rt_event_init、rt_event_send和rt_event_recv等,用于创建、发送和接收事件。
这些线程间通信和同步机制为RT-Thread提供了强大的多任务支持,使得开发者能够轻松地在嵌入式系统中实现复杂的多任务应用。开发者可以根据具体的应用需求选择合适的通信和同步机制。
二、事件与事件集event
2.1 异步事件
在 RT-Thread 中,事件通常指的是线程等待特定事件的发生,并在事件发生时被唤醒继续执行的机制。以下是关于 RT-Thread 事件的介绍:
-
事件的创建:
- 使用
rt_event_init函数创建一个事件对象。该函数返回一个事件的句柄,用于后续对事件的操作。
- 使用
-
事件的发送:
- 通过
rt_event_send函数向事件对象发送一个或多个事件。可以通过在函数参数中指定事件的标志位来发送特定的事件。
- 通过
-
事件的接收和等待:
- 线程可以使用
rt_event_recv函数从事件对象中接收事件,并等待指定的事件发生。可以通过在函数参数中指定期望等待的事件标志位来实现等待特定事件的发生。
- 线程可以使用
-
事件的清除:
- 可以使用
rt_event_clear函数清除事件对象中的特定事件标志位。
- 可以使用
通过以上操作,线程可以在需要等待某些条件满足时挂起,并在事件发生时被唤醒继续执行。这种事件机制在实现多任务应用中非常有用,可以实现线程之间的同步和通信。
2.2 事件集
在 RT-Thread 中,事件集是指一组事件的集合,允许线程等待其中任何一个或多个事件的发生。通过事件集,可以更灵活地管理线程的同步和通信。以下是关于 RT-Thread 事件集的介绍:
-
事件集的创建:
- 开发者可以使用
rt_event_init函数来创建一个事件集。该函数会返回一个事件集的句柄,用于后续对事件集的操作。
- 开发者可以使用
-
事件的发送:
- 使用
rt_event_send函数向事件集发送一个或多个事件。可以通过在函数参数中指定事件的标志位来发送特定的事件。
- 使用
-
事件的接收和等待:
- 线程可以使用
rt_event_recv函数从事件集中接收事件,并等待指定的事件发生。可以通过在函数参数中指定期望等待的事件标志位来实现等待特定事件的发生。
- 线程可以使用
-
事件的清除:
- 可以使用
rt_event_clear函数清除事件集中的特定事件标志位。
- 可以使用
通过以上操作,线程可以根据自身需要等待特定事件的发生,并在事件发生时被唤醒继续执行。事件集的使用提供了一种灵活的线程同步和通信机制,有助于实现复杂的多任务应用。
三、信号signal
3.1 概述
RT-Thread的信号(Signal)机制是一种用于任务间同步和通信的机制。信号可以用于触发和通知任务,使得任务可以在特定条件下执行或者唤醒。在RT-Thread中,信号可以通过信号量、事件标志组等方式进行实现。
通过信号机制,一个任务可以向另一个任务发送信号,通知其某个事件已发生或者某个条件已满足,从而触发被通知的任务执行相应的操作。信号机制可以实现任务之间的协作,提高系统的响应速度和效率。
在RT-Thread中,信号机制可以通过信号量实现临界区保护、资源共享和任务同步,也可以通过事件标志组实现事件驱动的任务调度和同步。通过合理使用信号机制,可以提高系统的可靠性和实时性,使得任务间的通信和同步更加高效和灵活。
3.2 RT Thread 信号Signal与事件Event的比较
RT-Thread中的信号(Signal)和事件(Event)都是用于任务间同步和通信的机制,但在功能和使用方式上有一些不同。
- 信号(Signal):主动通知
- 信号是一种用于通知和触发任务执行的机制,一个任务可以向另一个任务发送信号,通知其某个事件已发生或者某个条件已满足,从而触发被通知任务执行相应的操作。
- 信号可以通过信号量、信号量集等实现,在RT-Thread中提供了丰富的信号机制的支持。
