






turtlebot
是已有的硬件ros机器人,为了方便入门上手,有合成好的简单的gazebo仿真世界供于入门学习,现在已经有高版本turtlebot3,但是一些比较老的、感觉还行的书还沿用了旧版的turtlebot,本篇仅仅做简单的记录。turtlebot3 也已经有大佬做了 请移步大佬帖子
简单的准备
首先下载turtlebot的仿真世界模型
// melodic是版本 根据自己的更改
sudo apt-get install ros-melodic-turtlebot-gazebo
启动
roscore
// 启动世界 3的话就是turtlebot3_gazebo 也可以打开看看
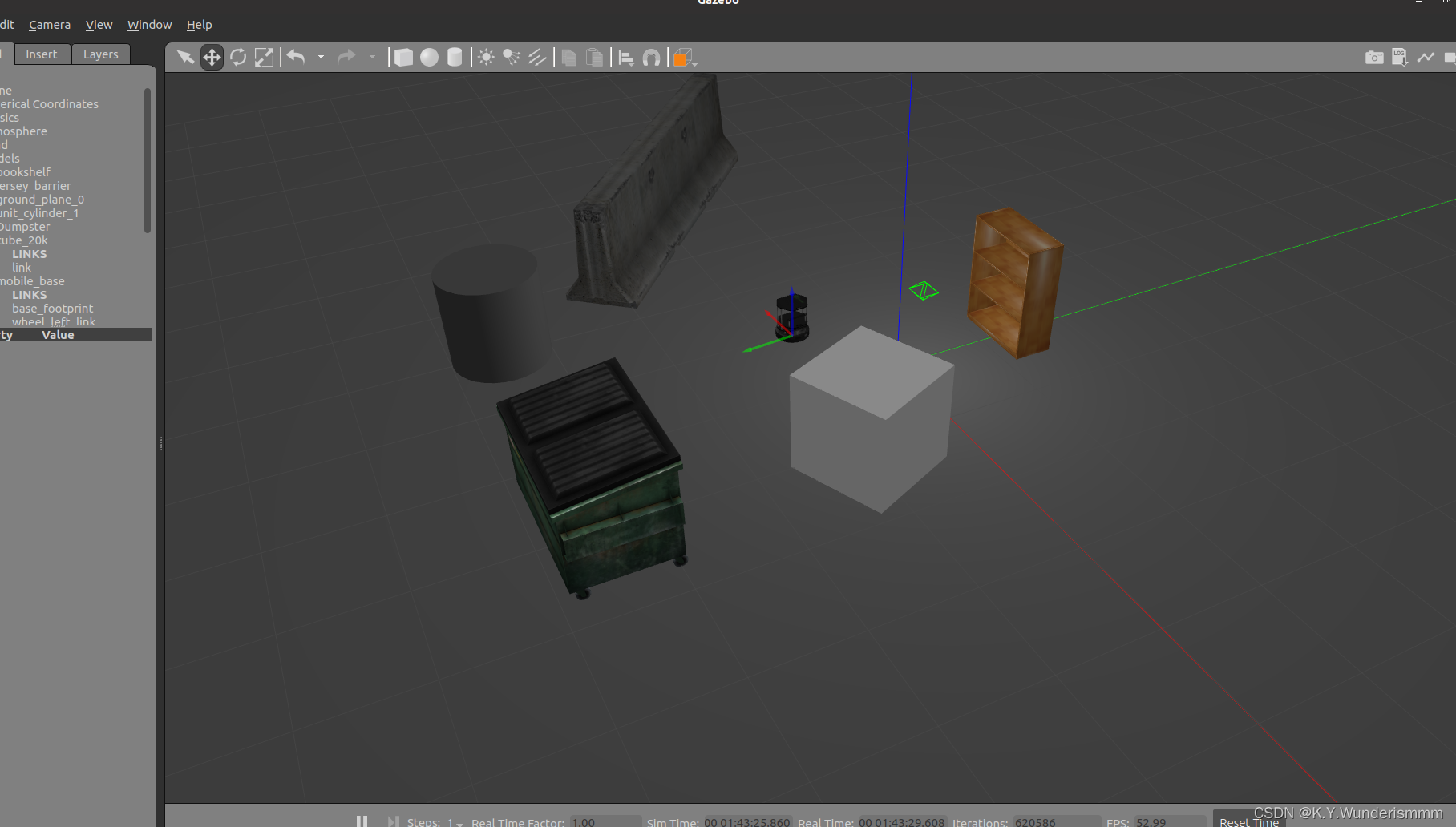
roslaunch turtlebot_gazebo turtlebot_world.launch
打开之后就会看到这样
配置rviz
如果想用现成就可以直接
roslaunch turtlebot_gazebo turtlebot_gazebo_rviz.launch
如果想要自己添加topic则先直接打开
rviz
首先将global options的fixed frame设为odom因为第一次,没建图不能用map
 之后在左下角add中,添加topic
之后在左下角add中,添加topic
需要添加的有:
①LascerScan 添加后更改topic为/scan
②Map topic更改为/map
③TF Frames仅留下base_link和odom即可
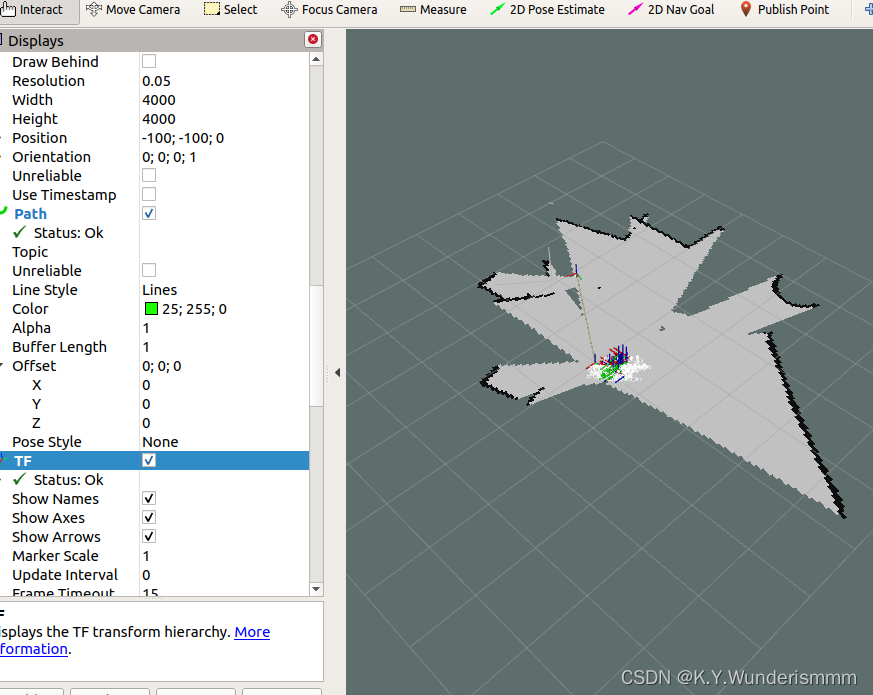
④Path
这些做完是还没能看到图的
切记切记 都做完以后再做slam
rosrun gmapping slam_gmapping
这会感觉就来了
移动她带她四处走走
打开键盘控制输入
roslaunch turtlebot_teleop keyboard_teleop.launch
一定要在这个terminal控制,其操控方式分别为:ijl,——前进 左转 右转 后退
uom.——左前转 右前转 左后转 右后转
走完一遍大致图就能做出来了 最后保存 (尽量别撞了,撞了以后图就会不准,她会觉得自己一直在走)
保存路径自选
//保存路径自选
rosrun map_server map_saver -f ~/catkin_ws/src/turtlebot/turtlebot_simulations/turtlebot_gazebo/map
/***********************************************************************************************/
之后?等我再学学

















 2982
2982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