- 信号适合于任务之间的直接通信和同步,可以实现任务间的协作和消息传递。
- 事件(Event): 被动等待
- 事件是一种用于任务调度和同步的机制,任务可以通过等待和触发事件来实现任务的调度和同步。
- 事件可以通过事件标志组等方式实现,在RT-Thread中也提供了丰富的事件机制的支持。
- 事件适合于事件驱动的任务调度和同步,可以实现任务间的时间控制和状态同步。
在使用上,信号适合于任务直接的通信和触发操作,而事件适合于任务的调度和同步。在实际应用中,可以根据具体的需求选择合适的机制来实现任务间的数据传递和同步。
四、邮箱
4.1 RT-Thread 中的“邮箱”
在 RT-Thread 中,“邮箱” 通常指的是消息队列,用于线程间的消息传递。
以下是关于 RT-Thread 邮箱(消息队列)的介绍:
-
消息队列的创建:
- 使用
rt_mq_create函数创建一个消息队列。该函数返回一个消息队列的句柄,用于后续对消息队列的操作。
- 使用
-
消息的发送:
- 通过
rt_mq_send函数向消息队列发送消息。可以在函数参数中指定发送的消息内容和消息的长度。
- 通过
-
消息的接收:
- 线程可以使用
rt_mq_recv函数从消息队列中接收消息。可以在函数参数中指定接收消息的缓冲区和缓冲区的大小。
- 线程可以使用
-
消息队列的删除:
- 可以使用
rt_mq_delete函数删除消息队列,并释放相关资源。
- 可以使用
消息队列提供了一种线程间进行异步通信的机制,适用于需要在不同线程之间传递数据的场景。通过消息队列,线程可以发送和接收消息,实现数据的共享和传递,从而实现多任务应用中的协作和同步。
4.2 邮箱与消息队列的区别
RT Thread 是一个实时操作系统内核,它提供了线程、消息队列和邮箱等通信机制用于多任务间的数据交换,但它们有一些区别:
-
线程:RT Thread 提供了线程的概念,允许用户创建多个线程来同时执行不同的任务,每个线程拥有自己的堆栈空间和优先级。线程可以通过信号量、互斥锁等机制实现同步和互斥。
-
消息队列:消息队列是 RT Thread 提供的一种通信机制,用于在不同线程之间传递数据或消息。消息队列可以保证消息的顺序性和完整性,多个线程可以同时往消息队列中发送或接收消息,实现数据的传递和共享。
-
邮箱:邮箱也是 RT Thread 提供的一种通信机制,它与消息队列类似,用于线程之间传递数据或消息。与消息队列不同的是,邮箱是一对一的通信,即发送方只能把消息发送给指定的邮箱接收方,而消息队列则允许多个接收方同时从队列中取出消息。
总的来说,线程是 RT Thread 中的基本执行单元,消息队列和邮箱则是用于不同线程之间的数据通信和同步。它们的选择取决于具体的应用场景和需求。
在RT Thread中,邮件和消息队列都是重要的通信机制,它们在以下几个方面有所不同:
-
对象类型:邮箱是一对一的通信机制,即一个邮箱对应一个接收方;消息队列是多对多的通信机制,允许多个发送方和接收方同时进行数据交换。
-
数据结构:邮箱通常是一个缓冲区或者邮箱对象,用于存储发送方发送的数据;消息队列则是一个先进先出的队列结构,多个任务可以向队列中发送消息,多个任务可以从队列中接收消息。
-
通信方式:在使用邮箱时,发送方需要明确指定接收方的邮箱地址,数据是直接传递给接收方的邮箱;而在使用消息队列时,发送方只需要将消息发送到队列中,接收方可以从队列中获取消息,消息队列实现了接受方与发送方完全的分离。
-
应用场景:由于邮箱是一对一的通信机制,适合于点对点的通信,比如私密信息的传递等;而消息队列适合于多任务之间的数据传递和共享,可以实现多对多的通信。
综上所述,邮箱和消息队列在RT Thread中都有各自的优势和适用场景,可以根据具体需求选择合适的通信机制来实现任务间的数据交换和同步。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











